@planch98 Thank you so much! I have solved the problem.
C
cch
@cch
Posts
-
Stereo interface received non-stereo frame, exiting stereo -
Stereo interface received non-stereo frame, exiting stereoThere is also no 'voxl_mpa_to_ros_node-2*.log' for analyzing:
voxl2:~/.ros/log$ cd 1257f2ae-9f10-11ee-bc6c-00c0cab5947a/ voxl2:~/.ros/log/1257f2ae-9f10-11ee-bc6c-00c0cab5947a$ ls master.log roslaunch-m0054-30807.log rosout-1-stdout.log rosout.log -
Stereo interface received non-stereo frame, exiting stereoHi, I'm using voxl2 with:
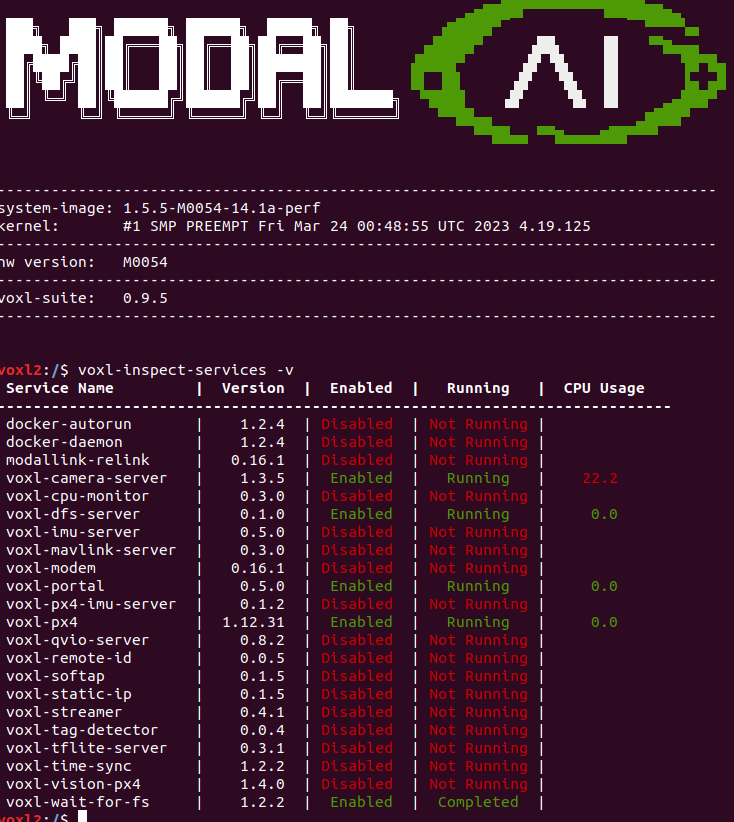
system-image: 1.5.5-M0054-14.1a-perf
kernel: #1 SMP PREEMPT Fri Mar 24 00:48:55 UTC 2023 4.19.125
hw version: M0054
voxl-suite: 0.9.5I'm facing the same problem with Re: [Stereo interface received non-stereo frame](exiting stereo), where the stereo images and the disparity image are shown on voxl-portal. And every thing works fine after launching 'voxl-mpa-to-ros':
voxl2:~/.ros/log/1257f2ae-9f10-11ee-bc6c-00c0cab5947a$ roslaunch voxl_mpa_to_ros voxl_mpa_to_ros.launch ... logging to /home/root/.ros/log/19d7c026-9f16-11ee-86c1-00c0cab5947a/roslaunch-m0054-32592.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://m0054:38073/ SUMMARY ======== PARAMETERS * /rosdistro: melodic * /rosversion: 1.14.13 NODES / voxl_mpa_to_ros_node (voxl_mpa_to_ros/voxl_mpa_to_ros_node) auto-starting new master process[master]: started with pid [32606] ROS_MASTER_URI=http://localhost:11311 setting /run_id to 19d7c026-9f16-11ee-86c1-00c0cab5947a process[rosout-1]: started with pid [32617] started core service [/rosout] process[voxl_mpa_to_ros_node-2]: started with pid [32620] MPA to ROS app is now running Found new interface: stereo Found new interface: stereo_disparity Found new interface: stereo_disparity_scaled Found new interface: stereo_pcI also checked the topic info in another terminal:
voxl2:/$ rostopic list /rosout /rosout_agg /stereo/left /stereo/right /stereo_disparity/left /stereo_disparity/right /stereo_disparity_scaled/left /stereo_disparity_scaled/right /stereo_pc voxl2:/$ rostopic info /stereo/left Type: sensor_msgs/Image Publishers: * /voxl_mpa_to_ros_node (http://m0054:41893/) Subscribers: None voxl2:/$ rostopic info /stereo_disparity/left Type: sensor_msgs/Image Publishers: * /voxl_mpa_to_ros_node (http://m0054:41893/) Subscribers: NoneEverything looks great but a strange thing happens that: 1. If I use 'rostopic echo /stereo/left', the /stereo/left topic is subscribed and shows in terminal 2.If I use 'rostopic echo /stereo_disparity/left', the /stereo_disparity/left topic won't be subscribed and the 'voxl-mpa-to-ros' will crash after announcing that 'Stereo interface received non-stereo frame, exiting stereo':
voxl2:~/.ros/log/1257f2ae-9f10-11ee-bc6c-00c0cab5947a$ roslaunch voxl_mpa_to_ros voxl_mpa_to_ros.launch ... logging to /home/root/.ros/log/fafd37b2-9f15-11ee-bc54-00c0cab5947a/roslaunch-m0054-31666.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://m0054:36119/ SUMMARY ======== PARAMETERS * /rosdistro: melodic * /rosversion: 1.14.13 NODES / voxl_mpa_to_ros_node (voxl_mpa_to_ros/voxl_mpa_to_ros_node) auto-starting new master process[master]: started with pid [31680] ROS_MASTER_URI=http://localhost:11311 setting /run_id to fafd37b2-9f15-11ee-bc54-00c0cab5947a process[rosout-1]: started with pid [31691] started core service [/rosout] process[voxl_mpa_to_ros_node-2]: started with pid [31694] MPA to ROS app is now running Found new interface: stereo Found new interface: stereo_disparity Found new interface: stereo_disparity_scaled Found new interface: stereo_pc Interface stereo_disparity now publishing Stereo interface received non-stereo frame, exiting stereo [voxl_mpa_to_ros_node-2] process has died [pid 31694, exit code -11, cmd /opt/ros/melodic/lib/voxl_mpa_to_ros/voxl_mpa_to_ros_node __name:=voxl_mpa_to_ros_node __log:=/home/root/.ros/log/fafd37b2-9f15-11ee-bc54-00c0cab5947a/voxl_mpa_to_ros_node-2.log]. log file: /home/root/.ros/log/fafd37b2-9f15-11ee-bc54-00c0cab5947a/voxl_mpa_to_ros_node-2*.log ^C[rosout-1] killing on exit [master] killing on exit shutting down processing monitor... ... shutting down processing monitor complete doneI tried several times after rebooting voxl2. And I also tried to flash sdk 0.9.5 or turn off the voxl-portal. But I get the same result every time. It's hard to explain why this happens as the /stereo/left has the same type compared with /stereo_disparity/left, however, the /stereo/left can be subscribed but the /stereo_disparity/left can't.
