From the image in voxl-mapper gitlab, https://gitlab.com/voxl-public/voxl-sdk/services/voxl-mapper/-/raw/master/images/path_plan.png, it can be seen that voxl-portal shows the drone trajectory to the goal point.
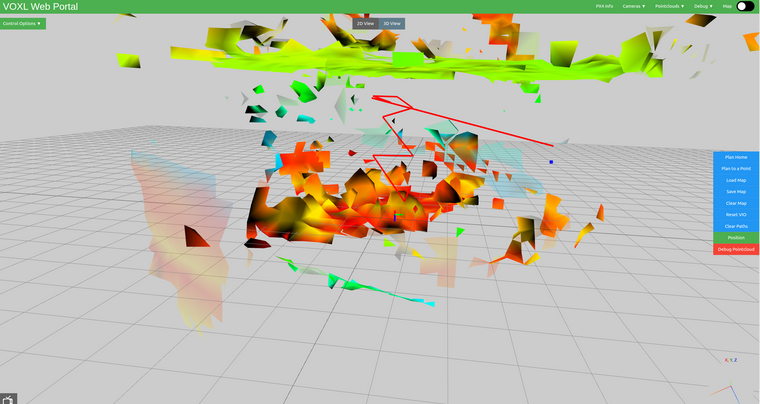
But while doing the same in voxl-portal v0.3.3 by means of voxl-mapper v0.1.5, no such trajectories (red and blue lines) is being shown even though the rrt calculation is being done:
voxl:~$ voxl-mapper
Loading our own config file
Loading extrinsics config file
Trying to init tsdf server
created tsdf server
waiting for server at /run/mpa/vvpx4_body_wrt_fixed/
waiting for server at /run/mpa/tof
Connected to VIO server
Initializing ESDF structs
Connected to depth pipe
ERROR fetching tf from tf ringbuffer
there wasn't sufficient data in the buffer
Client requested plan to location
msg plan_to
goal str 0.9140511155128479,1.140061616897583,0
Using start pose of: x: -0.04, y: -0.06, z: -0.02
Using goal pose of: x: 0.91, y: 1.14, z: 0.00
Starting RRTConnect planner
ERROR: End point is in collision
Client requested plan to location
msg plan_to
goal str -1.0398440317492224,-1.0579751735630827,-0.529482705573
Using start pose of: x: -0.02, y: -0.07, z: -0.02
Using goal pose of: x: -1.04, y: -1.06, z: -0.53
Starting RRTConnect planner
RRT solution found in 2.85ms and took 800 attempts with 218 in tree
Starting Informed RRT*
Improved RRT solution found in 200.03ms and took 21692 attempts with 2223 in tree
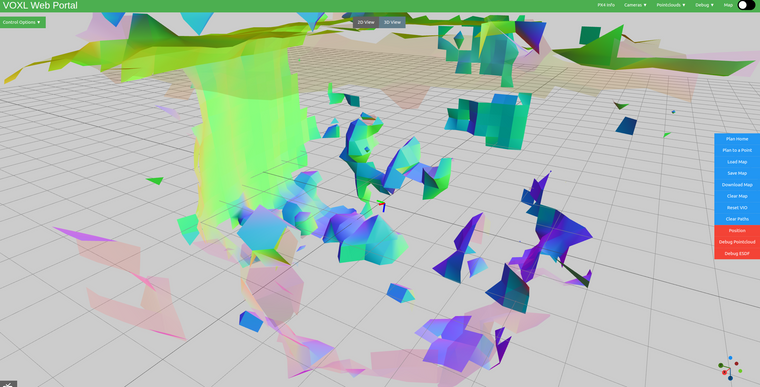
Selecting the goal point
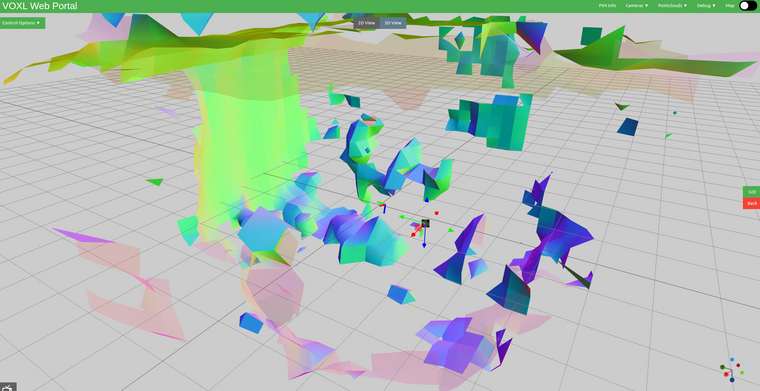
No trajectory is being shown in voxl-mapper after selecting Go
My voxl-mapper conf
{
"tof_pipe_0": "/run/mpa/tof",
"tof_0_enable": true,
"tof_0_rate": 10,
"tof_extrinsics_0_name": "tof",
"tof_1_pipe": "/run/mpa/tof",
"tof_1_enable": false,
"tof_1_rate": 10,
"tof_extrinsics_1_name": "tof",
"tof_2_pipe": "/run/mpa/tof",
"tof_2_enable": false,
"tof_2_rate": 10,
"tof_extrinsics_2_name": "tof",
"tof_3_pipe": "/run/mpa/tof",
"tof_3_enable": false,
"tof_3_rate": 10,
"tof_extrinsics_3_name": "tof",
"depth_pipe_0": "/run/mpa/dfs_point_cloud",
"depth_pipe_0_enable": false,
"extrinsics0_name": "stereo_l",
"depth0_rate": 10,
"depth_pipe_1": "/run/mpa/stereo_front_pc",
"depth_pipe_1_enable": false,
"extrinsics1_name": "stereo_front_l",
