@Eric-Katzfey got it, thank you for the info.
K
Latest posts made by KLindgren
-
RE: IMU stream rate fixed at 10Hz (PX4)posted in ROS
@Alex-Kushleyev, we thankfully came across the ROS publisher queue size limit when debugging IMU1 timing and have since increased the queue size to 25.
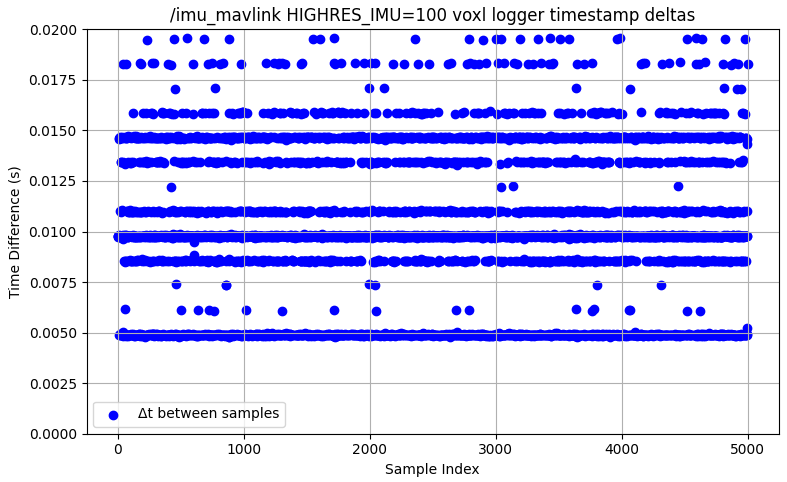
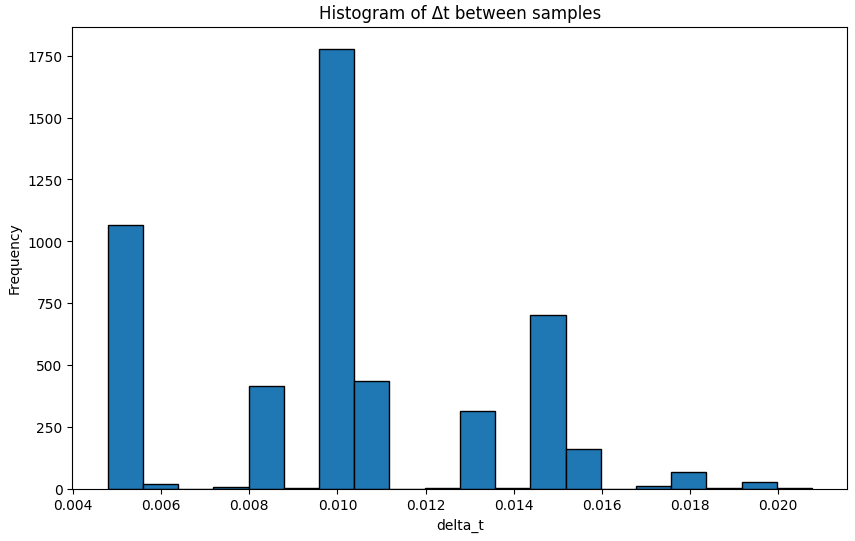
@Eric-Katzfey, is it possible to get a clean ~200 Hz sampling of data from the px4 imu/imu_mavlink? Even setting HIGHRES_IMU to the low value of 100 produces the distribution of timestamp deltas below.
-
RE: IMU stream rate fixed at 10Hz (PX4)posted in ROS
@Eric-Katzfey hoping you can share some more insights here.
I have edited the
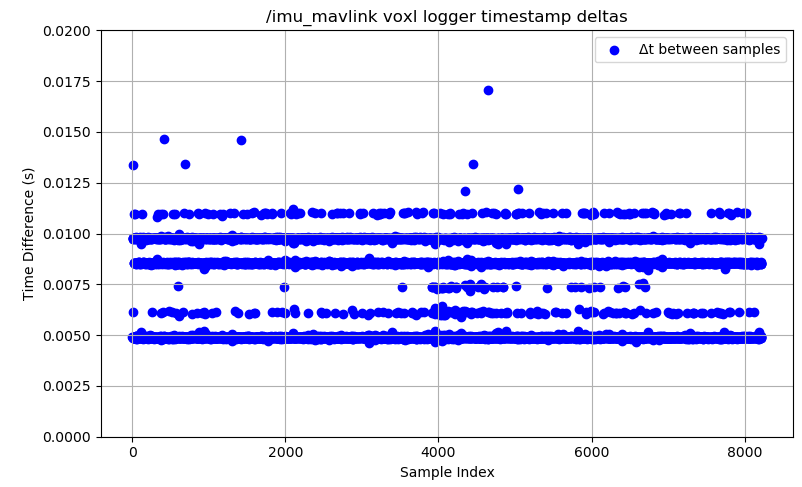
HIGHRES_IMUline in/usr/bin/voxl-px4-startto set the rate at 500 but the/imu_mavlinkrostopic fromvoxl-mpa-to-rosshows a publish rate of ~137hz. Collected data with voxl logger shows the timing issue is not related to ROS -- do you know what may be causing the dropped imu messages in the mpa pipe?
