This is solved. I'm made to source my_ros_env.sh file everytime before launching the mpa file. But this never used to happen before. Anyway for now its working by sourcing the my_ros_env.sh everytime. Thanks all!
Posts
-
Voxl_mpa_to_ros -
Voxl_mpa_to_ros@Dong-Liu yes that's correct. Everytime a master ip or ros ip changes, I make sure to give the corrects IPs in the bachrc file and source it. This is not the issue, but thanks for the suggestion though!
-
Voxl_mpa_to_ros@modaltb @Ed-Sutter @tom @Alex-Gardner anyone?
-
Voxl_mpa_to_rosCan someone help me with this? Thanks!
-
Voxl_mpa_to_rosFor some reason, when I do -
roslaunch voxl_mpa_to_ros voxl_mpa_to_ros.launchit doesn't seem to work fully. Here's the output -
voxl:~$ roslaunch voxl_mpa_to_ros voxl_mpa_to_ros.launch ... logging to /home/root/.ros/log/7da4c736-3eb2-11ed-b715-18473db1be57/roslaunch-apq8096-3745.log Checking log directory for disk usage. This may take awhile. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://localhost:57891/ SUMMARY ======== PARAMETERS * /rosdistro: indigo * /rosversion: 1.11.21 NODES / voxl_mpa_to_ros_node (voxl_mpa_to_ros/voxl_mpa_to_ros_node) auto-starting new master process[master]: started with pid [3764] ROS_MASTER_URI=http://localhost:11311 setting /run_id to 7da4c736-3eb2-11ed-b715-18473db1be57 process[rosout-1]: started with pid [3777] started core service [/rosout] process[voxl_mpa_to_ros_node-2]: started with pid [3780] MPA to ROS app is now running Found new interface: qvio_overlay Found new interface: stereo Found new interface: tracking Found new interface: imu1 Found new interface: qvioAnd it stops after this. When I do rostopic list on the other terminal, it says unable to communicate with the Master. My bashrc file is correct with correct ROS_MASTER_IP and ROS_IP. Even rqt says the same thing. I plan to see the output of the camera in the rqt viewer.
-
Hires (M0026) IssueHi @Vinny @modalab could you confirm this RMA process would be without any cost? Please confirm so that I can begin this immediately.
-
Hires (M0026) IssueThanks @Vinny for your response. But do we have to pay the 100$ amount for diagnostic? Since this is under a 3 month product, I believe I just need to fill up the RMA document and just send the board back, right?
-
Hires (M0026) Issue@modalab Okay, but I'm a bit confused here. The Voxl flight deck plus the extension cable plus the hires sensor (M0026) is all new(less than 3 months old). So in the RMA process, do I just need to complete the form and email it and just send the product right? without adding the diagnostic fee in the cart.
-
Hires (M0026) IssueHi @modalab Thanks for your message. I have received one new cable from my previous communication with ModalAI (Since I had ordered 2 cables at the first place). At this point, I'm kinda convinced its not a cable issue. I have replaced cable thrice now, but it's still the same issue. What's even more weird is that, I have a “VOXL only” board with me that I sometimes use if for debugging purposes, and it's working great with this board. I’m able to get the data and also see image stream on rqt. So, this confirms that the cable is not faulty. I also compared the system images of the Voxl flight deck and just the voxl board and they are the same as well i.e 3.3.0. We also have an offshore team working in India who are using same setup (VOXL flight deck + extension cable + M0026 sensor ).
I feel this requires deeper investigation on the voxl side of my board as mentioned by @Vinny . As a matter of fact, even the voxl flight deck that I have is a new one. I'd like to have screen share session and look at this issue together and hopefully we might find a solution there. I already sent an email yesterday regarding the same.
-
Hires (M0026) IssueHi @Vinny , the problem still exists even after trying with a new cable.
-
Hires (M0026) IssueHi @Vinny @modalab curious to know whats the update on here. Is a cable sent out already?
-
Hires (M0026) IssueHi @modalab I received one more email with product has been cancelled notice. Is the replacement cancelled?
