How can I use MAVLINK to obtain odometry values
-
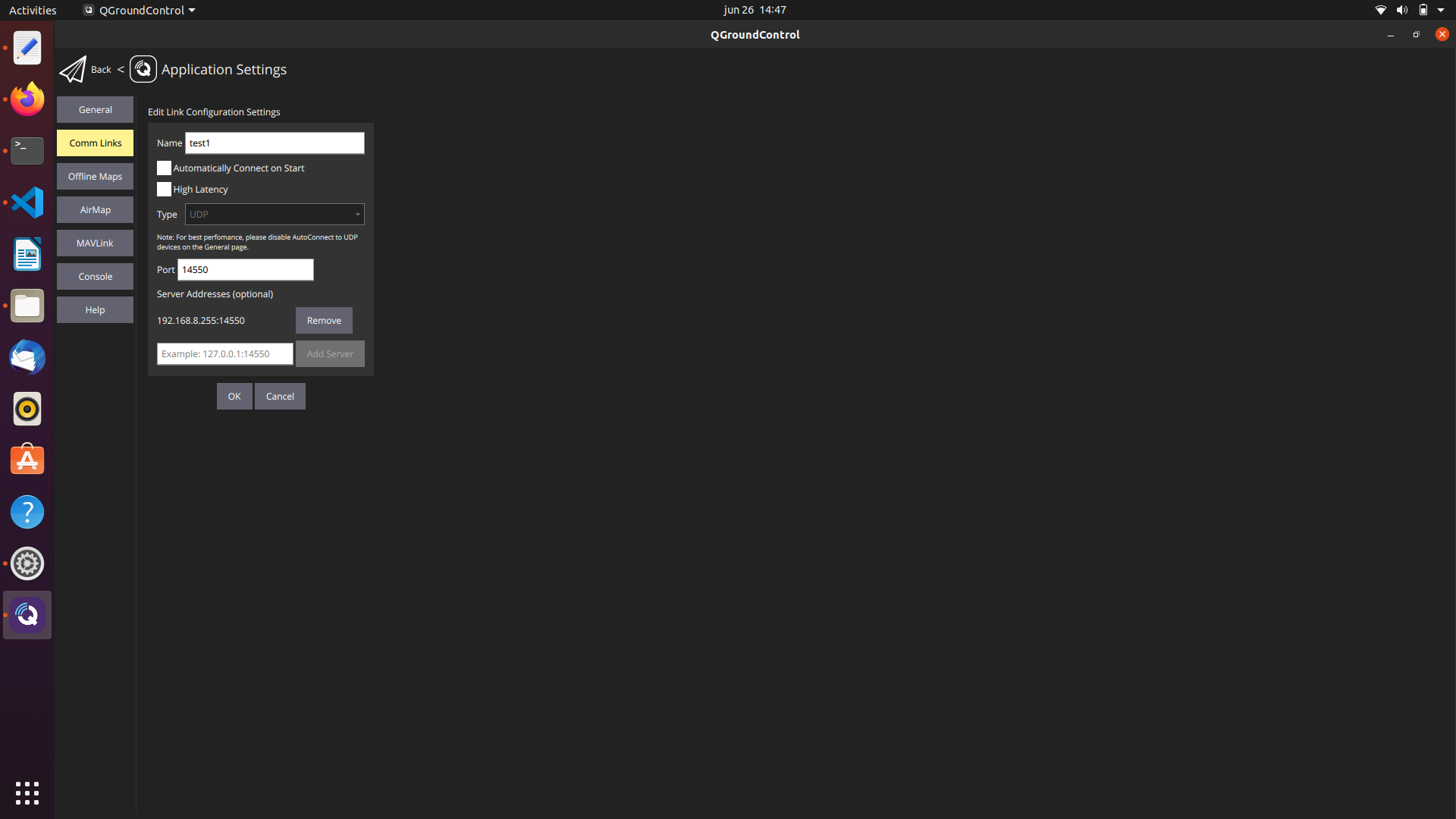
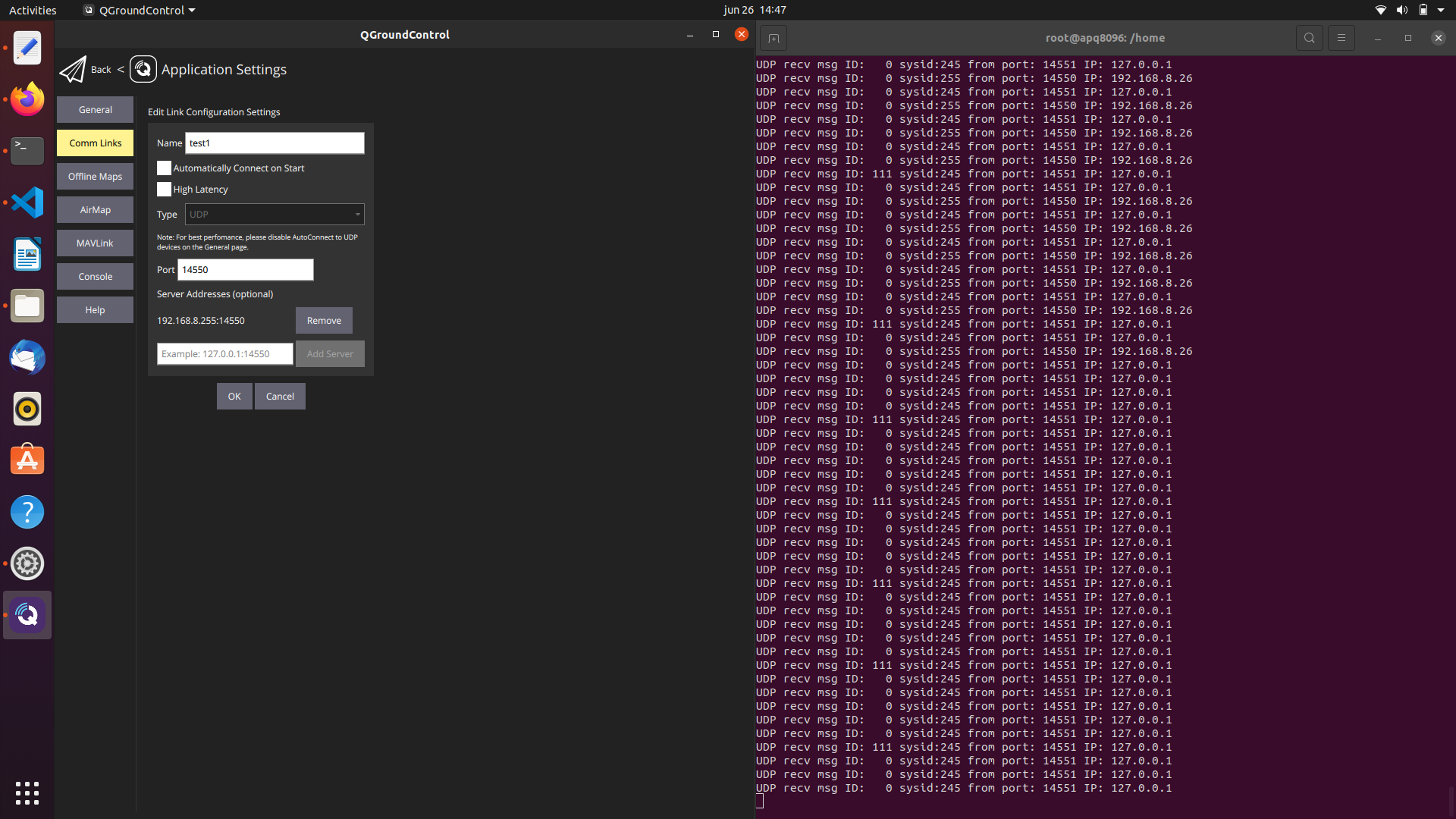
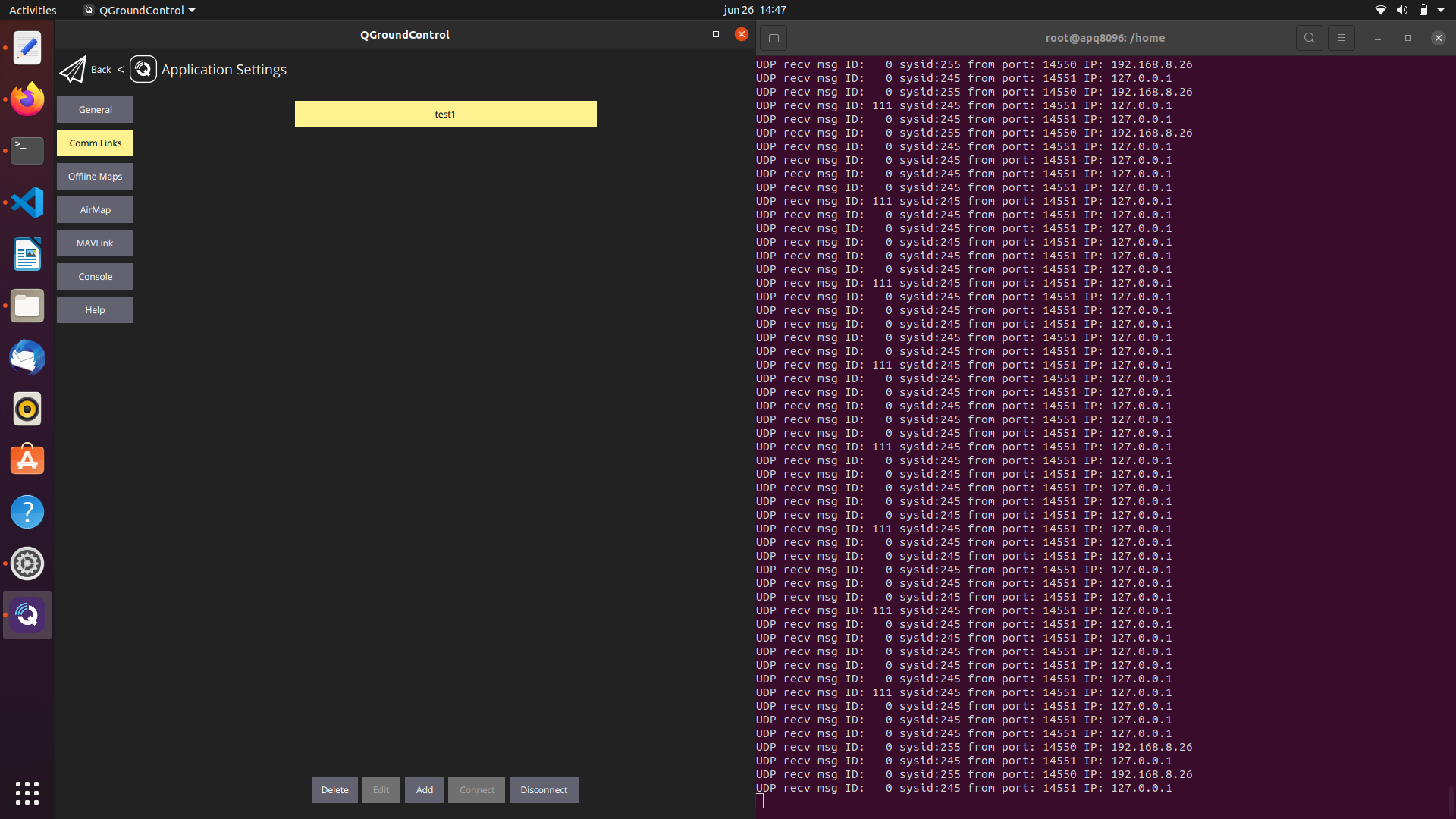
I already have the code working with a SITL but I want to be able to connect my laptop to the drone and obtain the data, im able to connect through QGC but not through the code
from pymavlink import mavutil import asyncio async def run(): while True: # Start a connection listening on a UDP port the_connection = mavutil.mavlink_connection('udpin:localhost:14550') # Wait