voxl-version──────────────────────────────────────────────────────────────────────────────── system-image: 1.8.04-M0104-14.1a-perf kernel: #1 SMP PREEMPT Mon Mar 24 21:03:36 UTC 2025 4.19.125 ──────────────────────────────────────────────────────────────────────────────── hw platform: M0104 mach.var: 2.0.2 SKU: MCCA-M0104-C22-T0-M0-X0-E1 ──────────────────────────────────────────────────────────────────────────────── voxl-suite: 1.5.0 ────────────────────────────────────────────────────────────────────────────────voxl-px4-start
#!/bin/sh # PX4 commands need the 'px4-' prefix in bash. # (px4-alias.sh is expected to be in the PATH) . px4-alias.sh echo -e "\n*************************" echo "AIRFRAME: $AIRFRAME" echo "GPS: $GPS" echo "RC: $RC" echo "ESC: $ESC" echo "POWER MANAGER: $POWER_MANAGER" echo "AIRSPEED SENSOR: $AIRSPEED_SENSOR" echo "DISTANCE SENSOR: $DISTANCE_SENSOR" echo "OSD: $OSD" echo "ARTIFACT_MODE: $ARTIFACT_MODE" echo "EXTRA STEPS:" for i in "${EXTRA_STEPS[@]}" do echo -e "\t$i" done echo -e "*************************\n" # In order to just exit after starting the uorb / muorb modules define # the environment variable MINIMAL_PX4. (e.g. export MINIMAL_PX4=1) # This is useful for testing / debug where you may want to start drivers # and modules manually from the px4 command shell if [ ! -z $MINIMAL_PX4 ]; then /bin/echo "Running minimal script" exit 0 fi # Figure out what platform we are running on. PLATFORM=`/usr/bin/voxl-platform 2> /dev/null` RETURNCODE=$? if [ $RETURNCODE -ne 0 ]; then # If we couldn't get the platform from the voxl-platform utility then check # /etc/version to see if there is an M0052 substring in the version string. If so, # then we assume that we are on M0052. VERSIONSTRING=$(</etc/version) M0052SUBSTRING="M0052" if [[ "$VERSIONSTRING" == *"$M0052SUBSTRING"* ]]; then PLATFORM="M0052" fi fi # We can only run on M0052, M0054, or M0104 so exit with error if that is not the case if [ $PLATFORM = "M0052" ]; then /bin/echo "Running on M0052" elif [ $PLATFORM = "M0054" ]; then /bin/echo "Running on M0054" elif [ $PLATFORM = "M0104" ]; then /bin/echo "Running on M0104" else /bin/echo "Error, cannot determine platform!" exit 0 fi # Sleep a little here. A lot happens when the uorb and muorb start # and we need to make sure that it all completes successfully to avoid # any possible race conditions. /bin/sleep 1 param select /data/px4/param/parameters # Load in all of the parameters that have been saved in the file param load # IMU (accelerometer / gyroscope) if [ "$PLATFORM" == "M0104" ]; then /bin/echo "Starting IMU driver with rotation 12" qshell icm42688p start -s -R 12 else /bin/echo "Starting IMU driver with no rotation" qshell icm42688p start -s fi # Start Invensense ICP 101xx barometer built on to VOXL 2 qshell icp101xx start -I -b 5 qshell temperature_compensation start # Auto detect the magnetometer. If one or both of these devices # are not connected it will fail but not cause any harm. # Rotation 10 = ROLL_180_YAW_90 /bin/echo "Looking for qmc5883l magnetometer" qshell qmc5883l start -R 10 -X -b 1 /bin/echo "Looking for ist8310 magnetometer" qshell ist8310 start -R 10 -X -b 1 /bin/echo "Looking for ist8308 magnetometer" # Rotation 12 = PITCH_180 qshell ist8308 start -R 12 -X -b 1 # GPS and magnetometer if [ "$GPS" != "NONE" ]; then # On M0052 the GPS driver runs on the apps processor if [ $PLATFORM = "M0052" ]; then gps start -d /dev/ttyHS2 # On M0054 and M0104 the GPS driver runs on SLPI DSP else qshell gps start fi fi # Auto detect an ncp5623c i2c RGB LED. If one isn't connected this will # fail but not cause any harm. /bin/echo "Looking for ncp5623c RGB LED" qshell rgbled_ncp5623c start -X -b 1 -f 400 -a 56 # We do not change the following parameters but QGC will complain if they aren't # being reported as "used" by px4. "Touching" them accomplishes that. param touch SYS_AUTOCONFIG param touch SDLOG_MODE # ESC driver if [ "$ESC" == "VOXL_ESC" ]; then /bin/echo "Starting VOXL ESC driver" qshell voxl_esc start elif [ "$ESC" == "VOXL2_IO_PWM_ESC" ]; then if [ "$RC" == "M0065_SBUS" ]; then /bin/echo "Starting VOXL IO for PWM ESC with SBUS RC" qshell voxl2_io start else /bin/echo "Starting VOXL IO for PWM ESC without SBUS RC" qshell voxl2_io start -e fi else /bin/echo "No ESC type specified, not starting an ESC driver" fi # RC driver if [ "$RC" == "FAKE_RC_INPUT" ]; then /bin/echo "Starting fake RC driver" qshell rc_controller start elif [ "$RC" == "CRSF_RAW" ]; then /bin/echo "Starting CRSF RC driver" qshell crsf_rc start -d 7 elif [ "$RC" == "CRSF_MAV" ]; then /bin/echo "Starting TBS crossfire RC - MAV Mode" qshell mavlink_rc_in start -m -p 7 -b 115200 elif [ "$RC" == "SPEKTRUM" ]; then /bin/echo "Starting Spektrum RC" # On M0052 the RC driver runs on the apps processor if [ $PLATFORM = "M0052" ]; then rc_input start -d /dev/ttyHS1 # On M0054 and M0104 the RC driver runs on SLPI DSP else qshell spektrum_rc start fi elif [ "$RC" == "GHST" ]; then /bin/echo "Starting GHST RC driver" qshell ghst_rc start -d 7 elif [ "$RC" == "M0065_SBUS" ]; then if [ $PLATFORM = "M0052" ]; then apps_sbus start elif [ "$ESC" != "VOXL2_IO_PWM_ESC" ]; then /bin/echo "Attempting to start M0065 SBUS RC driver for original M0065 FW" qshell dsp_sbus start retVal=$? if [ $retVal -ne 0 ]; then /bin/echo "Starting M0065 SBUS RC driver for original M0065 FW failed" /bin/echo "Attempting to start M0065 SBUS RC driver for new M0065 FW" qshell voxl2_io start -d -p 7 fi else /bin/echo "M0065 SBUS RC driver already started with PWM ESC start" fi fi if [ "$DISTANCE_SENSOR" == "LIGHTWARE_SF000" ]; then # Make sure to set the parameter SENS_EN_SF0X to 8 for sf000/b sensor qshell lightware_laser_serial start -d 7 fi if [ "$POWER_MANAGER" == "VOXLPM" ]; then # APM power monitor qshell voxlpm start -X -b 2 fi if [ "$AIRSPEED_SENSOR" == "MS4525DO" ]; then qshell ms4525do start -X -b 4 fi # Optional distance sensor on spare i2c # qshell vl53l0x start -X -b 4 # qshell vl53l1x start -X -b 4 # Start all of the processing modules on DSP qshell sensors start qshell ekf2 start if [ "$AIRFRAME" == "FIXED_WING" ]; then qshell fw_pos_control start qshell fw_att_control start qshell fw_rate_control start qshell airspeed_selector start qshell fw_autotune_attitude_control start qshell land_detector start fixedwing elif [ $AIRFRAME = "MULTICOPTER" ]; then qshell mc_pos_control start qshell mc_att_control start qshell mc_rate_control start qshell mc_hover_thrust_estimator start qshell mc_autotune_attitude_control start qshell land_detector start multicopter fi qshell manual_control start qshell control_allocator start qshell load_mon start # Only start the rc_update module if an actual RC driver # is publishing input_rc topics. Otherwise for external RC # over Mavlink this isn't needed. if [ "$RC" != "EXTERNAL" ]; then qshell rc_update start fi qshell commander start # This is needed for altitude and position hold modes qshell flight_mode_manager start # Start all of the processing modules on the applications processor dataman start navigator start load_mon start # Start microdds_client for ros2 offboard messages from agent over localhost microdds_client start -t udp -h 127.0.0.1 -p 8888 # On M0052 there is only one IMU. So, PX4 needs to # publish IMU samples externally for VIO to use. if [ $PLATFORM = "M0052" ]; then imu_server start fi # start the onboard fast link to connect to voxl-mavlink-server mavlink start -x -u 14556 -o 14557 -r 100000 -n lo -m onboard # slow down some of the fastest streams mavlink stream -u 14556 -s HIGHRES_IMU -r 500 mavlink stream -u 14556 -s ATTITUDE -r 100 mavlink stream -u 14556 -s ATTITUDE_QUATERNION -r 100 mavlink stream -u 14556 -s GLOBAL_POSITION_INT -r 30 mavlink stream -u 14556 -s SCALED_PRESSURE -r 10 # Increase heartbeat rate so VFC can get faster mode updates mavlink stream -u 14556 -s HEARTBEAT -r 100 # start the slow normal mode for voxl-mavlink-server to forward to GCS mavlink start -x -u 14558 -o 14559 -r 100000 -n lo mavlink boot_complete # Optional MSP OSD driver for DJI or HDZero goggles # This is only supported on M0054 (with M0125 accessory board) if [ "$OSD" == "ENABLE" ] || [ "$OSD" == "DJI" ]; then /bin/echo "Starting DJI OSD driver" msp_osd start -d /dev/ttyHS1 elif [ "$PLATFORM" == "M0054" ] && [ "$OSD" == "HDZERO" ] || [ "$OSD" == "DJI_MSP_DP" ]; then /bin/echo "Starting $OSD OSD driver for $PLATFORM" msp_dp_osd start -d /dev/ttyHS1 elif [ "$PLATFORM" == "M0104" ] && [ "$OSD" == "HDZERO" ] || [ "$OSD" == "DJI_MSP_DP" ] ; then /bin/echo "Starting $OSD OSD driver for $PLATFORM" msp_dp_osd start -d /dev/ttyHS0 fi # Start optional EXTRA_STEPS for i in "${EXTRA_STEPS[@]}" do $i done if [ "$ARTIFACT_MODE" == "ENABLE" ]; then # Do not start the logger module if we are in artifact mode. Logging # produces a log artifact. If there are currently any saved logs make # sure to delete them now. # Also remove the data manager file that may have saved GPS waypoint information # in it. # Use shred to remove all files so that they cannot be recovered. # shred should be effective on the /data partition since it has this configuration: # /dev/sda8 /data ext4 rw,nosuid,nodev,noatime,discard,noauto_da_alloc,data=ordered 0 0 /usr/bin/find /data/px4/log -name "*.ulg" -exec /usr/bin/shred -u -n 7 {} \; /bin/rm -fR /data/px4/log /usr/bin/shred -u -n 7 /data/px4/dataman /bin/echo "Artifact mode has been enabled" else # Start logging and use timestamps for log files when possible. # Add the "-e" option to start logging immediately. Default is # to log only when armed. Caution must be used with the "-e" option # because if power is removed without stopping the logger gracefully then # the log file may be corrupted. # This is done as the last step because any topics marked as optional will only # be logged if they have been advertised when this is started. By starting it last it # makes sure to see those advertisements as the other modules are starting before it. logger start -t fi -
RE: FLIR LEPTON 3.5 Thermal camera with VOXL 2posted in Ask your questions right here!
@Jetson-Nano Our 2 Leptons are connected as described in this image - though we're using PureThermal boards instead of M0187s for the Leptons. The 3.3V VIN is provided from the VOXL's J19 port via this cable and a "Y" split jumper we've soldered together.
-
RE: VOXL2 mini does not boot with camera connected (AR0144 via M0084)posted in Ask your questions right here!
@Alex-Kushleyev I'm unfortunately still seeing the same result with no cameras being detected from
voxl-camera-server -l. I've tried J6 with the Lower slot on M0084 and the appropriate camera config which loads the correct.binfile to/usr/lib/camera/. I get the same result with both the AR0144 and the OV7251. Though I do hear the OV7251 when it's connected. Any other ideas you have to try other than replacing the M0084 connection cable? -
RE: FLIR LEPTON 3.5 Thermal camera with VOXL 2posted in Ask your questions right here!
@Jetson-Nano our images looked the same as yours when providing power to the PureThermal from the sparrow board (m0188) but using a 3.3V from the voxl2 mini fixed the issue and gives us this imagery.