"depth1_rate": 10,
"depth_pipe_2": "/run/mpa/stereo_rear_pc",
"depth_pipe_2_enable": false,
"extrinsics2_name": "stereo_rear_l",
"depth2_rate": 10,
"depth_pipe_3": "/run/mpa/dfs_point_cloud",
"depth_pipe_3_enable": false,
"extrinsics3_name": "stereo_l",
"depth3_rate": 10,
"robot_radius": 0.300000011920929,
"voxel_size": 0.20000000298023224,
"voxels_per_side": 16,
"esdf_save_path": "/data/voxl-mapper/esdf_map",
"tsdf_save_path": "/data/voxl-mapper/tsdf_map",
"mesh_save_path": "/data/voxl-mapper/mesh",
"esdf_max_distance": 2,
"esdf_min_distance": 0.10000000149011612,
"esdf_default_distance": 1,
"esdf_inner_sphere_radius": 0.20000000298023224,
"esdf_outer_sphere_radius": 0.600000023841858,
"rrt_min_distance": 0.20000000298023224,
"rrt_max_runtime_nanoseconds": 1000000000,
"rrt_goal_threshold": 0.05000000074505806,
"rrt_prune_iterations": 100,
"rrt_send_tree": false,
"treat_unknown_as_occupied": true,
"loco_num_segments": 10,
"loco_smoothness_cost_weight": 0.1,
"loco_collision_cost_weight": 10,
"loco_waypoint_cost_weight": 1,
"loco_min_collision_sampling_dist": 0.1,
"loco_add_waypoints": false,
"loco_scale_time": true,
"loco_split_at_collisions": true,
"loco_resample_trajectory": true,
"loco_resample_visibility": false,
"loco_verbose": false,
"loco_optimize_time": true,
"loco_v_max": 1,
"loco_a_max": 2,
"loco_yaw_rate_max": 0.78539816339744828,
"loco_sampling_dt": 0.1
}
voxl-vision-px4 conf
{
"config_file_version": 1,
"qgc_ip": "192.168.8.60",
"en_secondary_qgc": false,
"secondary_qgc_ip": "192.168.1.214",
"qgc_udp_port_number": 14550,
"udp_mtu": 512,
"en_localhost_mavlink_udp": true,
"localhost_udp_port_number": 14551,
"en_vio": true,
"en_voa": true,
"en_send_vio_to_qgc": false,
"en_send_voa_to_qgc": false,
"voa_upper_bound_m": -0.15000000596046448,
"voa_lower_bound_m": 0.15000000596046448,
"en_set_clock_from_gps": true,
"en_force_onboard_mav1_mode": true,
"en_reset_px4_on_error": true,
"horizon_cal_tolerance": 0.300000011920929,
"offboard_mode": "trajectory",
"follow_tag_id": 0,
"figure_eight_move_home": true,
"en_tag_fixed_frame": false,
"fixed_frame_filter_len": 5,
"en_transform_mavlink_pos_setpoints_from_fixed_frame": false,
"vio_pipe": "qvio",
"en_reset_vio_if_initialized_inverted": true,
"vio_warmup_s": 3,
"send_odom_while_failed": false,
"robot_radius": 0.300000011920929,
"collision_sampling_dt": 0.1,
"max_lookahead_distance": 1,
"voa_memory_s": 1,
"voa_inputs": [{
"enabled": true,
"type": "point_cloud",
"input_pipe": "dfs_point_cloud",
"frame": "stereo_l"
}, {
"enabled": true,
"type": "point_cloud",
"input_pipe": "stereo_front_pc",
"frame": "stereo_front_l"
}, {
"enabled": true,
"type": "point_cloud",
"input_pipe": "stereo_rear_pc",
"frame": "stereo_rear_l"
}, {
"enabled": true,
"type": "tof",
"input_pipe": "tof",
"frame": "tof"
}, {
"enabled": true,
"type": "rangefinder",
"input_pipe": "rangefinders",
"frame": "body"
}]
}
and
voxl:~$ voxl-version
--------------------------------------------------------------------------------
system-image: 3.8.0
kernel: #1 SMP PREEMPT Tue Apr 26 18:08:39 UTC 2022 3.18.71-perf
--------------------------------------------------------------------------------
hw version: VOXL
--------------------------------------------------------------------------------
voxl-suite: 0.7.0
--------------------------------------------------------------------------------
Packages:
Repo: http://voxl-packages.modalai.com/dists/apq8096/stable/binary-arm64/
http://voxl-packages.modalai.com/stable/
http://voxl-packages.modalai.com/dists/apq8096/sdk-0.9/binary-arm64/
Last Updated: 2022-10-12 01:29:08
List:
apq8096-camera-server 0.9.1
apq8096-dfs-server 0.3.1
apq8096-imu-server 1.0.3
apq8096-libpng 1.6.38-1
apq8096-system-tweaks 0.1.2
apq8096-tflite 2.8.3-1
libapq8096-io 0.6.0
libmodal-cv 0.2.3
libmodal-exposure 0.0.7
libmodal-json 0.4.3
libmodal-pipe 2.6.0
libvoxl-cutils 0.1.1
voxl-camera-calibration 0.2.3
voxl-ceres-solver 1.14.0-9
voxl-cpu-monitor 0.2.6
voxl-docker-support 1.2.4
voxl-eigen3 3.4.0
voxl-gphoto2-server 0.0.10
voxl-jpeg-turbo 2.1.3-4
voxl-libgphoto2 0.0.4
voxl-libuvc 1.0.7
voxl-logger 0.3.4
voxl-mapper 0.1.5
voxl-mavlink 0.1.0
voxl-mavlink-server 0.2.0
voxl-modem 0.16.1
voxl-mongoose 7.7.0-1
voxl-mpa-to-ros 0.3.6
voxl-mpa-tools 0.7.5
voxl-nlopt 2.5.0-4
voxl-opencv 4.5.5-1
voxl-portal 0.3.3
voxl-qvio-server 0.8.2
voxl-streamer 0.4.1
voxl-suite 0.7.0
voxl-tag-detector 0.0.4
voxl-tflite-server 0.3.1
voxl-utils 1.2.2
voxl-uvc-server 0.1.2
voxl-vision-px4 1.4.0
voxl-voxblox 1.1.3
voxl-vpn 0.0.6
--------------------------------------------------------------------------------



{kind=link}
{kind=link}