for the first heartbeat # This sets the system and component ID of remote system for the link the_connection.wait_heartbeat() print("Heartbeat from system (system %u component %u)" % (the_connection.target_system, the_connection.target_component)) asyncio.sleep(2) # Once connected, use 'the_connection' to get and send messages msg = the_connection.recv_match(type ='ODOMETRY',blocking=True) msg = str(msg) msg = msg.split(',') print(msg[17]) #print(msg) asyncio.sleep(2) if __name__ == "__main__": loop = asyncio.get_event_loop() loop.run_until_complete(run())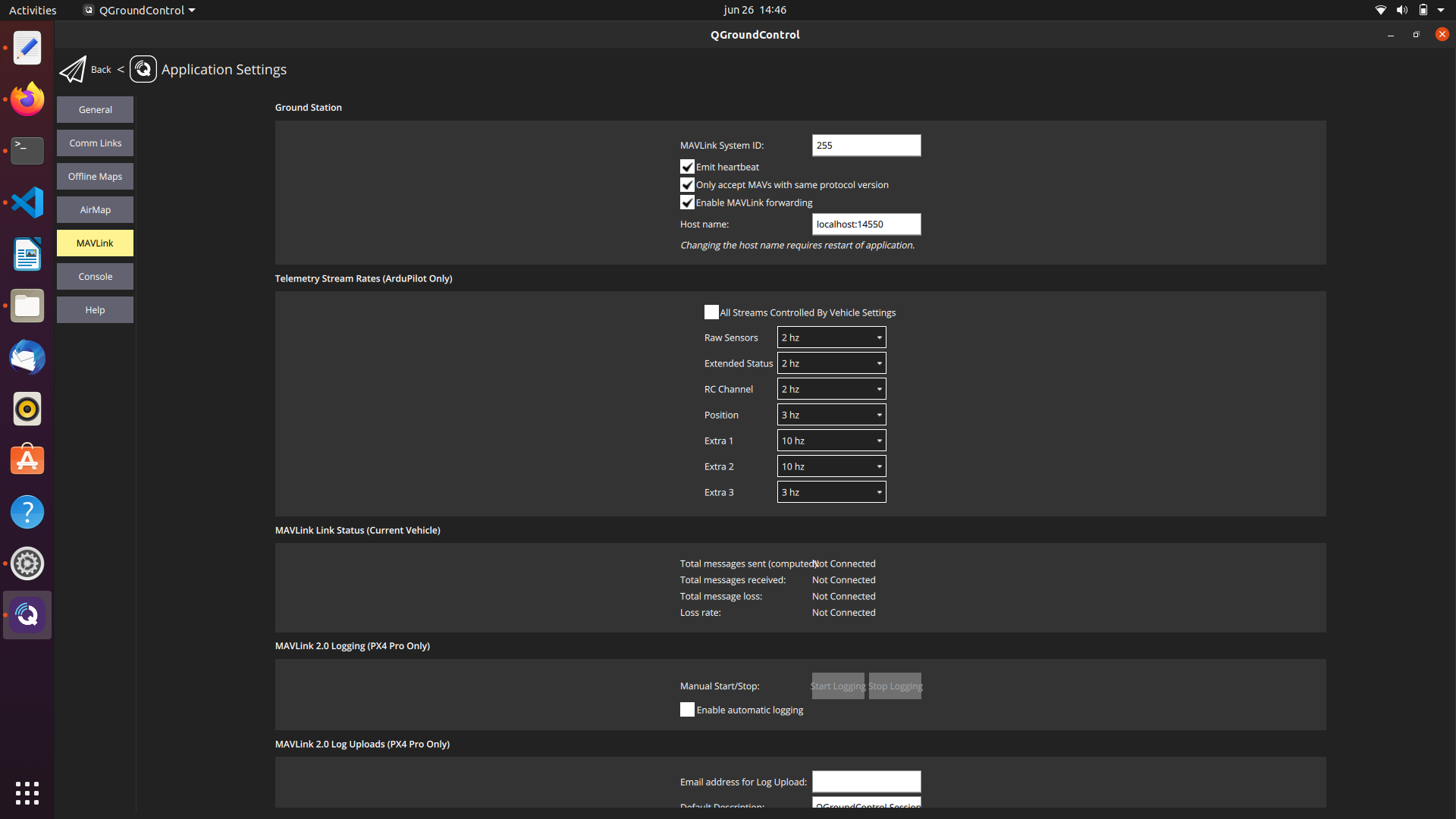
-
I already have the code working with a SITL but I want to be able to connect my laptop to the drone and obtain the data, im able to connect through QGC but not through the code
from pymavlink import mavutil import asyncio async def run(): while True: # Start a connection listening on a UDP port the_connection = mavutil.mavlink_connection('udpin:localhost:14550') # Wait for the first heartbeat # This sets the system and component ID of remote system for the link the_connection.wait_heartbeat() print("Heartbeat from system (system %u component %u)" % (the_connection.target_system, the_connection.target_component)) asyncio.sleep(2) # Once connected, use 'the_connection' to get and send messages msg = the_connection.recv_match(type ='ODOMETRY',blocking=True) msg = str(msg) msg = msg.split(',') print(msg[17]) #print(msg) asyncio.sleep(2) if __name__ == "__main__": loop = asyncio.get_event_loop() loop.run_until_complete(run())
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login