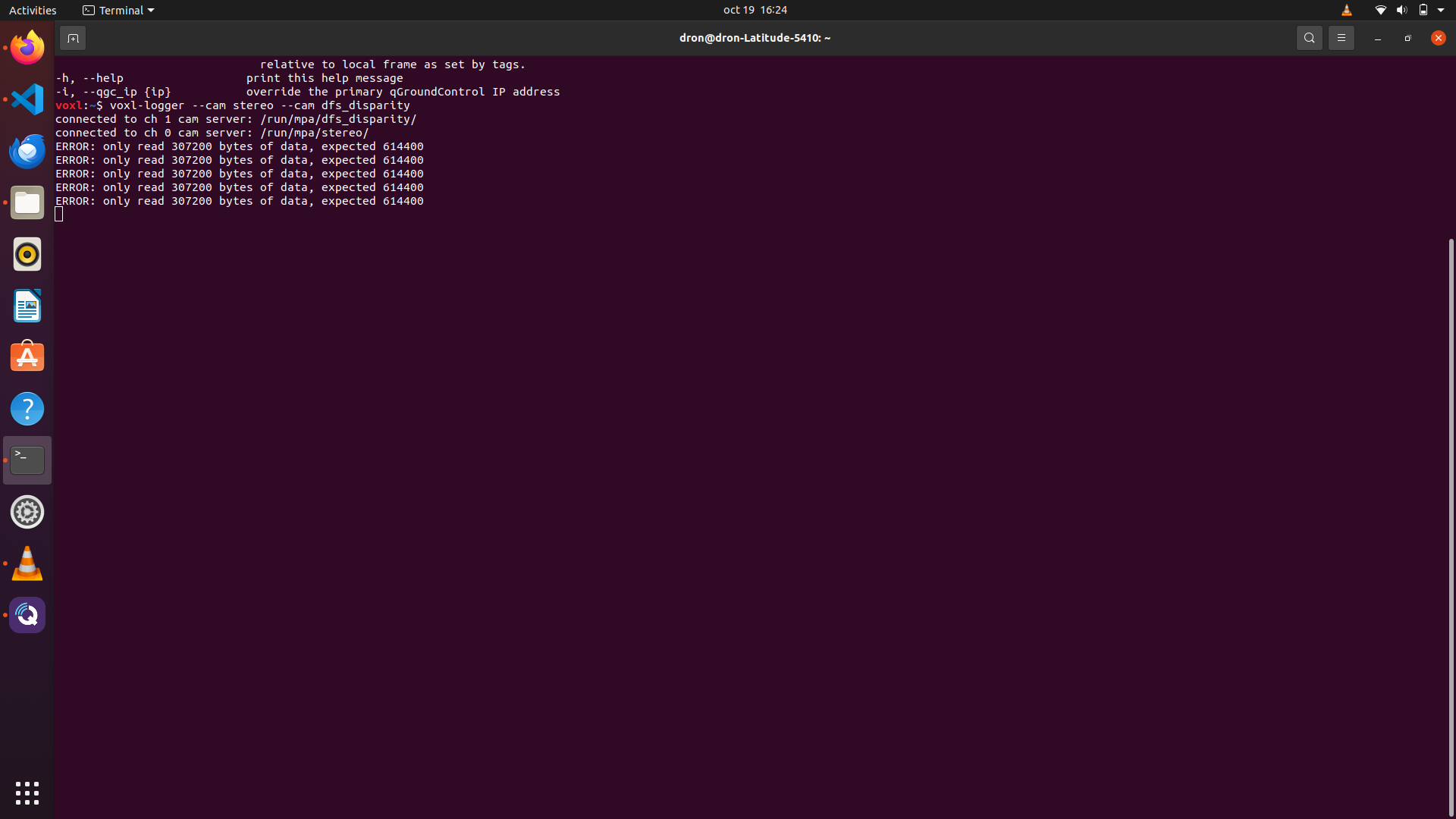
Error while voxl-logger --cam stereo -cam dfs_disparity
-
I'm trying to use the obstacle avoidance for a proyect but I got some errors, the more recent one is this one
I try following this guide:https://docs.modalai.com/voxl-vision-px4-collision-prevention-0_9/
But I couldn't get through this part: Debugging Collision PreventionBut even though I decided to enable the voa to qgc and my drone keeps connecting and disconnecting and when I activate the obstacle avoidance its says I have an error in the pre arm check and the obstacle avoidance it's not ready
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login