VIO gravity correction
-
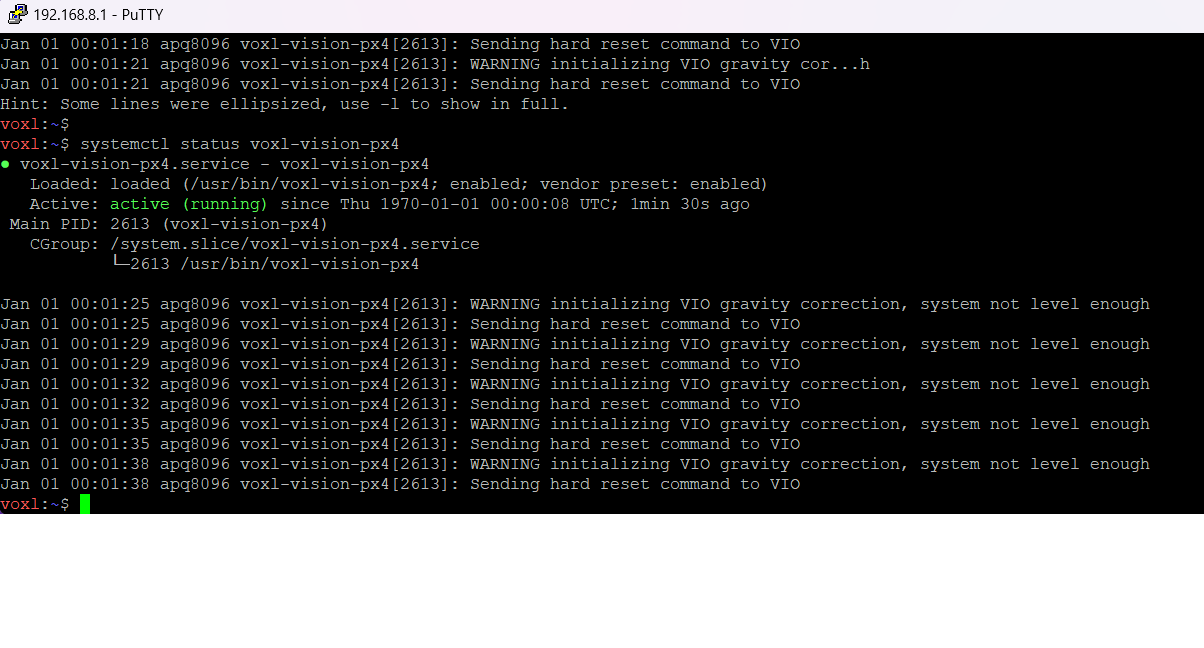
HI. I'm working on just the VOXL board and I've integrated my own Pixhawk 4 flight controller. When I'm trying to print the odometry on the terminal by doing the command "voxl-vision-px4 -o" I'm getting this ```
WARNING initializing VIO gravity correction, system not level enoughWhat could be the possible reasons for this? I've done caliberation numerous times now making sure everything is correct and the overall system does look level. I have placed the Pixhawk on top of the VOXL board. I also tried disconnecting the pixhawk 4 connections (Power and communication port) with the VOXL, to check if this changes anything on VOXL, but the result is still the same. Is there anything else that I should be looking at? -