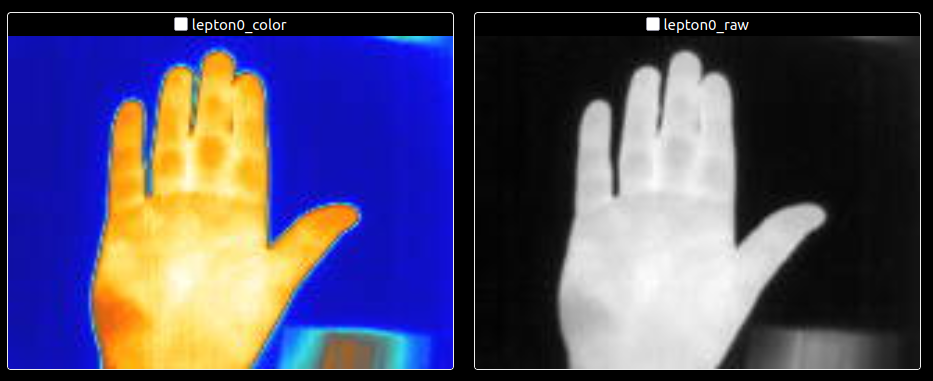
We are using power from the voxl2 mini's J19 and currently working on running 2 leptons with an RGB using the sparrow board.
-
RE: VOXL2 mini does not boot with camera connected (AR0144 via M0084)posted in Ask your questions right here!
@Alex-Kushleyev thank you for the additional tips. Running
voxl-configure-camerasappears to work properly but after a reboot I get someCAM_ERRmessages in the output ofdmesg -wand don't see any cameras listed despite havingcom.qti.sensormodule.ar0144_3.binas the only.binin/usr/lib/camera/. Do the error messages from dmesg make sense to you?voxl2-mini:/$ voxl-configure-cameras Available camera config IDs are as follows: 22 - M0188 Stinger Dual AR0144 33 - M0188 Stinger IMX664 + dual AR0144 34 - M0195 Stinger IMX664 + dual AR0144 + boson 35 - RESERVED for Future Stinger Config 38 - M0188 Sparrow IMX664 + Triple AR0144 50 - MVX-T0001 voxl2 mini hires imx664 51 - MVX-T0001 voxl2 mini hires imx664 + boson 52 - MVX-T0001 voxl2 mini dual hires imx664 + boson C - use user-defined custom camera config in (/data/modalai/custom_camera_config.txt) q - Quit The Wizard selection: c Selecting custom camera config Camera Configuration: custom camera server config helper list: tracking1200:ar0144:0: driver binary list: /usr/share/modalai/chi-cdk/ar0144/com.qti.sensormodule.ar0144_3.bin calling camera-server-config-helper tracking1200:ar0144:0: MISP awb str: auto Setting MISP AWB to Auto MISP channels enabled in defaults : 0 ERROR: object missing misp_channels successfully wrote this camera config to disk: ================================================================= configuration for 1 cameras: cam #0 name: tracking1200 sensor type: ar0144 isEnabled: 1 camId: 0 camId2: -1 fps: 30 en_rotate: 0 en_rotate2: 0 en_preview: 1 pre_width: 1280 pre_height: 800 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_misp: 1 misp_width: 1280 misp_height: 800 en_snapshot: 0 snap_width: -1 snap_height: -1 exif_focal_length: 0.000000 exif_focal_len_35mm_format:0 exif_fnumber: 0.000000 ae_mode: lme_msv msv_exposure_min_us: 20 msv_exposure_max_us: 12000 gain_min : 54 gain_max : 8000 standby_enabled: 0 decimator: 1 independent_exposure:0 fsync_en: 0 fsync_gpio: 109 ================================================================= camera_server_config_helper is done camera-server-config-helper succeeded on attempt 1 leaving fsync pin off copying required camera drivers in place /usr/share/modalai/chi-cdk/ar0144/com.qti.sensormodule.ar0144_3.bin enabling voxl-camera-server ------------------------------------------------------------------ Done Configuring Cameras Please power cycle VOXL to load new drivers camera server will start on next reboot ------------------------------------------------------------------dmesg -w[ 2.501817] ********************************************************** [ 2.501820] ** NOTICE NOTICE NOTICE NOTICE NOTICE NOTICE NOTICE ** [ 2.501822] ** ** [ 2.501824] ** trace_printk() being used. Allocating extra memory. ** [ 2.501826] ** ** [ 2.501827] ** This means that this is a DEBUG kernel and it is ** [ 2.501829] ** unsafe for production use. ** [ 2.501831] ** ** [ 2.501832] ** If you see this message and you are not debugging ** [ 2.501834] ** the kernel, report this immediately to your vendor! ** [ 2.501836] ** ** [ 2.501838] ** NOTICE NOTICE NOTICE NOTICE NOTICE NOTICE NOTICE ** [ 2.501839] ********************************************************** [ 2.533908] kona-pinctrl f000000.pinctrl: invalid function func2 in map table [ 2.533918] kona-pinctrl f000000.pinctrl: invalid function func2 in map table [ 2.533938] kona-pinctrl f000000.pinctrl: invalid function func2 in map table [ 2.533941] kona-pinctrl f000000.pinctrl: invalid function func2 in map table [ 2.552474] voxl_fsync_mod_init [ 2.552615] voxl_fsync_probe [ 2.552698] voxl_fsync_probe : OK [ 2.553718] voxl-gpio init [ 2.554178] voxl_gpio_probe [ 2.554278] voxl-gpio: gpio0 - output, high [ 2.554303] voxl-gpio: gpio1 - output, high [ 2.554337] voxl-gpio: gpio53 - output, high [ 2.554365] voxl-gpio: gpio56 - output, high [ 2.554391] voxl-gpio: gpio57 - output, high [ 2.554419] voxl-gpio: gpio85 - output, high [ 2.554440] voxl-gpio: gpio86 - output, high [ 2.554469] voxl-gpio: gpio87 - output, high [ 2.554493] voxl-gpio: gpio88 - output, high [ 2.554520] voxl-gpio: gpio89 - output, high [ 2.554543] voxl-gpio: gpio124 - output, high [ 2.554568] voxl-gpio: gpio152 - output, high [ 2.554592] voxl-gpio: gpio157 - output, high [ 2.554614] voxl-gpio: gpio159 - output, high [ 2.554641] voxl-gpio: gpio36 - output, low [ 2.554667] voxl-gpio: gpio37 - output, low [ 2.554690] voxl-gpio: gpio46 - output, low [ 2.554715] voxl-gpio: gpio54 - output, low [ 2.554738] voxl-gpio: gpio55 - output, low [ 2.554759] voxl-gpio: gpio67 - output, low [ 2.554785] voxl-gpio: gpio82 - output, low [ 2.554804] voxl-gpio: gpio83 - output, low [ 2.554823] voxl-gpio: gpio84 - output, low [ 2.554848] voxl-gpio: gpio131 - output, low [ 2.554873] voxl-gpio: gpio153 - output, low [ 2.554897] voxl-gpio: gpio154 - output, low [ 2.554919] voxl-gpio: gpio155 - output, low [ 2.554943] voxl-gpio: gpio48 - input [ 2.554965] voxl-gpio: gpio49 - input [ 2.554989] voxl-gpio: gpio50 - input [ 2.555010] voxl-gpio: gpio51 - input [ 2.555036] voxl-gpio: gpio52 - input [ 2.555038] voxl-gpio probe complete [ 2.555797] voxl-platform init [ 2.555921] voxl_platform_probe [ 2.555977] voxl-platform: Machine: - ID - 2 [ 2.555980] voxl-platform: Variant: - ID - 0 [ 2.555981] voxl-platform: Config: - ID - 2 [ 2.555982] voxl-platform probe complete [ 2.820392] usb 2-1: new SuperSpeed Gen 1 USB device number 2 using xhci-hcd [ 2.843542] usb 2-1: New USB device found, idVendor=0b95, idProduct=1790, bcdDevice= 1.00 [ 2.843547] usb 2-1: New USB device strings: Mfr=1, Product=2, SerialNumber=3 [ 2.843550] usb 2-1: Product: AX88179 [ 2.843553] usb 2-1: Manufacturer: ASIX Elec. Corp. [ 