-
Hires (M0026) IssueThese are the logs I get when I run journalctl -u voxl-camera-server
-- Logs begin at Thu 1970-01-01 00:00:04 UTC, end at Fri 2022-08-26 15:41:19 UTC. --
Jan 01 00:00:06 apq8096 systemd[1]: Started voxl-camera-server.
-- Logs begin at Thu 1970-01-01 00:00:04 UTC, end at Fri 2022-08-26 15:43:09 UTC. --
Jan 01 00:00:06 apq8096 systemd[1]: Started voxl-camera-server.
Jan 01 00:00:08 apq8096 bash[1959]: ERROR: Camera module not opened, attempting again
Jan 01 00:00:08 apq8096 bash[1959]: ERROR: Camera module not opened, 9 attempts remaining
Jan 01 00:00:10 apq8096 bash[1959]: ------ voxl-camera-server: Camera server is now running
Aug 26 15:43:07 apq8096 bash[1959]: voxl-camera-server ERROR: Error sending request 7958, ErrorCode:
-19
Aug 26 15:43:07 apq8096 bash[1959]: voxl-camera-server FATAL: Recieved Fatal error from camera: trac
king
Aug 26 15:43:07 apq8096 bash[1959]: Camera server will be stopped
Aug 26 15:43:07 apq8096 bash[1959]: ------ voxl-camera-server WARNING: Thread: tracking result threa
d recieved ESTOP
Aug 26 15:43:07 apq8096 bash[1959]: ------ voxl-camera-server WARNING: Thread: hires result thread r
ecieved ESTOP
Aug 26 15:43:08 apq8096 bash[1959]: ------ voxl-camera-server INFO: Camera server is now stopping
Aug 26 15:43:08 apq8096 bash[1959]: There is a chance that it may segfault here, this is a mmqcamera
bug, ignore it
Aug 26 15:43:08 apq8096 bash[1959]: ------ voxl-camera-server INFO: Stopping tracking camera
Aug 26 15:43:09 apq8096 bash[1959]: ------ voxl-camera-server INFO: tracking camera stopped successf
ully
Aug 26 15:43:09 apq8096 bash[1959]: ------ voxl-camera-server INFO: Stopping hires camera
Aug 26 15:43:09 apq8096 bash[1959]: ------ voxl-camera-server INFO: hires camera stopped successfull
y
Aug 26 15:43:09 apq8096 bash[1959]: ------ voxl-camera-server INFO: Camera server exited gracefully -
Hires (M0026) IssueHi @Chad-Sweet the connections are correct. When I put the other way round, I can't even log into VOXL through ssh.
Hi @Vinny No I'm not cascading two cables on to one another. Its just one extension cable. The cable is not folded or anything. I have attached the current connection image.
I'm using the M0036 cable (14.5 cm one). We also have a offshore team in India who are using the same setup, and its been working for them without any issues since months - So I'm sure length cannot be an issue with HIRES config.

-
Hires (M0026) IssueHello, we have a VOXL flight deck with system-image 3.3.0. We have a hires camera (M0026). We are having issues getting the data from the hires camera.
When we do voxl-inspect-cam hires_preview, it gives data for 2-3 seconds and then stops the data, and then we see "server disconnected" on the screen.
size(bytes)| height | width |exposure(ms)| gain | frame id |latency(ms)|Framerate(hz)| format
| 460800 | 480 | 640 | 33.3 | 126 | 16 | 181.0 | 26.9 | NV21^Csize(bytes)| height | width |exposure(ms)| gain | frame id |latency(ms)|Framerate(hz)| format
server disconnectedI also run roslaunch voxl_mpa_to_ros voxl_mpa_to_ros.launch and then echo the topic by "rostopic echo /hires_preview" - I get the data on the screen and then it stops.
The weird part is, just a day before I checked the output from the camera data and I was getting the data perfectly. This morning, it doesn't seem to work and nothing's been changed or touched in between.
Also, this issue is with MIPI extension cable only. When I connect the sensor (M00026) directly to the board, I get the data continously and also verified image in rqt viewer. When I connect the extension cable, then I get this issue. I already replaced the extension cable as I had one spare, and I have been extrememly careful with the extension cable - so I'm sure the cable is not damaged since its a new cable and we are only doing testing right now (not flying the drone).