Any clue on what is going on?
-
Get depth from dfs@planch98 Have you ever tried to calibrate the camera again to see if the parameters have changed? After calibrating the stereo camera several times, I found that the wrong parameters could be obtained due to inputting the wrong width of the chessboard. By the way, could you please give some suggestions on this issue link text?
-
voxl-camera-server & voxl-dfs-server problemHi,
This is an extension topic from the unsolved problem link text. I have checked the voxl-camera-server and find some problems:
Terminal output 1:
system-image: 1.5.5-M0054-14.1a-perf kernel: #1 SMP PREEMPT Fri Mar 24 00:48:55 UTC 2023 4.19.125 -------------------------------------------------------------------------------- hw version: M0054 -------------------------------------------------------------------------------- voxl-suite: 0.9.5 -------------------------------------------------------------------------------- voxl2:/$ voxl-inspect-services Service Name | Enabled | Running | CPU Usage --------------------------------------------------------------- docker-autorun | Disabled | Not Running | docker-daemon | Disabled | Not Running | modallink-relink | Disabled | Not Running | voxl-camera-server | Enabled | Running | 0.0 voxl-cpu-monitor | Disabled | Not Running | voxl-dfs-server | Enabled | Running | 0.0 voxl-imu-server | Enabled | Running | 0.0 voxl-mavlink-server | Disabled | Not Running | voxl-modem | Disabled | Not Running | voxl-portal | Enabled | Running | 0.0 voxl-px4-imu-server | Disabled | Not Running | voxl-px4 | Enabled | Running | 0.0 voxl-qvio-server | Disabled | Not Running | voxl-remote-id | Disabled | Not Running | voxl-softap | Disabled | Not Running | voxl-static-ip | Disabled | Not Running | voxl-streamer | Disabled | Not Running | voxl-tag-detector | Disabled | Not Running | voxl-tflite-server | Disabled | Not Running | voxl-time-sync | Disabled | Not Running | voxl-vision-px4 | Disabled | Not Running | voxl-wait-for-fs | Enabled | Completed | voxl2:/$ systemctl status voxl-camera-server ● voxl-camera-server.service - voxl-camera-server Loaded: loaded (/usr/bin/voxl-camera-server; enabled; vendor preset: enabled) Active: failed (Result: signal) since Mon 2023-11-06 08:52:53 UTC; 45s ago Process: 1403 ExecStart=/bin/bash -c /usr/bin/voxl-camera-server (code=killed, Main PID: 1403 (code=killed, signal=ABRT) Nov 06 08:52:17 m0054 systemd[1]: Started voxl-camera-server. Nov 06 08:52:20 m0054 bash[1403]: ------ voxl-camera-server: Camera server is no Nov 06 08:52:20 m0054 bash[1403]: WARNING: Camera stereo recieved much newer mas Nov 06 08:52:53 m0054 systemd[1]: voxl-camera-server.service: Main process exite Nov 06 08:52:53 m0054 systemd[1]: voxl-camera-server.service: Failed with result voxl2:/$ voxl-inspect-services Service Name | Enabled | Running | CPU Usage --------------------------------------------------------------- docker-autorun | Disabled | Not Running | docker-daemon | Disabled | Not Running | modallink-relink | Disabled | Not Running | voxl-camera-server | Enabled | Not Running | voxl-cpu-monitor | Disabled | Not Running | voxl-dfs-server | Enabled | Running | 0.0 voxl-imu-server | Enabled | Running | 0.0 voxl-mavlink-server | Disabled | Not Running | voxl-modem | Disabled | Not Running | voxl-portal | Enabled | Running | 0.0 voxl-px4-imu-server | Disabled | Not Running | voxl-px4 | Enabled | Running | 0.0 voxl-qvio-server | Disabled | Not Running | voxl-remote-id | Disabled | Not Running | voxl-softap | Disabled | Not Running | voxl-static-ip | Disabled | Not Running | voxl-streamer | Disabled | Not Running | voxl-tag-detector | Disabled | Not Running | voxl-tflite-server | Disabled | Not Running | voxl-time-sync | Disabled | Not Running | voxl-vision-px4 | Disabled | Not Running | voxl-wait-for-fs | Enabled | Completed | voxl2:/$ voxl-camera-server ------ voxl-camera-server: Camera server is now running WARNING: Camera stereo recieved much newer master than child (33), discarding child and trying again ^C received SIGINT Ctrl-C ------ voxl-camera-server INFO: Camera server is now stopping ------ voxl-camera-server INFO: Camera server exited gracefully voxl2:/$ systemctl start voxl-camera-server voxl2:/$ systemctl status voxl-camera-server ● voxl-camera-server.service - voxl-camera-server Loaded: loaded (/usr/bin/voxl-camera-server; enabled; vendor preset: enabled) Active: active (running) since Mon 2023-11-06 08:56:29 UTC; 6s ago Main PID: 2529 (voxl-camera-ser) Tasks: 21 (limit: 4915) CGroup: /system.slice/voxl-camera-server.service └─2529 /usr/bin/voxl-camera-server Nov 06 08:56:29 m0054 systemd[1]: Started voxl-camera-server. Nov 06 08:56:33 m0054 bash[2529]: ------ voxl-camera-server: Camera server is no Nov 06 08:56:33 m0054 bash[2529]: WARNING: Camera stereo recieved much newer mas lines 1-11/11 (END) voxl2:/$ systemctl status voxl-dfs-server ● voxl-dfs-server.service - voxl-dfs-server Loaded: loaded (/usr/bin/voxl-dfs-server; enabled; vendor preset: enabled) Active: active (running) since Mon 2023-11-06 08:52:17 UTC; 4min 29s ago Main PID: 1405 (voxl-dfs-server) Tasks: 14 (limit: 4915) CGroup: /system.slice/voxl-dfs-server.service └─1405 /usr/bin/voxl-dfs-server Nov 06 08:52:17 m0054 systemd[1]: Started voxl-dfs-server.After this, I immediately checked the MPA output through 'voxl-inspect-cam -a' and get:
Terminal output 2:
| Pipe Name |size(bytes)| height | width |exposure(ms)| gat | stereo | 614400 | 480 | 640 | 4.69 | 8 | stereo_front_disparity | | stereo_front_disparity_scaled |which means the dfs-server still doesn't work. I wonder if the problem happens in voxl-camera-server because from the Terminal output 1 :
voxl2:/$ voxl-camera-server ------ voxl-camera-server: Camera server is now running WARNING: Camera stereo recieved much newer master than child (33), discarding child and trying againIs the biggest problem from 'WARNING: Camera stereo recieved much newer master than child (33), discarding child and trying again' or somewhere else?
