Issues with indoor mapping speed and path planning with voxl-mapper

-
I have multiple questions regarding path planning with voxl-mapper:
voxl-mapper version: 0.0.7My voxl-mapper config file is :
voxl:~$ cat /etc/modalai/voxl-mapper.conf /** * This file contains configuration that's specific to voxl-mapper. */ { "tof_pipe": "/run/mpa/tof", "tof_enable": true, "tof_rate": 10, "depth_pipe_0": "/run/mpa/dfs_point_cloud", "depth_pipe_0_enable": false, "extrinsics0_name": "stereo_l", "depth0_rate": 10, "depth_pipe_1": "/run/mpa/stereo_front_pc", "depth_pipe_1_enable": false, "extrinsics1_name": "stereo_front_l", "depth1_rate": 10, "depth_pipe_2": "/run/mpa/stereo_rear_pc", "depth_pipe_2_enable": false, "extrinsics2_name": "stereo_rear_l", "depth2_rate": 10, "depth_pipe_3": "/run/mpa/dfs_point_cloud", "depth_pipe_3_enable": false, "extrinsics3_name": "stereo_l", "depth3_rate": 10, "robot_radius": 0.3, "voxel_size": 0.20000000298023224, "voxels_per_side": 16, "esdf_save_path": "/data/voxl_mapper/esdf_map", "tsdf_save_path": "/data/voxl_mapper/tsdf_map", "mesh_save_path": "/data/voxl_mapper/mesh.ply", "esdf_max_distance": 4, "esdf_min_distance": 0.10000000149011612, "esdf_default_distance": 2, "esdf_inner_sphere_radius": 0.20000000298023224, "esdf_outer_sphere_radius": 0.600000023841858, "rrt_min_distance": 0.2, "rrt_max_runtime_nanoseconds": 1000000000, "rrt_use_first_solution": false, "rrt_treat_unknown_as_occupied": true, "rrt_send_tree": false, "loco_num_segments": 10, "loco_derivative_to_optimize": 3, "loco_poly_degree": 10, "loco_smoothness_cost_weight": 2.5, "loco_collision_cost_weight": 14, "loco_waypoint_cost_weight": 0, "loco_min_collision_sampling_dist": 0.05, "loco_add_waypoints": true, "loco_scale_time": true, "loco_split_at_collisions": true, "loco_resample_trajectory": true, "loco_verbose": false }voxl-vision-px4.conf file