2.843556] usb 2-1: SerialNumber: 0000249B2D6BFD [ 3.381859] ax88179_178a 2-1:1.0 eth0: register 'ax88179_178a' at usb-xhci-hcd.0.auto-1, ASIX AX88179 USB 3.0 Gigabit Ethernet, 00:24:9b:2d:6b:fd [ 3.968039] of_batterydata_get_best_profile: No battery data found [ 3.968047] QCOM-STEPCHG: get_step_chg_jeita_setting_from_profile: Couldn't find profile [ 5.066532] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.183184] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.342697] EXT4-fs (sda8): mounted filesystem with ordered data mode. Opts: barrier=1,data=ordered,noauto_da_alloc,discard [ 5.344283] EXT4-fs (sde9): mounted filesystem with ordered data mode. Opts: data=ordered,noauto_da_alloc,discard [ 5.347658] EXT4-fs (sda7): mounted filesystem with ordered data mode. Opts: barrier=1,data=ordered,noauto_da_alloc,discard [ 5.359915] EXT4-fs (sda6): mounted filesystem with ordered data mode. Opts: barrier=1,data=ordered,noauto_da_alloc,discard [ 5.525473] audit: type=1400 audit(1752697558.141:2): apparmor="STATUS" operation="profile_load" profile="unconfined" name="/usr/bin/man" pid=1540 comm="apparmor_parser" [ 5.525482] audit: type=1400 audit(1752697558.141:3): apparmor="STATUS" operation="profile_load" profile="unconfined" name="man_filter" pid=1540 comm="apparmor_parser" [ 5.525487] audit: type=1400 audit(1752697558.141:4): apparmor="STATUS" operation="profile_load" profile="unconfined" name="man_groff" pid=1540 comm="apparmor_parser" [ 5.538166] EXT4-fs (sda2): VFS: Can't find ext4 filesystem [ 5.558507] systemd-journald[539]: File /var/log/journal/1dc6c3557d8c4e05ba60d5d61feb2ba7/user-1000.journal corrupted or uncleanly shut down, renaming and replacing. [ 5.567353] logd.auditd: start [ 5.567362] logd.klogd: 5567346871 [ 5.577913] subsys-pil-tz 8300000.qcom,turing: cdsp: loading from 0x0000000087800000 to 0x0000000088c00000 [ 5.597947] zram0: detected capacity change from 0 to 4022009856 [ 5.599186] Mass Storage Function, version: 2009/09/11 [ 5.599188] LUN: removable file: (no medium) [ 5.608535] Mass Storage Function, version: 2009/09/11 [ 5.608538] LUN: removable file: (no medium) [ 5.609473] file system registered [ 5.617976] f_cdev_alloc: port_name:at_usb0 (ffffffee92363c00) portno:(0) [ 5.629410] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.629520] QCMAP:Start Main [ 5.629870] f_cdev_alloc: port_name:at_usb1 (ffffffee92366c00) portno:(1) [ 5.642461] Adding 3927740k swap on /dev/zram0. Priority:10 extents:1 across:3927740k SS [ 5.650581] subsys-pil-tz 8300000.qcom,turing: cdsp: Brought out of reset [ 5.659736] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.660125] subsys-pil-tz 8300000.qcom,turing: Subsystem error monitoring/handling services are up [ 5.660282] subsys-pil-tz 8300000.qcom,turing: cdsp: Power/Clock ready interrupt received [ 5.665903] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.666012] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.666588] adsprpc: fastrpc_restart_notifier_cb: cdsp subsystem is up [ 5.670363] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.671149] adsprpc: fastrpc_rpmsg_probe: opened rpmsg channel for cdsp [ 5.678359] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.680171] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.681287] 2081443688:Entered [ 5.683758] 2081443688:SMD QRTR driver probed [ 5.683867] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.685251] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.686078] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.688076] sysmon-qmi: ssctl_new_server: Connection established between QMI handle and cdsp's SSCTL service [ 5.688491] gsi_set_inst_name: prot_id = 2, prev inst do not freed yet [ 5.689195] coresight-remote-etm soc:turing_etm0: Connection established between QMI handle and 13 service [ 5.689244] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.691270] diag: In diag_send_feature_mask_update, control channel is not open, p: 5, ffffffa87ceb41c0 [ 5.692508] diag: In diag_send_peripheral_buffering_mode, buffering flag not set for 5 [ 5.693677] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.697029] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.698533] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.699457] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.700259] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.701084] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.701098] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.701331] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.704999] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.705681] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.707512] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.708295] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.711113] gsi_set_inst_name: failed to find prot id for gps instance [ 5.714142] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.716155] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.716168] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.716849] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.717867] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.718798] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.721924] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.722587] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.724250] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.726051] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.726713] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.727688] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.730242] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.731130] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.739603] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.740997] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.742474] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.744260] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