Unable to echo ros2 topic from drone to a computer
-
Hey @Aniruddha
As I understand it, you are able to see the topics on your computer but cant echo them. Which topic are you trying to echo so I can try to recreate it on my end?@ApoorvThapliyal I was trying to echo /imu_apps
-
Hey @Aniruddha
As I understand it, you are able to see the topics on your computer but cant echo them. Which topic are you trying to echo so I can try to recreate it on my end?@ApoorvThapliyal I forgot to mention that the error occurred on drone side for voxl_mpa_to_ros2_node. While on computer it is not printing anything
-
@ApoorvThapliyal I forgot to mention that the error occurred on drone side for voxl_mpa_to_ros2_node. While on computer it is not printing anything
Hey @Aniruddha
I tried recreating the issue on my setup using a Starling V2 Max connected to my computer over Wi-Fi. On my end, I’m able to echo ROS 2 topics both on the drone and from the computer without any issues. I even added the same static IP configuration you used, and I was still able to echo my topics without any errors.You also mentioned seeing an error on the drone side for the voxl_mpa_to_ros2_node, could you clarify what the exact error is? Are you unable to run ros2 topic echo directly on the drone as well, or is the problem only when echoing from your computer? Additionally, which drone model are you using?
-
Hey @Aniruddha
I tried recreating the issue on my setup using a Starling V2 Max connected to my computer over Wi-Fi. On my end, I’m able to echo ROS 2 topics both on the drone and from the computer without any issues. I even added the same static IP configuration you used, and I was still able to echo my topics without any errors.You also mentioned seeing an error on the drone side for the voxl_mpa_to_ros2_node, could you clarify what the exact error is? Are you unable to run ros2 topic echo directly on the drone as well, or is the problem only when echoing from your computer? Additionally, which drone model are you using?
-
@Aniruddha
What version SDK are you using? What are the versions ofvoxl-mpa-to-ros2,voxl-microdds-agent,voxl-ros2-foxyandvoxl-px4. You can find it with the command:voxl-version
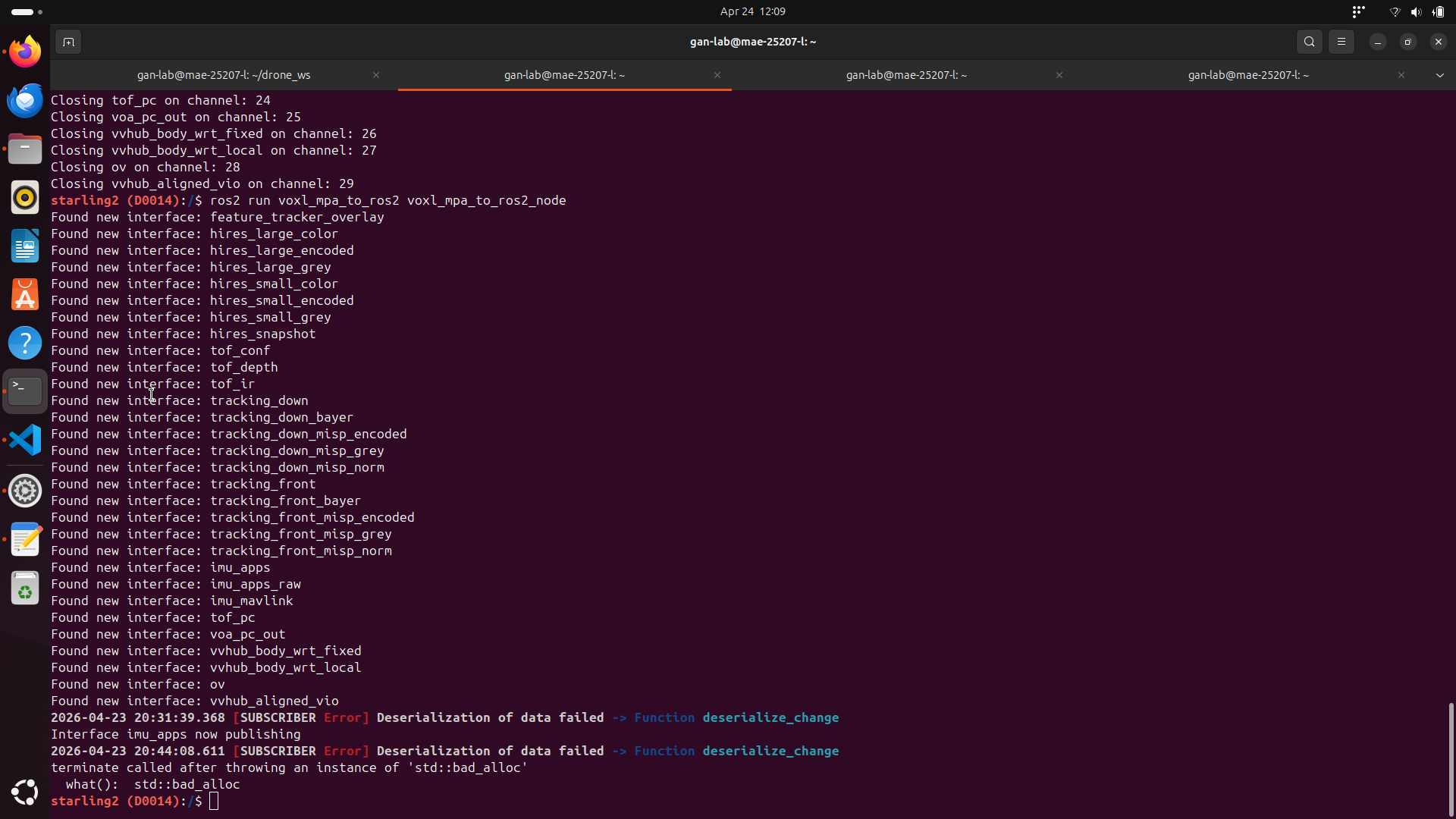
My suspicion is that the ros2 message being published is of a different size than what ros2 subscriber is expecting, and that's causing the break
Here are the versions I used that worked for me:
voxl-mpa-to-ros2 0.0.7-202511100959
voxl-microdds-agent 3.0.0-0-202511141239
voxl-ros2-foxy 0.0.1-202511141235
voxl-px4 1.14.0-2.0.134 -
@Aniruddha
What version SDK are you using? What are the versions ofvoxl-mpa-to-ros2,voxl-microdds-agent,voxl-ros2-foxyandvoxl-px4. You can find it with the command:voxl-version
My suspicion is that the ros2 message being published is of a different size than what ros2 subscriber is expecting, and that's causing the break
Here are the versions I used that worked for me:
voxl-mpa-to-ros2 0.0.7-202511100959
