@Moderator et.al. i just want to follow up that switching to the nightly builds that uses out of box the openvins implementation for VIO, is significantly better than the qvio. in other words, it actually fixed all the problems that we were facing with the QVIO.
Best posts made by Viktor Gal
-
RE: Timeline for open-vins documentationposted in Ask your questions right here!
Latest posts made by Viktor Gal
-
RE: VOXL2 TOF Camera not workingposted in VOXL 2
@Thomas-Müller interesting. i'm just experience the very same thing. have you by chance figured out what was the issue?
-
RE: flashing starling 1.1.4 with the latest 1.4.5posted in Starling & Starling 2
@Alex-Kushleyev yes yes, it boots up fine in normal mode
-
RE: flashing starling 1.1.4 with the latest 1.4.5posted in Starling & Starling 2
@Alex-Kushleyev you reckon? i mean the starling v2 just went to fastboot mode very nicely and i could flash it easily on the same macos. or is there so much of a difference between the starling v1 and v2 chips? i'll give it a go on the raspberry pi.
-
RE: flashing starling 1.1.4 with the latest 1.4.5posted in Starling & Starling 2
using the dip switch and powercycling there's no devices showing up with
sudo fastboot devices.unfortunately no
lsbusbas i'm under macos, but sysprofiler's output is:Host Controller Driver: AppleT6000USBXHCI QUSB_BULK_CID:0412_SN:008A1847: Product ID: 0x9008 Vendor ID: 0x05c6 (Qualcomm, Inc) Version: 0.00 Speed: Up to 480 Mb/s Manufacturer: Qualcomm CDMA Technologies MSM Location ID: 0x01100000 / 1 Current Available (mA): 500 Current Required (mA): 2 Extra Operating Current (mA): 0if you really think there's some extra info with lsusb that you are looking for i can hook it up to my raspberry pi.
-
RE: flashing starling 1.1.4 with the latest 1.4.5posted in Starling & Starling 2
@Alex-Kushleyev as said above with the very same machine i successfully updated a starling v2 drone. but i'll try to check what you've just suggested.
-
RE: elrs fw compatibilityposted in Starling & Starling 2
@Maxwell-Schaefer thnx for getting back to me. i've seen that on starling the betafpv module is currently having 3.2.1.2. are you using any specific customiziation? i'm just wondering as the mavlink-rc support requires 3.5.0 or later.