-
Voxl 2 DFS Server failedCan anybody find out the problems? Many thanks.
-
Voxl 2 DFS Server failed@tom Here are the full outputs:
-------------------------------------------------------------------------------- system-image: 1.5.5-M0054-14.1a-perf kernel: #1 SMP PREEMPT Fri Mar 24 00:48:55 UTC 2023 4.19.125 -------------------------------------------------------------------------------- hw version: M0054 -------------------------------------------------------------------------------- voxl-suite: 0.9.5 -------------------------------------------------------------------------------- voxl2:/$ voxl-inspect-services Service Name | Enabled | Running | CPU Usage --------------------------------------------------------------- docker-autorun | Disabled | Not Running | docker-daemon | Disabled | Not Running | modallink-relink | Disabled | Not Running | voxl-camera-server | Enabled | Running | 55.0 voxl-cpu-monitor | Disabled | Not Running | voxl-dfs-server | Enabled | Running | 0.0 voxl-imu-server | Enabled | Running | 0.0 voxl-mavlink-server | Disabled | Not Running | voxl-modem | Disabled | Not Running | voxl-portal | Enabled | Running | 0.0 voxl-px4-imu-server | Disabled | Not Running | voxl-px4 | Enabled | Running | 0.0 voxl-qvio-server | Disabled | Not Running | voxl-remote-id | Disabled | Not Running | voxl-softap | Disabled | Not Running | voxl-static-ip | Disabled | Not Running | voxl-streamer | Disabled | Not Running | voxl-tag-detector | Disabled | Not Running | voxl-tflite-server | Disabled | Not Running | voxl-time-sync | Disabled | Not Running | voxl-vision-px4 | Disabled | Not Running | voxl-wait-for-fs | Enabled | Completed | voxl2:/$ systemctl status voxl-dfs-server ● voxl-dfs-server.service - voxl-dfs-server Loaded: loaded (/usr/bin/voxl-dfs-server; enabled; vendor preset: enabled) Active: active (running) since Thu 2023-11-02 13:19:52 UTC; 18h ago Main PID: 1425 (voxl-dfs-server) Tasks: 14 (limit: 4915) CGroup: /system.slice/voxl-dfs-server.service └─1425 /usr/bin/voxl-dfs-server Nov 02 13:19:52 m0054 systemd[1]: Started voxl-dfs-server. -
Voxl 2 DFS Server failed@Eric-Katzfey Thanks. I tried again but got the same result, could you please help me check out if there are other problems? Here are the steps I followed:
- power up the voxl2
- open up a terminal and check 'voxl-inspect-services':
voxl2:/$ voxl-inspect-services Service Name | Enabled | Running | CPU Usage --------------------------------------------------------------- docker-autorun | Disabled | Not Running | docker-daemon | Disabled | Not Running | modallink-relink | Disabled | Not Running | voxl-camera-server | Enabled | Running | 36.4 voxl-cpu-monitor | Disabled | Not Running | voxl-dfs-server | Enabled | Running | 0.0 voxl-imu-server | Enabled | Running | 0.0 voxl-mavlink-server | Disabled | Not Running | voxl-modem | Disabled | Not Running | voxl-portal | Enabled | Running | 0.0 voxl-px4-imu-server | Disabled | Not Running | voxl-px4 | Enabled | Running | 0.0 voxl-qvio-server | Disabled | Not Running | voxl-remote-id | Disabled | Not Running | voxl-softap | Disabled | Not Running | voxl-static-ip | Disabled | Not Running | voxl-streamer | Disabled | Not Running | voxl-tag-detector | Disabled | Not Running | voxl-tflite-server | Disabled | Not Running | voxl-time-sync | Disabled | Not Running | voxl-vision-px4 | Disabled | Not Running | voxl-wait-for-fs | Enabled | Completed |- open up a web and check the output of voxl-portal:
- check 'voxl-inspect-services' again:
voxl2:/$ voxl-inspect-services Service Name | Enabled | Running | CPU Usage --------------------------------------------------------------- docker-autorun | Disabled | Not Running | docker-daemon | Disabled | Not Running | modallink-relink | Disabled | Not Running | voxl-camera-server | Enabled | Running | 47.6 voxl-cpu-monitor | Disabled | Not Running | voxl-dfs-server | Enabled | Running | 0.0 voxl-imu-server | Enabled | Running | 0.0 voxl-mavlink-server | Disabled | Not Running | voxl-modem | Disabled | Not Running | voxl-portal | Enabled | Running | 0.0 voxl-px4-imu-server | Disabled | Not Running | voxl-px4 | Enabled | Running | 0.0 voxl-qvio-server | Disabled | Not Running | voxl-remote-id | Disabled | Not Running | voxl-softap | Disabled | Not Running | voxl-static-ip | Disabled | Not Running | voxl-streamer | Disabled | Not Running | voxl-tag-detector | Disabled | Not Running | voxl-tflite-server | Disabled | Not Running | voxl-time-sync | Disabled | Not Running | voxl-vision-px4 | Disabled | Not Running | voxl-wait-for-fs | Enabled | Completed |I'm so confused because there is no error showing up from anywhere.