.745290] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.746533] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.747386] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.748223] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.749012] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.750354] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.753033] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.753564] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.754990] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.756754] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.757552] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.757894] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.758701] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.762139] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.763403] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.763504] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.782906] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.785204] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.785425] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.786925] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.792639] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.798534] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.805827] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.805912] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.808342] Switching to composition number 0x901D [ 5.812492] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.812750] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.812925] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.813034] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.813332] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.813333] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.813814] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.813951] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.815018] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.815551] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.815605] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.818031] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.818059] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.818253] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.820694] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.822523] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.822664] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.823351] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.825415] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.825716] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.825949] configfs-gadget a600000.dwc3: failed to start g1: -19 [ 5.826215] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.826448] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.828704] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.829122] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.829628] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.830058] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.831372] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.831800] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.832466] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.833651] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.834090] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.834387] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.834588] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.836374] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.839518] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.839958] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.839986] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.841987] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.842163] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.843297] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.843339] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.843420] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.844187] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.844467] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.845424] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.845658] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.845662] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.847007] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.847076] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.847665] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.848072] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.848868] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.849281] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.849386] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.851374] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.852643] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.854065] ufshcd-qcom 1d84000.ufshc: ufshcd_ioctl: User buffer is NULL! [ 5.872560] servloc: service_locator_new_server: Connection established with the Service locator [ 5.872566] servloc: init_service_locator: Service locator initialized [ 5.873254] Launch adb is starting adbd... [ 5.873726] adsprpc: fastrpc_get_service_location_notify: PDR notifier for adsp registered for msm/adsp/audio_pd (audio_pdr_adsprpc) [ 5.873727] adsprpc: fastrpc_get_service_location_notify: audio_pdr_adsprpc (msm/adsp/audio_pd) PDR service for adsp is uninitialized [ 5.873733] audio_notifer_reg_service: service PDR_ADSP is in use [ 5.878642] subsys-restart: __subsystem_get(): Changing subsys fw_name to slpi [ 5.880531] subsys-pil-tz 5c00000.qcom,ssc: slpi: loading from 0x0000000088c00000 to 0x000000008a600000 [ 5.889660] Qseecomd Service Completed [ 5.896781] IPv6: ADDRCONF(NETDEV_UP): eth0: link is not ready [ 5.899510] QTI:Netlink