After running roslaunch voxl_mpa_to_ros voxl_mpa_to_ros.launch - As soon as I do, rostopic echo /hires/image_raw, this is what happens.
MPA to ROS app is now running
Found pipe for interface: tracking, now advertising
Found pipe for interface: hires_preview, now advertising
Found pipe for interface: qvio_overlay, now advertising
Found pipe for interface: dfs_disparity, now advertising
Did not find pipe for interface: tflite,
interface will be idle until its pipe appears
Did not find pipe for interface: stereo,
interface will be idle until its pipe appears
Did not find pipe for interface: tof,
interface will be idle until its pipe appears
Found pipe for interface: imu0, now advertising
Found pipe for interface: imu1, now advertising
Found pipe for interface: qvio, now advertising
Found pipe for interface: dfs_point_cloud, now advertising
Interface hires_preview now publishing
Interface: hires_preview's data pipe disconnected, closing until it returns
Interface: tracking's data pipe disconnected, closing until it returns@modalab @Alex-Gardner @Eric-Katzfey @Matt-Turi
-
Voxl flight deck - issues with flying and powerThanks @Chad-Sweet for your reply. So I did not try the PID method, but instead used a new 3S lipo battery to replicate the previous flight behaviour. The first test was a huge success and the drone flew well even while facing the other sides. But further tests, the power avionics issue has come back again and the tests are now inconsistent. Sometimes it flies well and sometimes its going haywire, but almost getting the avionics power low issue every time.
Could this be the power module issue? Anyway I've ordered power module and my next step is to replace with a new power module and test. But is there anything that you could suggest?
-
Voxl flight deck - issues with flying and power@Chad-Sweet I just replaced my 3S lipo battery with a new 4S lipo battery. I performed sensor calibration as well, just to not leave anything behind. I tried to fly the drone 3 times, although I did not get Avionics power low error, however my drone is going haywire every time I'm trying to fly. In all my 3 tests, I had to quickly use kill switch or else it would have hit something real bad. Also, the one area where my drone was flying perfectly before, it failed even there with bad flight behavior. I made sure I was getting correctly odometry at origin.
-
Voxl flight deck - issues with flying and power@Chad-Sweet thanks for the reply. But the voxl-inspect-battery command inside voxl shows the correct value on the terminal. Also I have a separate external device that gives the voltage of each cell, and it looks correct to me. Could it still be a bad battery?
-
Voxl flight deck - issues with flying and power@Chad-Sweet can't seem to remember, but definitely older then 6-7 months or may be even more, but not sure about that.
-
Voxl flight deck - issues with flying and powerHi, This will be bit of a long post as I'm currently facing bunch of issues.
I'm currently using a voxl-flight-deck enabled drone. My system image is system-image: ModalAI 3.3.0
We have a basic python script that we run to test basic flight using vio, to see our drone flies in various positions. We have been using this for almost a year now, every-time we want to test everything is fine with the drone. From past few days, I'm facing not so consistent issues.1 - The drone is flying properly only if placed in a certain direction. Example, if I place the drone facing south, then the drone flies properly. But as soon as I turn it off and change its direction like facing North, East or West than drone does not fly. To the best of my knowledge all these direction have equally abundant features for VIO to recognize and register the orientation. But drone cease to do so. as soon as I place the drone facing south it operates fine.
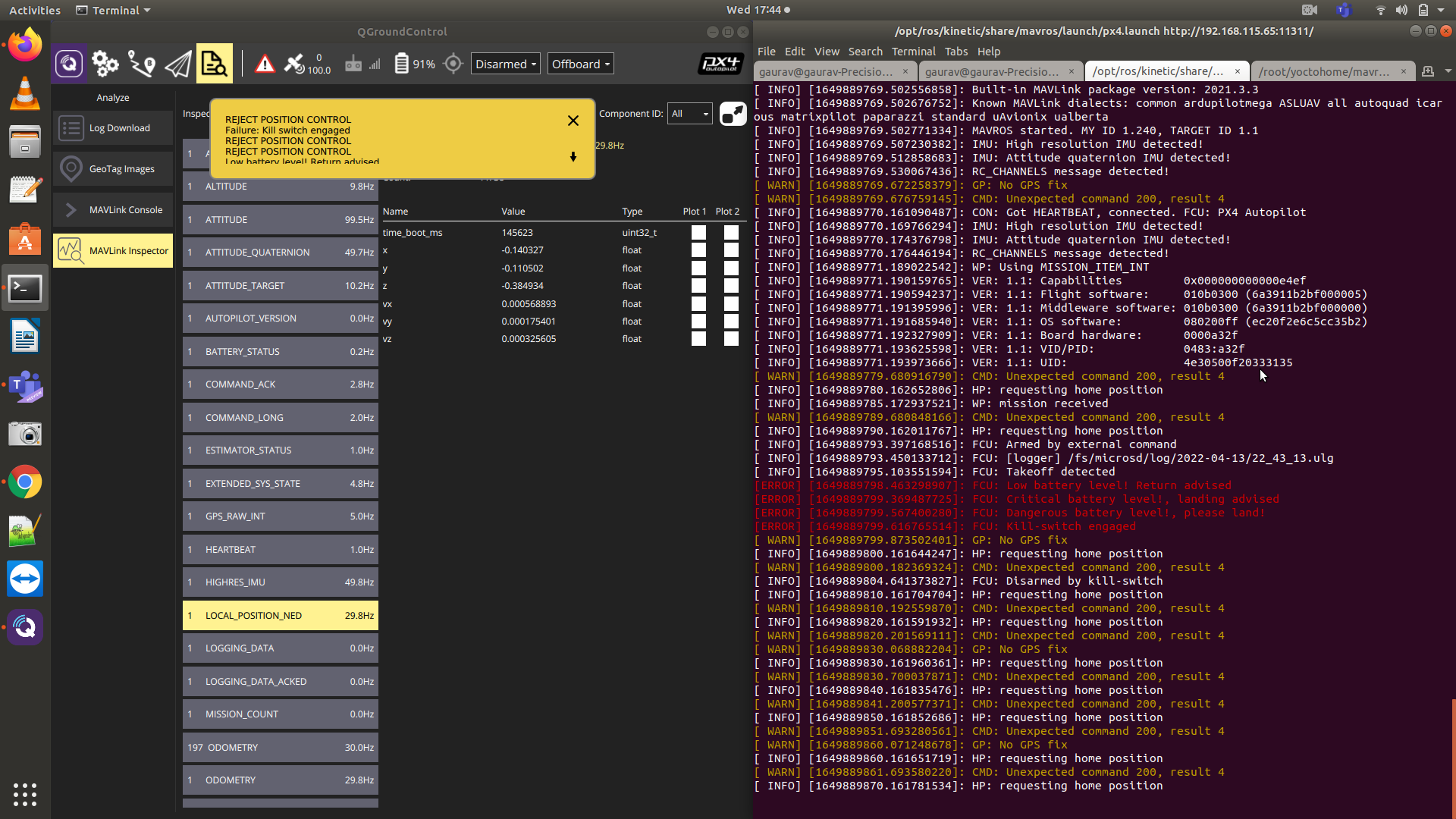
2 - Immediately getting low battery alerts - I'm currently using 3S lipo batteries with 2200 mah capacity. Even though I full charge my battery before testing, as soon as the drone starts flying, QGC starts to report bunch of issues like "Low battery level! Return advised", "Critical battery level, landing advised", "Dangerous battery level, please land". I have attached a screenshot of the same. In the power setup inside QGC, I have set it up the following -
Number of cells(in Series) - 3S
Full Voltage(Per cell) - 4.05
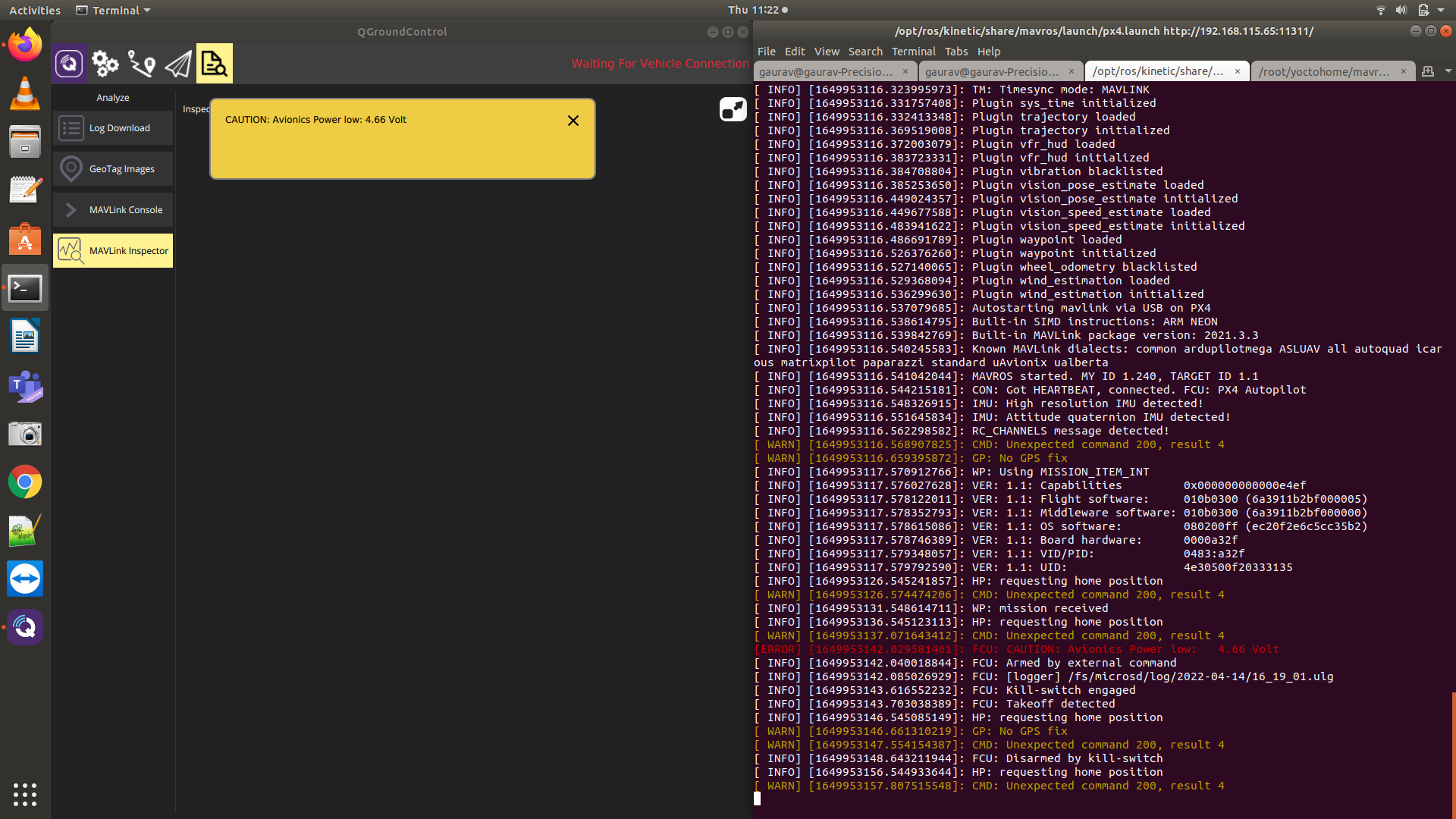
Empty Voltage (Per cell) - 3.503 - Avionics Power low - 4.66 v/4.72V,4.75V - I first got this power avionics problem about 3-4 weeks ago, luckily at that time I replaced the power module with another module (I had extra voxl power module), and that seemed to solve the problem then.
However, since last two days I have again started to face Avionics power low issues.This happened twice yesterday, and then did not. And today after the first unsuccessful flight test, during which time it did not say avionics power low, it again started throwing power avionics problems from the next tests and because of which the motors would spin with very power as if it would go and hit the ceiling. I immediately press kill switch to avoid any accident.Currently these are the issues that I'm facing. Looking forward for getting help on this. Thank you