-
Voxl 2 DFS Server failedHi, I'm using voxl2 SDK 0.9.5. Follow these steps:
1.Use exit to get out of the shell and adb reboot to restart your VOXL2
2.Once the device restarts, use adb shell to access the terminal and then use voxl-camera-server to start the camera server manually
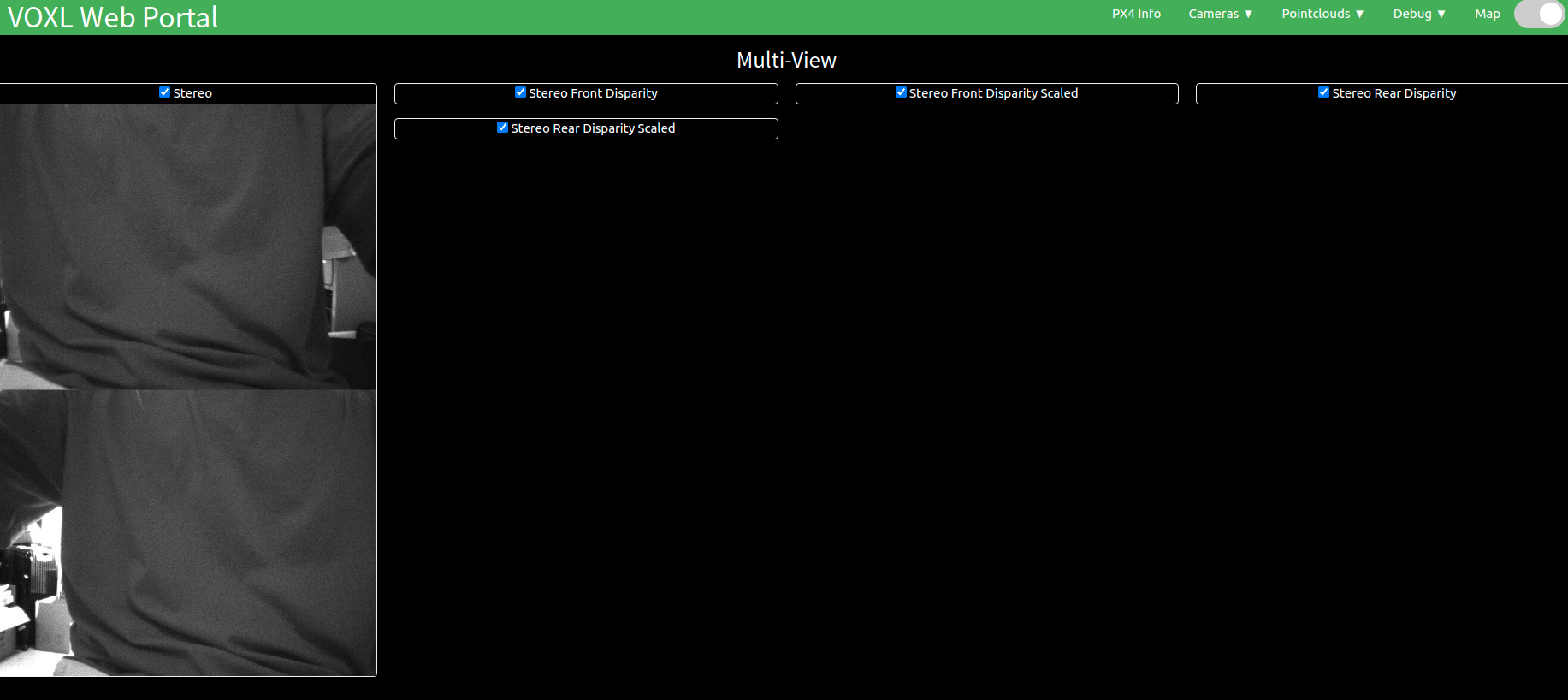
3.In a web browser access VOXL Portal as you have been. You should be able to see the stereo camera output.
4.In another terminal, use adb shell to access the terminal and then use voxl-dfs-server to launch the DFS Server.
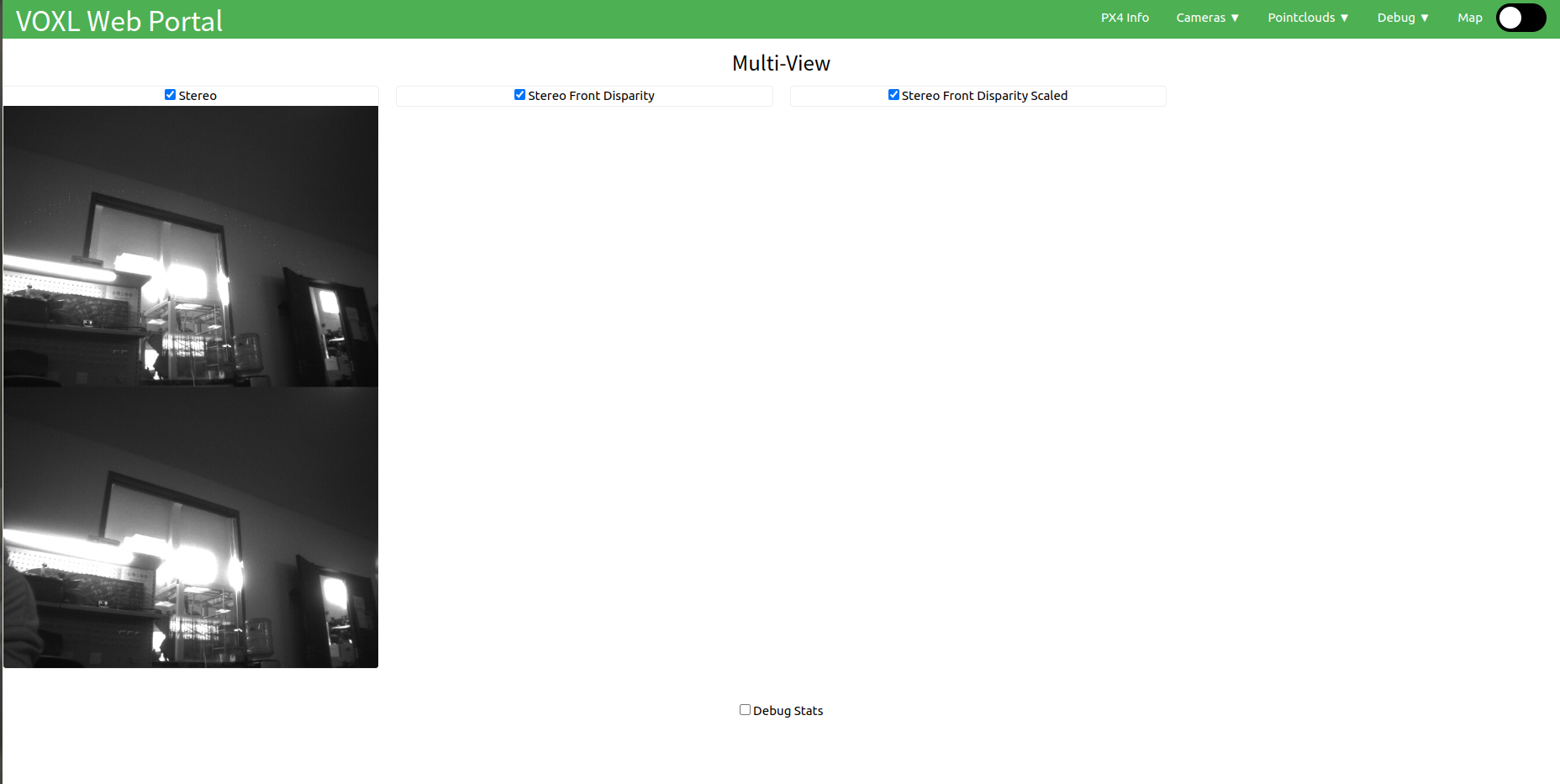
I can't see 'stereo front disparity', 'stereo front disparity scaled' or 'pointcloud pc' from voxl-portal:

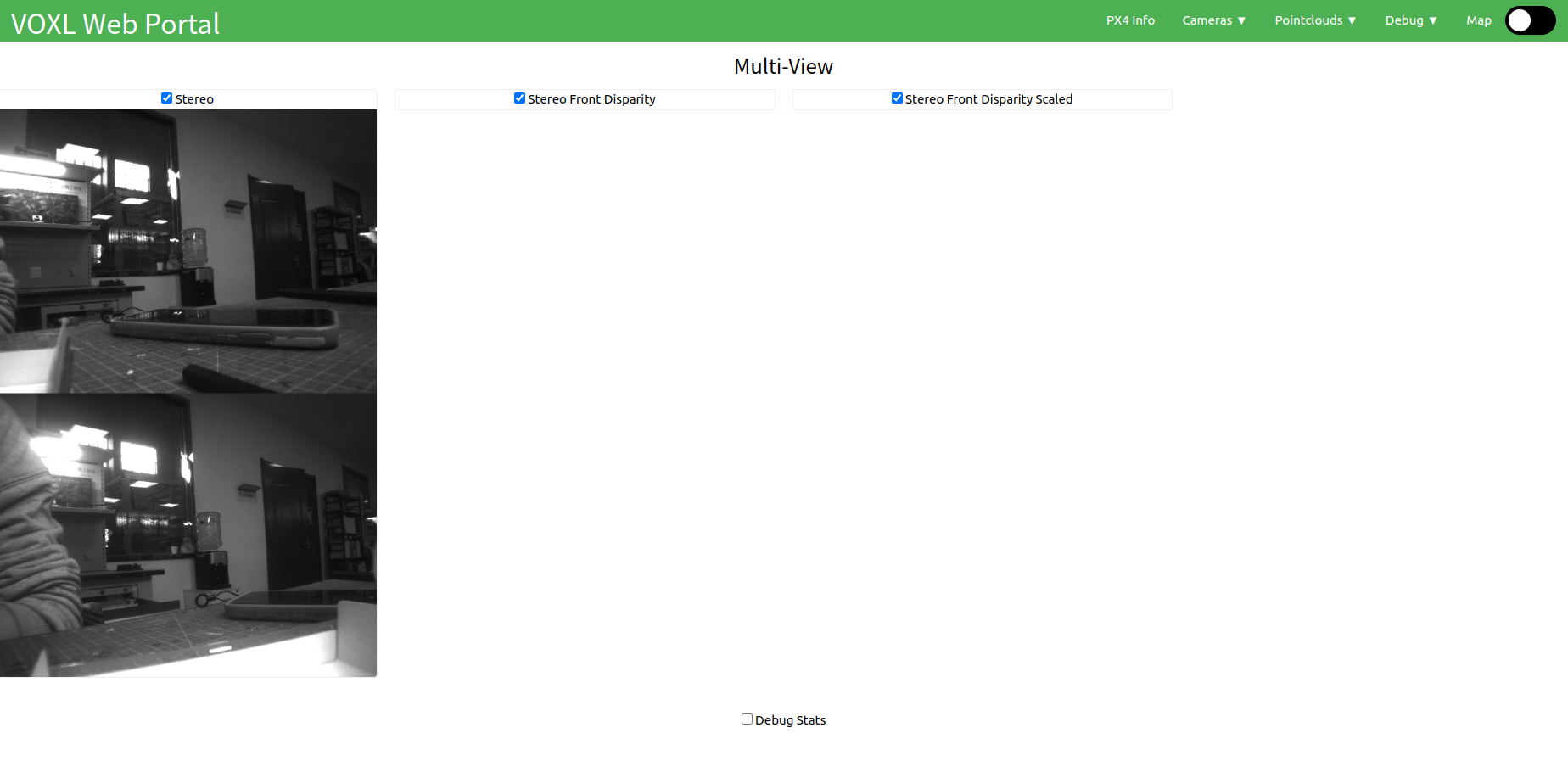 image url)
image url)Terminal output:
Terminal 1:
voxl2:/$ voxl-inspect-services Service Name | Enabled | Running | CPU Usage --------------------------------------------------------------- docker-autorun | Disabled | Not Running | docker-daemon | Disabled | Not Running | modallink-relink | Disabled | Not Running | voxl-camera-server | Enabled | Not Running | voxl-cpu-monitor | Disabled | Not Running | voxl-dfs-server | Enabled | Running | 0.0 voxl-imu-server | Enabled | Running | 0.0 voxl-mavlink-server | Disabled | Not Running | voxl-modem | Disabled | Not Running | voxl-portal | Enabled | Running | 0.0 voxl-px4-imu-server | Disabled | Not Running | voxl-px4 | Enabled | Running | 0.0 voxl-qvio-server | Disabled | Not Running | voxl-remote-id | Disabled | Not Running | voxl-softap | Disabled | Not Running | voxl-static-ip | Disabled | Not Running | voxl-streamer | Disabled | Not Running | voxl-tag-detector | Disabled | Not Running | voxl-tflite-server | Disabled | Not Running | voxl-time-sync | Disabled | Not Running | voxl-vision-px4 | Disabled | Not Running | voxl-wait-for-fs | Enabled | Completed | voxl2:/$ voxl-camera-server ------ voxl-camera-server: Camera server is now running WARNING: Camera stereo recieved much newer master than child (33), discarding child and trying againTerminal 2:
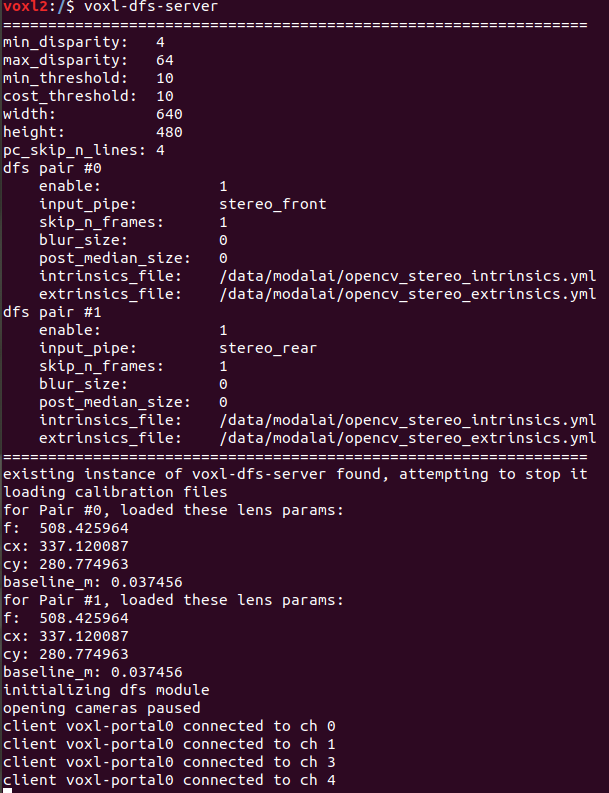
-------------------------------------------------------------------------------- system-image: 1.5.5-M0054-14.1a-perf kernel: #1 SMP PREEMPT Fri Mar 24 00:48:55 UTC 2023 4.19.125 -------------------------------------------------------------------------------- hw version: M0054 -------------------------------------------------------------------------------- voxl-suite: 0.9.5 -------------------------------------------------------------------------------- voxl2:/$ voxl-dfs-server ================================================================= min_disparity: 4 max_disparity: 64 min_threshold: 10 cost_threshold: 10 width: 640 height: 480 pc_skip_n_lines: 4 dfs pair #0 enable: 1 input_pipe: stereo_front skip_n_frames: 1 blur_size: 0 post_median_size: 0 intrinsics_file: /data/modalai/opencv_stereo_front_intrinsics.yml extrinsics_file: /data/modalai/opencv_stereo_front_extrinsics.yml dfs pair #1 enable: 0 input_pipe: stereo_rear skip_n_frames: 1 blur_size: 0 post_median_size: 0 intrinsics_file: /data/modalai/opencv_stereo_rear_intrinsics.yml extrinsics_file: /data/modalai/opencv_stereo_rear_extrinsics.yml ================================================================= existing instance of voxl-dfs-server found, attempting to stop it loading calibration files for Pair #0, loaded these lens