Query to Kernel Success [ 5.900694] QTI:Netlink Query to Kernel Success [ 5.902011] Creating QWES LICENSE STORE : /persist/data/pfm/licenses/ [ 5.907461] QCMAP:Start DHCP server [ 5.909601] read descriptors [ 5.909680] read strings [ 5.958250] QCMAP:DHCP server started [ 5.970043] android_work: did not send uevent (0 0 0000000000000000) [ 5.984513] subsys-pil-tz 5c00000.qcom,ssc: slpi: Brought out of reset [ 6.009694] QSEECOM: qseecom_load_app: App (haventkn) does'nt exist, loading apps for first time [ 6.023576] QSEECOM: qseecom_load_app: App with id 4 (haventkn) now loaded [ 6.040450] subsys-pil-tz 5c00000.qcom,ssc: Subsystem error monitoring/handling services are up [ 6.040468] subsys-pil-tz 5c00000.qcom,ssc: slpi: Power/Clock ready interrupt received [ 6.040518] qcom_rpmh DRV:apps_rsc TCS Busy, retrying RPMH message send: addr=0x30030 [ 6.040557] qcom_rpmh DRV:apps_rsc TCS Busy, retrying RPMH message send: addr=0x30040 [ 6.041844] adsprpc: fastrpc_restart_notifier_cb: slpi subsystem is up [ 6.043849] 2081443688:Entered [ 6.043988] 2081443688:SMD QRTR driver probed [ 6.045852] sysmon-qmi: ssctl_new_server: Connection established between QMI handle and slpi's SSCTL service [ 6.045864] coresight-remote-etm soc:ssc_etm0: Connection established between QMI handle and 8 service [ 6.051243] adsprpc: fastrpc_rpmsg_probe: opened rpmsg channel for slpi [ 6.088541] IPv6: ADDRCONF(NETDEV_UP): bond0: link is not ready [ 6.097168] diag: In diag_send_peripheral_buffering_mode, buffering flag not set for 3 [ 6.156075] QCMAP:GSB disabled [ 6.173630] QCMAP:Init Complete [ 6.177242] QTI:Netlink Query to Kernel Success [ 6.240083] i2c_geni 984000.i2c: I2C xfer timeout: 126 [ 6.240104] i2c_geni 984000.i2c: I2C TXN timed out [ 6.348846] android_work: sent uevent USB_STATE=CONNECTED [ 6.352732] android_work: sent uevent USB_STATE=DISCONNECTED [ 6.496635] android_work: sent uevent USB_STATE=CONNECTED [ 6.503969] configfs-gadget gadget: high-speed config #1: c [ 6.505349] android_work: sent uevent USB_STATE=CONFIGURED [ 6.734162] spi_geni 98c000.spi: tx_fifo 16 rx_fifo 16 tx_width 32 [ 6.933469] CAM_INFO: CAM-HFI: cam_hfi_init: 878 Init IO1 : [0x10c00000 0xcf300000] IO2 [0xe0200000 0x1ed00000] [ 6.943636] CAM_INFO: CAM-ICP: cam_icp_mgr_process_dbg_buf: 2572 FW_DBG:CICP_FW_E : HFI :QC_IMAGE_VERSION_STRING=CICP.FW.1.0-00079,OEM_IMAGE_VERSION_STRING=CRM,BUILD_TIME: Oct 17 2019 05:49:19,CACHE_ENABLED at icphostinterface.c:636 QC_IMAGE_VERSION_STRING=CICP.FW.1.0-00079 OEM_IMAGE_VERSION_STRING=CRM [ 6.943640] CAM_INFO: CAM-ICP: cam_icp_mgr_process_dbg_buf: 2572 FW_DBG:CICP_FW_E : HFI :ELF variant: CACHE-ENABLED:T480:API_V2:USE_CDM_1_1: , API version: 0x2000049 at icphostinterface.c:637 QC_IMAGE_VERSION_STRING=CICP.FW.1.0-00079 OEM_IMAGE_VERSION_STRING=CRM [ 6.943670] CAM_INFO: CAM-ICP: cam_icp_mgr_hw_open: 3879 FW download done successfully [ 6.944287] Started adbd. [ 7.030062] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Linked as a consumer to regulator.59 [ 7.032137] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Linked as a consumer to regulator.56 [ 7.034239] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Linked as a consumer to regulator.60 [ 7.034296] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Linked as a consumer to regulator.79 [ 7.057583] CAM_ERR: CAM-CCI: cam_cci_irq: 264 Base: pK-error, M1_Q1 NACK ERROR: 0x40000000 [ 7.057775] CAM_ERR: CAM-CCI: cam_cci_read: 1329 ERROR with Slave 0x30: [ 7.057781] CAM_ERR: CAM-CCI: cam_cci_read_bytes: 1613 failed to read rc:-22 [ 7.057786] CAM_ERR: CAM-SENSOR: cam_cci_i2c_read: 35 rc = -22 [ 7.057790] CAM_WARN: CAM-SENSOR: cam_sensor_match_id: 707 read id: 0x0 expected id 0x356: [ 7.057868] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Dropping the link to regulator.79 [ 7.062086] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Dropping the link to regulator.60 [ 7.062260] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Dropping the link to regulator.56 [ 7.062416] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Dropping the link to regulator.59 [ 7.118906] CAM_WARN: CAM-CRM: cam_req_mgr_close: 160 release invoked associated userspace process has died [ 7.264045] i2c_geni 984000.i2c: Cancel failed [ 7.264126] i2c_geni 984000.i2c: i2c error :-110 [ 7.776037] i2c_geni 984000.i2c: I2C xfer timeout: 126 [ 7.776047] i2c_geni 984000.i2c: I2C TXN timed out [ 8.800070] i2c_geni 984000.i2c: Cancel failed [ 8.800138] i2c_geni 984000.i2c: i2c error :-110 [ 8.978520] ax88179_178a 2-1:1.0 eth0: ax88179 - Link status is: 1 [ 8.990797] IPv6: ADDRCONF(NETDEV_CHANGE): eth0: link becomes ready [ 9.004482] QTI:LINK_UP message posted [ 9.006866] QTI:Processing LINK_UP [ 9.017782] QTI:Enable mobileap [ 9.022380] QCMAP:Enable mobileap [ 9.100386] QCMAP:Enable mobileap done [ 9.103389] QTI:Setup TETHERED link [ 9.149393] QTI:LINK_UP Processed [ 9.312038] i2c_geni 984000.i2c: I2C xfer timeout: 126 [ 9.312046] i2c_geni 984000.i2c: I2C TXN timed out [ 10.336034] i2c_geni 984000.i2c: Cancel failed [ 10.336093] i2c_geni 984000.i2c: i2c error :-110 [ 10.336511] spi_geni 980000.spi: tx_fifo 16 rx_fifo 16 tx_width 32 [ 10.510884] CAM_ERR: CAM-MEM: cam_mem_mgr_create_debug_fs: 126 failed to create dentry [ 10.521979] CAM_INFO: CAM-HFI: cam_hfi_init: 878 Init IO1 : [0x10c00000 0xcf300000] IO2 [0xe0200000 0x1ed00000] [ 10.532178] CAM_INFO: CAM-ICP: cam_icp_mgr_hw_open: 3879 FW download done successfully [ 10.532203] CAM_INFO: CAM-ICP: cam_icp_mgr_process_dbg_buf: 2572 FW_DBG:CICP_FW_E : HFI :QC_IMAGE_VERSION_STRING=CICP.FW.1.0-00079,OEM_IMAGE_VERSION_STRING=CRM,BUILD_TIME: Oct 17 2019 05:49:19,CACHE_ENABLED at icphostinterface.c:636 QC_IMAGE_VERSION_STRING=CICP.FW.1.0-00079 OEM_IMAGE_VERSION_STRING=CRM [ 10.532221] CAM_INFO: CAM-ICP: cam_icp_mgr_process_dbg_buf: 2572 FW_DBG:CICP_FW_E : HFI :ELF variant: CACHE-ENABLED:T480:API_V2:USE_CDM_1_1: , API version: 0x2000049 at icphostinterface.c:637 