voxl:~$ cat /etc/modalai/voxl-vision-px4.conf { "config_file_version": 1, "qgc_ip": "192.168.8.60", "en_secondary_qgc": false, "secondary_qgc_ip": "192.168.1.214", "qgc_udp_port_number": 14550, "udp_mtu": 512, "en_localhost_mavlink_udp": true, "localhost_udp_port_number": 14551, "en_vio": true, "en_voa": true, "en_send_vio_to_qgc": false, "en_send_voa_to_qgc": false, "voa_upper_bound_m": -0.15000000596046448, "voa_lower_bound_m": 0.15000000596046448, "en_set_clock_from_gps": true, "en_force_onboard_mav1_mode": true, "en_reset_px4_on_error": true, "qvio_auto_reset_quality": 0.00050000002374872565, "horizon_cal_tolerance": 0.300000011920929, "offboard_mode": "trajectory", "follow_tag_id": 0, "figure_eight_move_home": true, "en_tag_fixed_frame": false, "fixed_frame_filter_len": 5, "en_transform_mavlink_pos_setpoints_from_fixed_frame": false }-
The following is the image provided in the gitlab repo:
https://gitlab.com/voxl-public/voxl-sdk/services/voxl-mapper/-/raw/master/images/path_plan.png!alt text
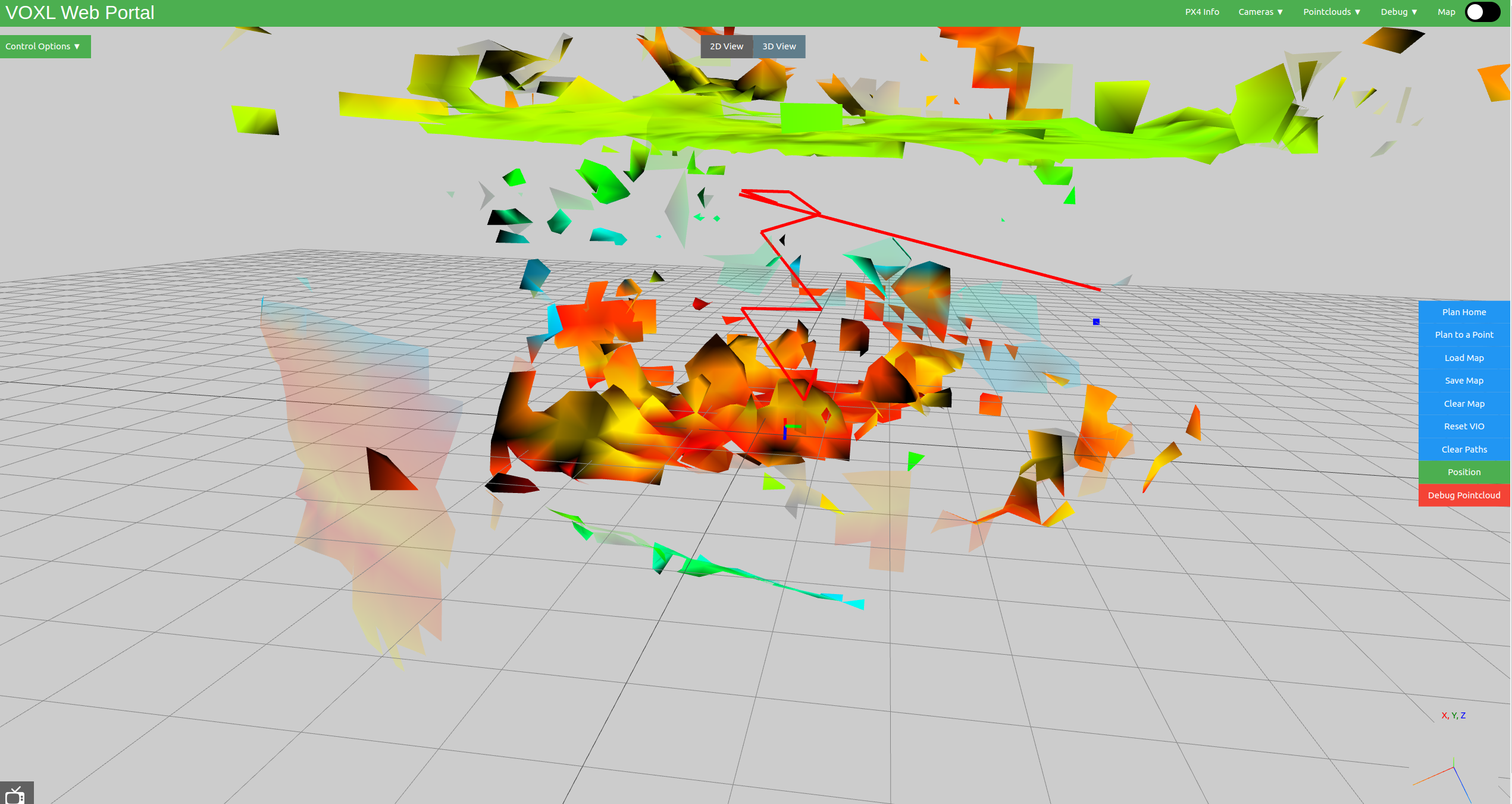
This map has generated both red and blue paths but none of my two maps shown below have blue path. Has the blue path been removed in the new voxl-mapper version? -
I am confused as to how I should select the goal point for the drone to fly to, because it is very hard to visualize exactly where the goal point selected in the voxl mapper is located in the room.
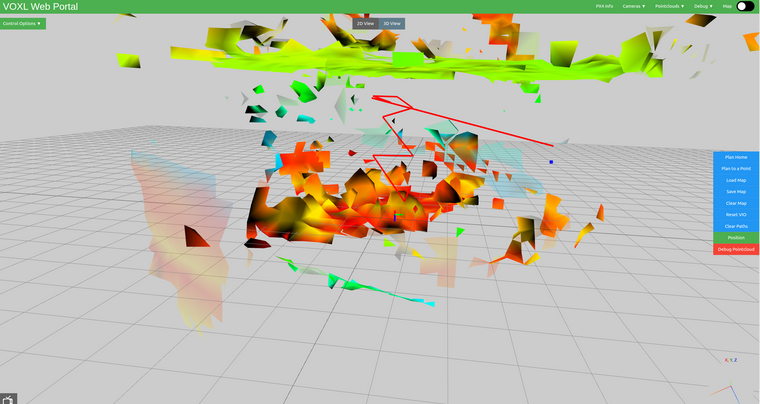
Is it the right apporach to view the map from the top (i.e. from z axis pointing outward the screen: last image) and then select the "goal point"? -
In the last image (viewed from z axis) why does the voxl-mapper create a zig zag path, whereas a straight path is enough to reach the goal point?

- Current mapping speed is very slow. What parameter in the voxl-mapper config map can I change in order to incease the mapping speed?
-
{kind=link}
{kind=link}
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login