params: f: 508.425964 cx: 337.120087 cy: 280.774963 baseline_m: 0.037456 initializing dfs module opening cameras paused client voxl-portal0 connected to ch 1 client voxl-portal0 connected to ch 0 client voxl-portal0 connected to ch 2 client voxl-portal0 connected to ch 2Terminal 3:
voxl2:/$ voxl-inspect-services Service Name | Enabled | Running | CPU Usage --------------------------------------------------------------- docker-autorun | Disabled | Not Running | docker-daemon | Disabled | Not Running | modallink-relink | Disabled | Not Running | voxl-camera-server | Enabled | Not Running | voxl-cpu-monitor | Disabled | Not Running | voxl-dfs-server | Enabled | Not Running | voxl-imu-server | Enabled | Running | 0.0 voxl-mavlink-server | Disabled | Not Running | voxl-modem | Disabled | Not Running | voxl-portal | Enabled | Running | 30.0 voxl-px4-imu-server | Disabled | Not Running | voxl-px4 | Enabled | Running | 0.0 voxl-qvio-server | Disabled | Not Running | voxl-remote-id | Disabled | Not Running | voxl-softap | Disabled | Not Running | voxl-static-ip | Disabled | Not Running | voxl-streamer | Disabled | Not Running | voxl-tag-detector | Disabled | Not Running | voxl-tflite-server | Disabled | Not Running | voxl-time-sync | Disabled | Not Running | voxl-vision-px4 | Disabled | Not Running | voxl-wait-for-fs | Enabled | Completed | -
voxl-dfs-server running but no disparity map show in voxl-portal@afdrus No I haven't.

-
voxl-dfs-server running but no disparity shows in voxl-portalHi,
I'm new for voxl 2, hope someone can help me.
Followed the doc, I have done stereo calibration and voxl-dfs-config settings, but when I try to see the disparity, voxl-portal show nothing.