voxl-microdds-agent 3.0.0-0-202511141239
voxl-ros2-foxy 0.0.1-202511141235
voxl-px4 1.14.0-2.0.134@ApoorvThapliyal sorry for the late reply. my drone got bricked so I had to reinstall everything. I am still facing the same issue.
here are the sdk versions
voxl-sdk is 1.6.3
voxl-mpa-to-ros2 0.0.7
voxl-microdds-agent 3.0.0-0
voxl-ros2-foxy 0.0.1
voxl-px4 1.14.0-2.0.133also one more thing I forgot to mention before was I was initially was not able to see ros2 topics from drone on my computer but when I install netcat on drone then I was able to see those topics. but I still can't echo them
-
@ApoorvThapliyal sorry for the late reply. my drone got bricked so I had to reinstall everything. I am still facing the same issue.
here are the sdk versions
voxl-sdk is 1.6.3
voxl-mpa-to-ros2 0.0.7
voxl-microdds-agent 3.0.0-0
voxl-ros2-foxy 0.0.1
voxl-px4 1.14.0-2.0.133also one more thing I forgot to mention before was I was initially was not able to see ros2 topics from drone on my computer but when I install netcat on drone then I was able to see those topics. but I still can't echo them
@Aniruddha
Even after matching the versions, I am not able to recreate your error
I will try relfashing my voxl2, to start from a clean slate similar to your setup right now.
Since you reflashed the voxl2, is there something you changed on the voxl2 for your goals? I assume that after a reflash, I should have the same setup as you -
@Aniruddha
Even after matching the versions, I am not able to recreate your error
I will try relfashing my voxl2, to start from a clean slate similar to your setup right now.
Since you reflashed the voxl2, is there something you changed on the voxl2 for your goals? I assume that after a reflash, I should have the same setup as you@ApoorvThapliyal does my ros2 version on my computer could be an issue. I have ros2 jazzy running on my computer where drone has foxy
-
@ApoorvThapliyal does my ros2 version on my computer could be an issue. I have ros2 jazzy running on my computer where drone has foxy
Hey @Aniruddha
I was able to recreate your issue with ROS2 jazzy, seems like there is a mismatch between topic size between the versions.
I use humble on my laptop and havent faced any issues, try using it and let me know your resultsI'll investigate this issue further
-
Hey @Aniruddha
I was able to recreate your issue with ROS2 jazzy, seems like there is a mismatch between topic size between the versions.
I use humble on my laptop and havent faced any issues, try using it and let me know your resultsI'll investigate this issue further
@ApoorvThapliyal Thank you for your help. also I was able to work with jazzy by only subscribing and printing with node. since error only occurred when I tried to echo the topic and not when another node is subscribing it. but using docker seems like most viable option to me since I m using ubuntu 24.04. Thank you for your help again
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login