QC_IMAGE_VERSION_STRING=CICP.FW.1.0-00079 OEM_IMAGE_VERSION_STRING=CRM [ 10.552445] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Linked as a consumer to regulator.59 [ 10.554570] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Linked as a consumer to regulator.56 [ 10.556116] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Linked as a consumer to regulator.60 [ 10.556169] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Linked as a consumer to regulator.79 [ 10.577155] CAM_ERR: CAM-CCI: cam_cci_irq: 264 Base: pK-error, M1_Q1 NACK ERROR: 0x40000000 [ 10.577186] CAM_ERR: CAM-CCI: cam_cci_read: 1329 ERROR with Slave 0x30: [ 10.577192] CAM_ERR: CAM-CCI: cam_cci_read_bytes: 1613 failed to read rc:-22 [ 10.577195] CAM_ERR: CAM-SENSOR: cam_cci_i2c_read: 35 rc = -22 [ 10.577200] CAM_WARN: CAM-SENSOR: cam_sensor_match_id: 707 read id: 0x0 expected id 0x356: [ 10.577271] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Dropping the link to regulator.79 [ 10.581586] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Dropping the link to regulator.60 [ 10.581950] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Dropping the link to regulator.56 [ 10.582115] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Dropping the link to regulator.59 [ 10.637715] CAM_WARN: CAM-CRM: cam_req_mgr_close: 160 release invoked associated userspace process has died [ 14.021650] CAM_ERR: CAM-MEM: cam_mem_mgr_create_debug_fs: 126 failed to create dentry [ 14.031199] CAM_INFO: CAM-HFI: cam_hfi_init: 878 Init IO1 : [0x10c00000 0xcf300000] IO2 [0xe0200000 0x1ed00000] [ 14.041334] CAM_INFO: CAM-ICP: cam_icp_mgr_process_dbg_buf: 2572 FW_DBG:CICP_FW_E : HFI :QC_IMAGE_VERSION_STRING=CICP.FW.1.0-00079,OEM_IMAGE_VERSION_STRING=CRM,BUILD_TIME: Oct 17 2019 05:49:19,CACHE_ENABLED at icphostinterface.c:636 QC_IMAGE_VERSION_STRING=CICP.FW.1.0-00079 OEM_IMAGE_VERSION_STRING=CRM [ 14.041338] CAM_INFO: CAM-ICP: cam_icp_mgr_process_dbg_buf: 2572 FW_DBG:CICP_FW_E : HFI :ELF variant: CACHE-ENABLED:T480:API_V2:USE_CDM_1_1: , API version: 0x2000049 at icphostinterface.c:637 QC_IMAGE_VERSION_STRING=CICP.FW.1.0-00079 OEM_IMAGE_VERSION_STRING=CRM [ 14.041365] CAM_INFO: CAM-ICP: cam_icp_mgr_hw_open: 3879 FW download done successfully [ 14.075832] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Linked as a consumer to regulator.59 [ 14.077969] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Linked as a consumer to regulator.56 [ 14.080157] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Linked as a consumer to regulator.60 [ 14.080215] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Linked as a consumer to regulator.79 [ 14.102779] CAM_ERR: CAM-CCI: cam_cci_irq: 264 Base: pK-error, M1_Q1 NACK ERROR: 0x40000000 [ 14.102806] CAM_ERR: CAM-CCI: cam_cci_read: 1329 ERROR with Slave 0x30: [ 14.102811] CAM_ERR: CAM-CCI: cam_cci_read_bytes: 1613 failed to read rc:-22 [ 14.102814] CAM_ERR: CAM-SENSOR: cam_cci_i2c_read: 35 rc = -22 [ 14.102818] CAM_WARN: CAM-SENSOR: cam_sensor_match_id: 707 read id: 0x0 expected id 0x356: [ 14.102901] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Dropping the link to regulator.79 [ 14.106387] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Dropping the link to regulator.60 [ 14.106451] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Dropping the link to regulator.56 [ 14.106510] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Dropping the link to regulator.59 [ 14.138438] CAM_WARN: CAM-CRM: cam_req_mgr_close: 160 release invoked associated userspace process has died [ 33.760180] vdd_tof: disabling [ 33.760184] vdd_hap_boost: disablingvoxl2-mini:/$ ls -l /usr/lib/camera/com com.qti.eeprom.cmk_imx577.so com.qti.sensor.ov7251_front_right.so com.qti.sensor.ar0144.so com.qti.sensor.ov7251_front_right_flip.so com.qti.sensor.boson.so com.qti.sensor.ov7251_fsin.so com.qti.sensor.cmk_imx577.so com.qti.sensor.ov7251_fsout.so com.qti.sensor.cmk_imx577_flip.so com.qti.sensor.ov7251_rear_left.so com.qti.sensor.imx214.so com.qti.sensor.ov7251_rear_left_flip.so com.qti.sensor.imx214_flip.so com.qti.sensor.ov7251_rear_right.so com.qti.sensor.imx335.so com.qti.sensor.ov7251_rear_right_flip.so com.qti.sensor.imx377.so com.qti.sensor.ov9782.so com.qti.sensor.imx412_fpv.so com.qti.sensor.ov9782_front_left.so com.qti.sensor.imx664.so com.qti.sensor.ov9782_front_left_flip.so com.qti.sensor.imx678.so com.qti.sensor.ov9782_front_right.so com.qti.sensor.imx678_flip.so com.qti.sensor.ov9782_front_right_flip.so com.qti.sensor.imx678_mod.so com.qti.sensor.ov9782_rear_left.so com.qti.sensor.irs1645.so com.qti.sensor.ov9782_rear_left_flip.so com.qti.sensor.irs2975c.so com.qti.sensor.ov9782_rear_right.so com.qti.sensor.ov64b40.so com.qti.sensor.ov9782_rear_right_flip.so com.qti.sensor.ov7251.so com.qti.sensormodule.ar0144_3.bin com.qti.sensor.ov7251_front_left.so components/ com.qti.sensor.ov7251_front_left_flip.sovoxl2-mini:/$ voxl-camera-server -l DEBUG: Attempting to open the hal module DEBUG: SUCCESS: Camera module opened on attempt 0 DEBUG: ----------- Number of cameras: 0 DEBUG: Note: This list comes from the HAL module and may not be indicative DEBUG: of configurations that have full pipelines DEBUG: Number of cameras: 0 -
RE: FLIR LEPTON 3.5 Thermal camera with VOXL 2posted in Ask your questions right here!
@Vinny apologies, I should have clarified we're using this PureThermal breakout board which regulates VIN from 3.3-5V
-
RE: FLIR LEPTON 3.5 Thermal camera with VOXL 2posted in Ask your questions right here!
To close the loop here: we solved our issue of seeing lines by providing power to the lepton via one of the 3.3V pins on the voxl2 mini instead of relying on the power pin of J10 on the sparrow board.
-
RE: VOXL2 mini does not boot with camera connected (AR0144 via M0084)posted in Ask your questions right here!
@Alex-Kushleyev I don't seem to have the privileges here to upload images but you should be able to see them in this GDrive folder.