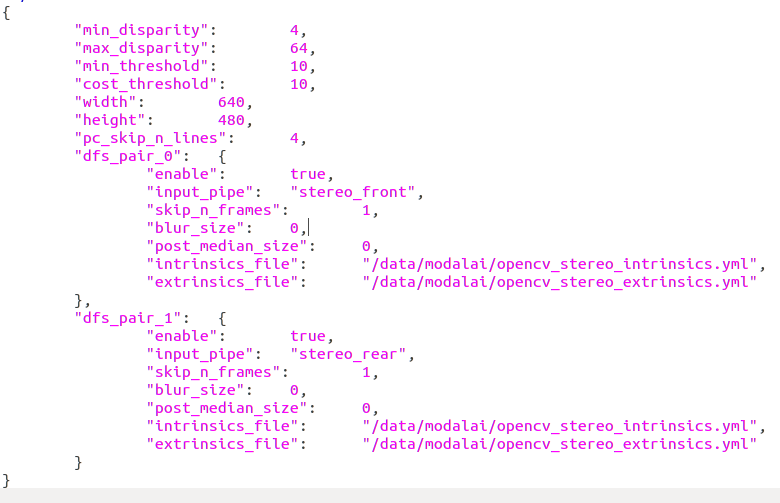
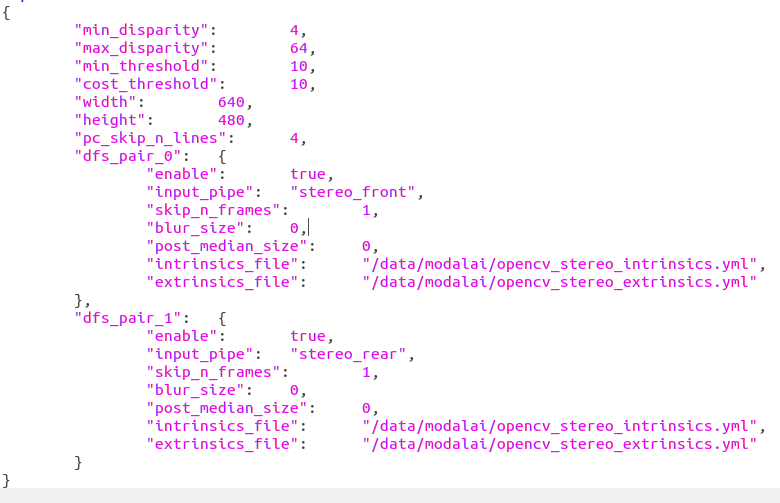
show my etc/modalai/voxl-dfs-server.conf:
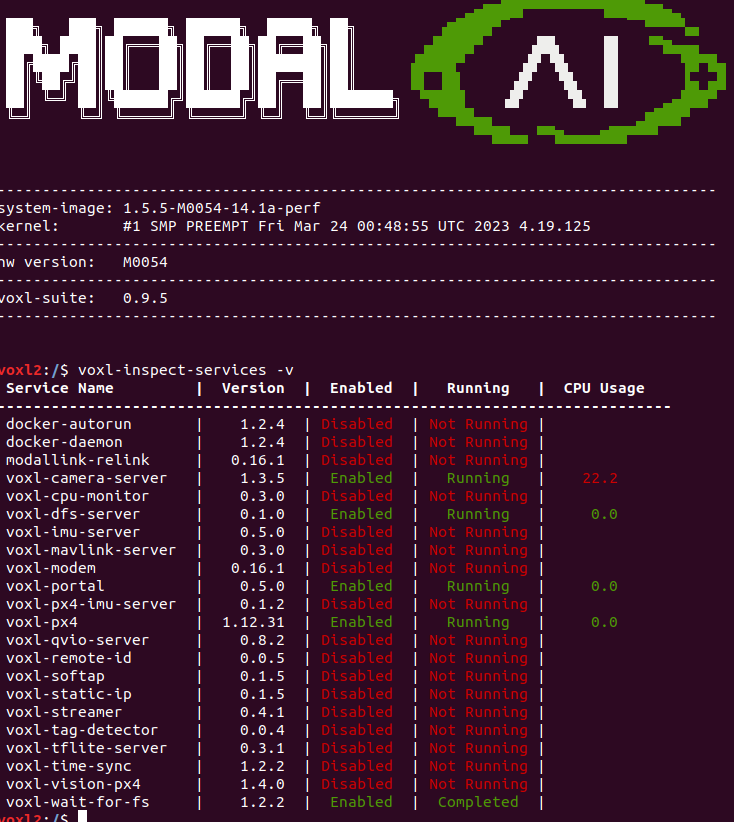
I check the voxl-inspect-services:
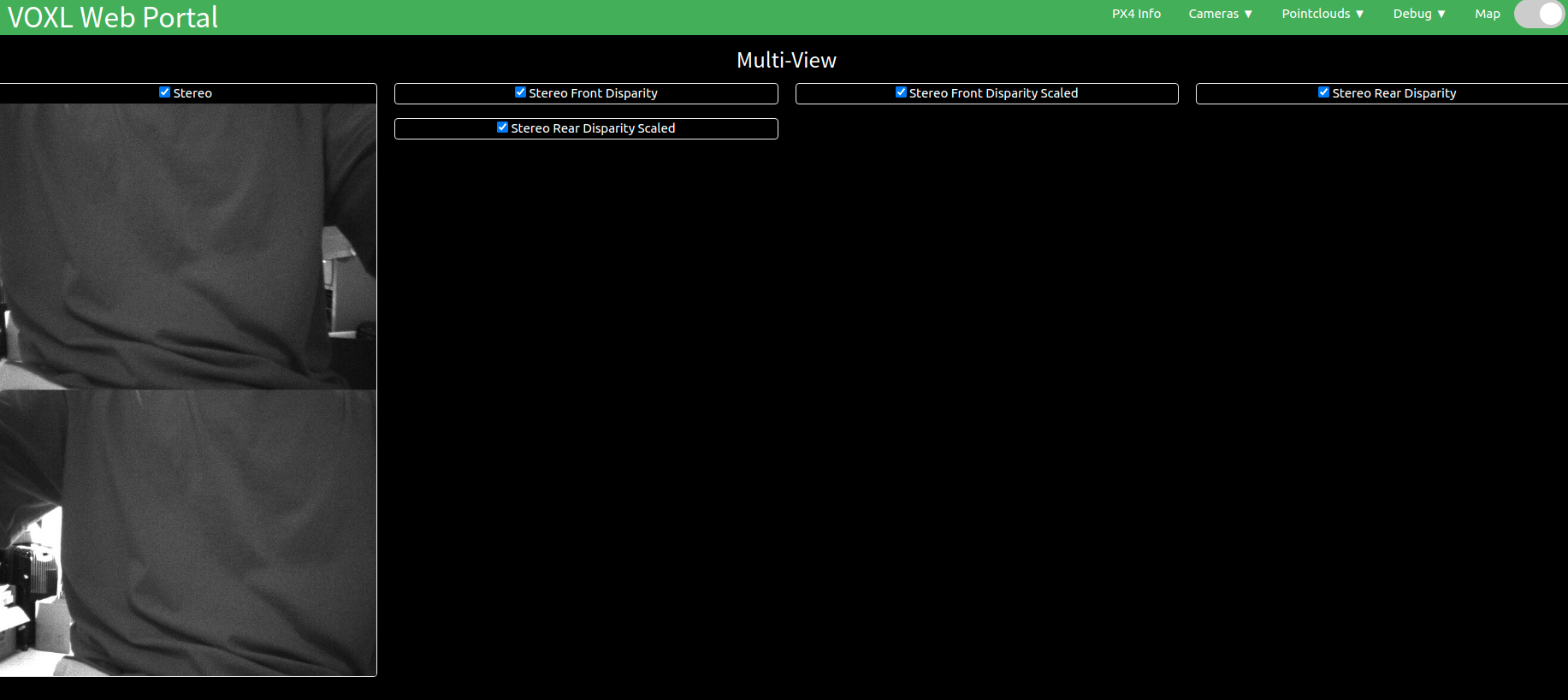
But voxl-portal shows nothing:
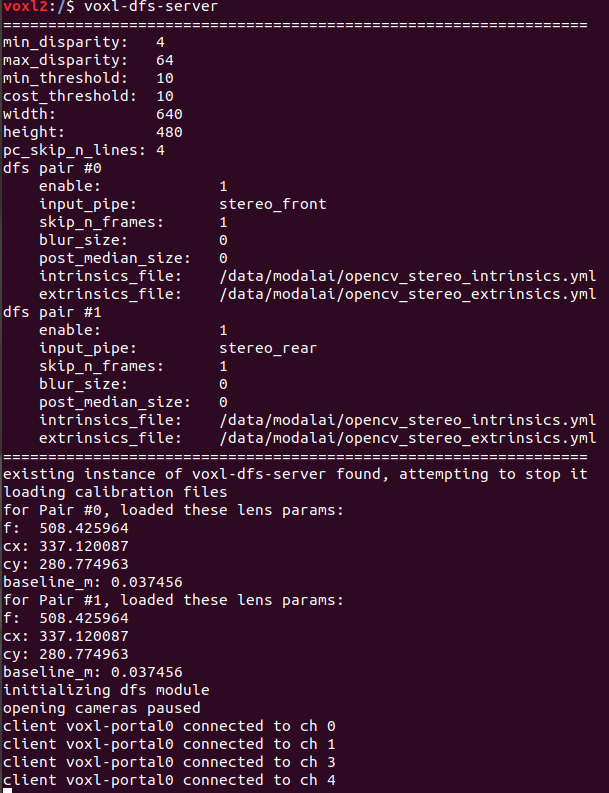
Run voxl-dfs-server:
falseI have also tried to set 'dfs_pair_0 to false' and dfs_pair_1 to false' in etc/modalai/voxl-dfs-server.conf separately. But got the same result.
-
voxl-dfs-server running but no disparity map show in voxl-portalI have also tried to set 'dfs_pair_0 to false' and dfs_pair_1 to false' in etc/modalai/voxl-dfs-server.conf separately. But got the same result.
-
voxl-dfs-server running but no disparity map show in voxl-portalHi dev team,
I have done stereo calibration and voxl-dfs-config settings, but when I try to see the disparity map, voxl-portal show nothing.