-
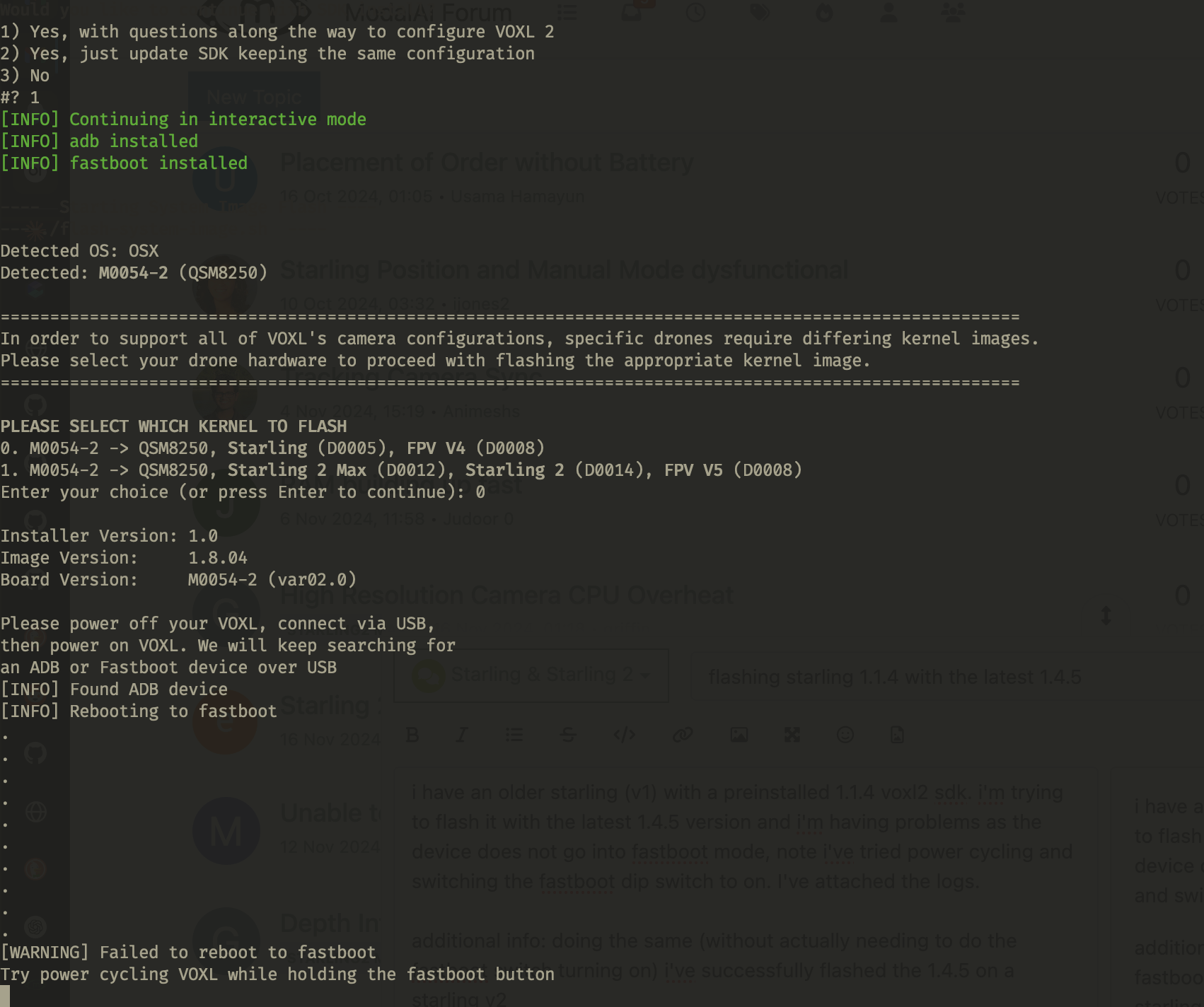
flashing starling 1.1.4 with the latest 1.4.5posted in Starling & Starling 2
i have an older starling (v1) with a preinstalled 1.1.4 voxl2 sdk. i'm trying to flash it with the latest 1.4.5 version and i'm having problems as the device does not go into fastboot mode, note i've tried power cycling and switching the fastboot dip switch to on. I've attached the logs.
additional info: doing the same (without actually needing to do the fastboot switch turning on) i've successfully flashed the 1.4.5 on a starling v2!
-
elrs fw compatibilityposted in Starling & Starling 2
although this is a general question for voxl sdk since i'm using it with starlings i'm wondering whether there's any limitation (or has anybody tested) for the FW version of the ELRS controller with the latest voxl2 sdk? meaning the latest release of the ELRS FW is 3.5.5, my iflight commando is flashed with a custom modalai v2.8.5, and i'm wondering if anybody tested with 3.5.x FW....?
-
RE: starling 2 RMAposted in Ask your questions right here!
@tom as said when we swapped the voxl2 board from another drone everything works fine. moreover, i assume that the board should work without connecting anything to it (just power and usbc) but there's 0 signal from the voxl2 board itself. meaning nothing pops up in lsusb -v.
-
starling 2 RMAposted in Ask your questions right here!
I'm writing you as I couldn't find relevant information regarding my question neither in the forum nor at the FAQ section. We purchased about 6 drones from you in the past and currently facing a problem with one of our drones. basically the VOXL2 main board seems to be dead. we've tried to connect to it via usb from various computers, but it doesn't even show up in the dmesg/lsusb. since we have many other drones (hence parts) we quickly eliminated the other options, i.e. other parts being broken. it is definitely the main voxl2 board.
I'm wondering now whether in this case, for creating an RMA, would it be sufficient for you that we send back the board itself or you really need us to send back the full Starling 2 drone itself?
{kind=link}