If you've changed the orientation of the boards you'll need to make sure that you update the reference extrinsics to specify your board's orientation. For instance, even if your imus are showing 0,-9.8,0 the voxl-vision service may be expecting gravity to be in the x direction. The config file for this is at
/etc/modalai/extrinsics.conf. You can look at some of the default configurations that we have for the drone bodies that we sell at/usr/share/modalai/extrinsic_configs/. -
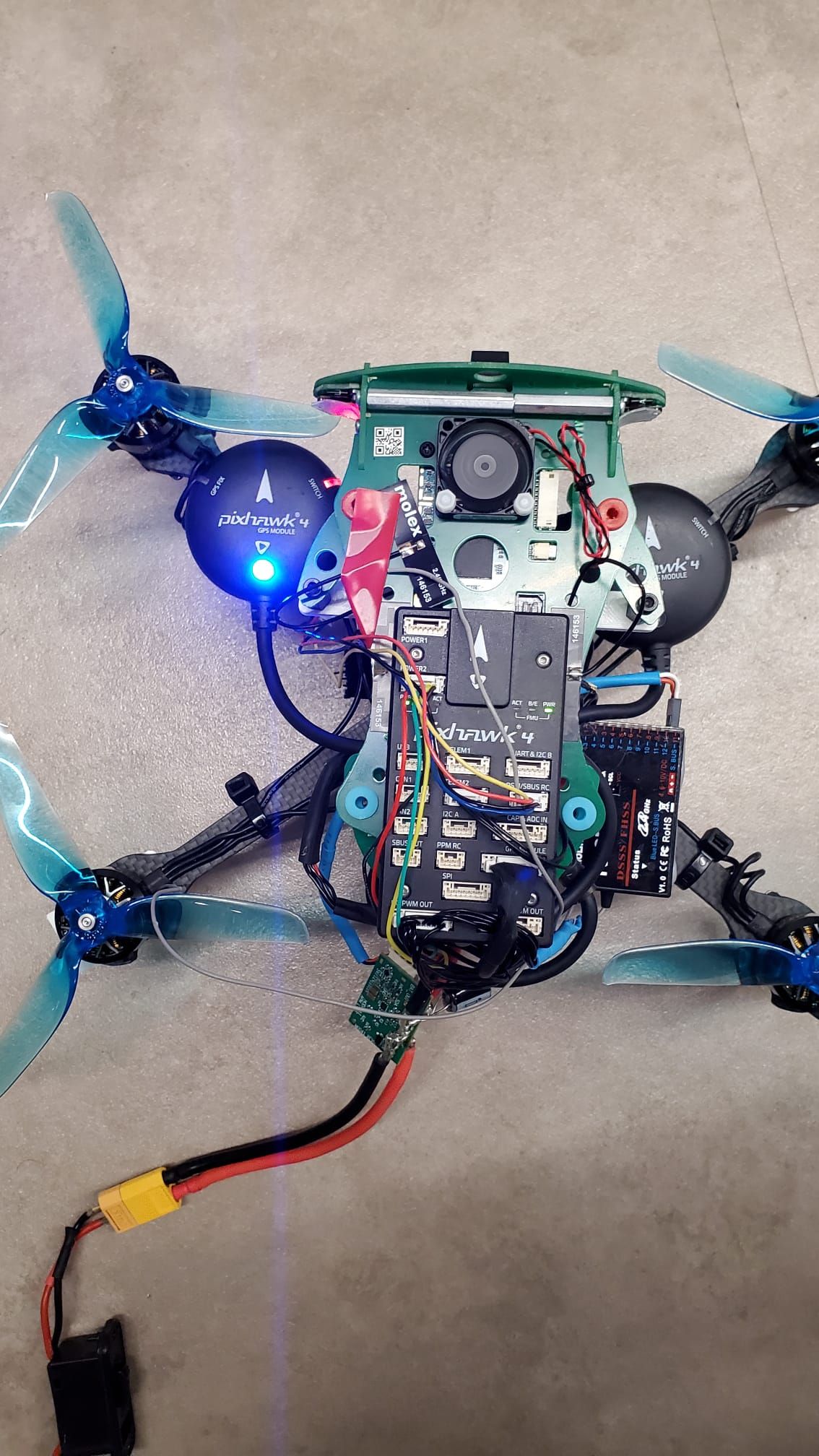
@Alex-Gardner this is the orientation of the boards which look fine to us. I'm attaching the picture. For the image that attached , the imus value are 0,0,-9.8. We checked this on QGC on highres_imu
-
@Alex-Gardner the issue is solve. The imu0 was not working, so by switching to imu1, it worked. Thanks for the help.
But we don't know why imu0 is giving very off values compared to imu1 , its a new voxl board that we have. -
J José Quintanilla referenced this topic on
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login