show my etc/modalai/voxl-dfs-server.conf:
I check the voxl-inspect-services:
But voxl-portal shows nothing:
Run voxl-dfs-server:
I have also tried to set 'dfs_pair_0 to false' and dfs_pair_1 to false' in etc/modalai/voxl-dfs-server.conf. But got the same result.
How do I fix it? -
voxl-portal start up error@tom Thanks a lot! I can start up voxl-portal now.
-
voxl-portal start up errorI just got my voxl2 a few days ago. But when I'm trying to open up the voxl-camera-serve, I got an error.
And also, I can't open the voxl-portal and I'm confused by the tutorial video showing that voxl2 had turned on the voxl-portal automatically. I wonder if there is something not installed. Could someone please tell me the right way to handle it?Show my terminal info here:
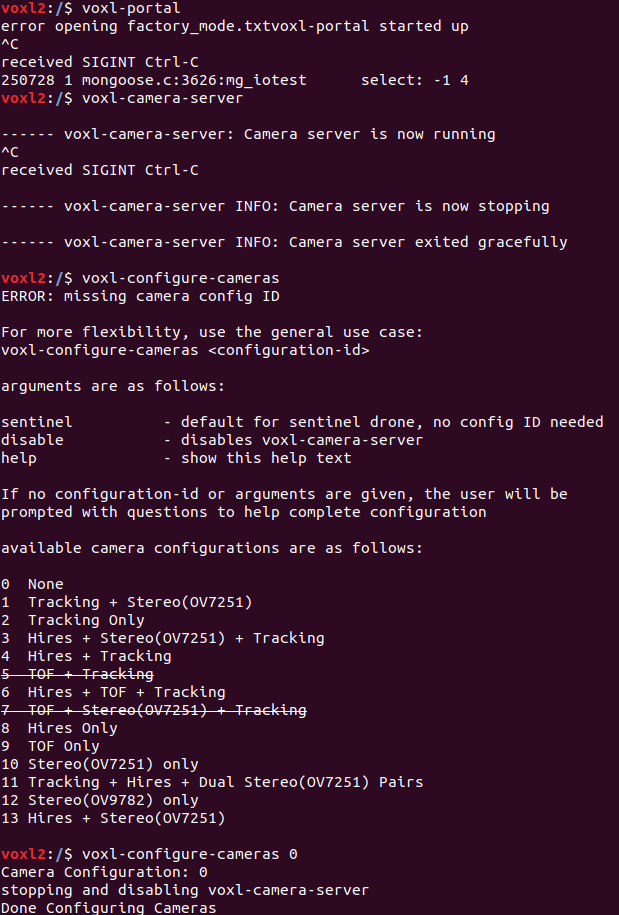

And my devices connected to voxl2: