M0173 with 4 AR0144 Tracking cameras
-
@cbay , M0188 does NOT support a Boson sensor, which has different power requirements (compared to tracking, hires cameras) and uses different pinout of the same micro coax port type.
M0195 supports 4 cameras + Boson https://docs.modalai.com/M0195/ , but the Boson takes ID2 (CCI2), meaning you would have to put AR0144 cameras on IDs 0,1,3,6 and IDs 1 and 6 would still have a CCI conflict (CCI1). So you would still need the alt slave address for one AR0144.
Boson can only be connected to J2 of M0195, as documented.
Let me check about the dual lepton. It is documented, but i just want to confirm that it works.
Alex
@Alex-Kushleyev Got the three Ar0144s working, though only 2 are giving me Misp norm streams.
Thanks again for your help
-
@Alex-Kushleyev Got the three Ar0144s working, though only 2 are giving me Misp norm streams.
Thanks again for your help
@cbay , what happens with the third misp norm stream? Is it not available? Maybe you did not enable misp for that camera in voxl-camera-server.conf?
-
@cbay , what happens with the third misp norm stream? Is it not available? Maybe you did not enable misp for that camera in voxl-camera-server.conf?
@Alex-Kushleyev said in M0173 with 4 AR0144 Tracking cameras:
@cbay , what happens with the third misp norm stream? Is it not available? Maybe you did not enable misp for that camera in voxl-camera-server.conf?
Before it was the exact same setup in voxl-camera-server, rebooted and it just works now so not sure what was happening
-
@cbay , M0188 does NOT support a Boson sensor, which has different power requirements (compared to tracking, hires cameras) and uses different pinout of the same micro coax port type.
M0195 supports 4 cameras + Boson https://docs.modalai.com/M0195/ , but the Boson takes ID2 (CCI2), meaning you would have to put AR0144 cameras on IDs 0,1,3,6 and IDs 1 and 6 would still have a CCI conflict (CCI1). So you would still need the alt slave address for one AR0144.
Boson can only be connected to J2 of M0195, as documented.
Let me check about the dual lepton. It is documented, but i just want to confirm that it works.
Alex
@Alex-Kushleyev said in M0173 with 4 AR0144 Tracking cameras:
one
Any info about the dual lepton, it does seem to be documented that it works, please let me know if it doesnt.
-
@Alex-Kushleyev said in M0173 with 4 AR0144 Tracking cameras:
one
Any info about the dual lepton, it does seem to be documented that it works, please let me know if it doesnt.
Hi @cbay ,
I checked with the team - we have not tested using the second lepton plugged into either M0188 or M0195.
The
voxl-lepton-serveris not set up to handle two sensors. It would have to be the same process managing both sensors because the i2c communication to both would happen over the same i2c bus and the i2c switcher would need to control which sensor is actually being communicated with via i2c.We have checked that we can control the i2c switcher, but that's about it. We have not needed to use the second lepton (yet).
If you wanted to try it, that would be a risk, but here are the steps:
- plug in and test lepton in primary port
- unplug the primary lepton and plug it into secondary port
- update the
voxl-lepton-serverto control the i2c switcher to switch the i2c path to second port - test the lepton plugged into second port
- *** main task *** update the
voxl-lepton-serverto manage two lepton sensors, switching the i2c communication path, when it is appropriate- please note that during normal operation, the i2c communication with lepton is not needed, i believe we only use it if we need to reset the sensor
Alex
-
Hi @cbay ,
I checked with the team - we have not tested using the second lepton plugged into either M0188 or M0195.
The
voxl-lepton-serveris not set up to handle two sensors. It would have to be the same process managing both sensors because the i2c communication to both would happen over the same i2c bus and the i2c switcher would need to control which sensor is actually being communicated with via i2c.We have checked that we can control the i2c switcher, but that's about it. We have not needed to use the second lepton (yet).
If you wanted to try it, that would be a risk, but here are the steps:
- plug in and test lepton in primary port
- unplug the primary lepton and plug it into secondary port
- update the
voxl-lepton-serverto control the i2c switcher to switch the i2c path to second port - test the lepton plugged into second port
- *** main task *** update the
voxl-lepton-serverto manage two lepton sensors, switching the i2c communication path, when it is appropriate- please note that during normal operation, the i2c communication with lepton is not needed, i believe we only use it if we need to reset the sensor
Alex
@Alex-Kushleyev Thanks so much for the information. I will be receiving the boards shortly and will run through those tests.
How much work do you think it would take to update voxl-lepton-server
-
@Alex-Kushleyev Thanks so much for the information. I will be receiving the boards shortly and will run through those tests.
How much work do you think it would take to update voxl-lepton-server
@cbay , you could actually test two leptons by disabling i2c port for one (or both) of them. Lepton starts up streaming data by default via SPI, so you can get frames from it without any communication.
In order to do that, you would need to run two instances of
voxl-lepton-serverand the second instance would have to be modified to read from a different config file and to not kill the existingvoxl-lepton-serverprocess (and probably name itself differently, so that the first server does not kill the second during start-up).If this all works, then in order to actually test two leptons with i2c communication (which we use the set the FFC mode depending on the flight mode and also reset the sensor if it gets into a weird state while streaming), the lepton server functionality would probably need to be added to a C++ class so that multiple instances could be run from the same process. The reason is that there needs to be a single point where the i2c switcher is set to one or the other lepton, right before communicating to one of the leptons (without the other server / thread creating a race condition and trying to do communicate right at the same time)..
I'd have to think about the fastest way of doing this, but at least you should be able to test two leptons with second not using i2c with very minimal changes.
Here is the source code for the
voxl-lepton-serverin case you did not already find it: https://gitlab.com/voxl-public/voxl-sdk/services/voxl-lepton-server/-/blob/master/src/Alex
-
@cbay , you could actually test two leptons by disabling i2c port for one (or both) of them. Lepton starts up streaming data by default via SPI, so you can get frames from it without any communication.
In order to do that, you would need to run two instances of
voxl-lepton-serverand the second instance would have to be modified to read from a different config file and to not kill the existingvoxl-lepton-serverprocess (and probably name itself differently, so that the first server does not kill the second during start-up).If this all works, then in order to actually test two leptons with i2c communication (which we use the set the FFC mode depending on the flight mode and also reset the sensor if it gets into a weird state while streaming), the lepton server functionality would probably need to be added to a C++ class so that multiple instances could be run from the same process. The reason is that there needs to be a single point where the i2c switcher is set to one or the other lepton, right before communicating to one of the leptons (without the other server / thread creating a race condition and trying to do communicate right at the same time)..
I'd have to think about the fastest way of doing this, but at least you should be able to test two leptons with second not using i2c with very minimal changes.
Here is the source code for the
voxl-lepton-serverin case you did not already find it: https://gitlab.com/voxl-public/voxl-sdk/services/voxl-lepton-server/-/blob/master/src/Alex
-
@Alex-Kushleyev Hi, I'm working with @cbay on this project and I just wanted to report that I was able to modify
voxl-lepton-serverwith your suggestions and achieved dual lepton camera streaming into voxl-portal.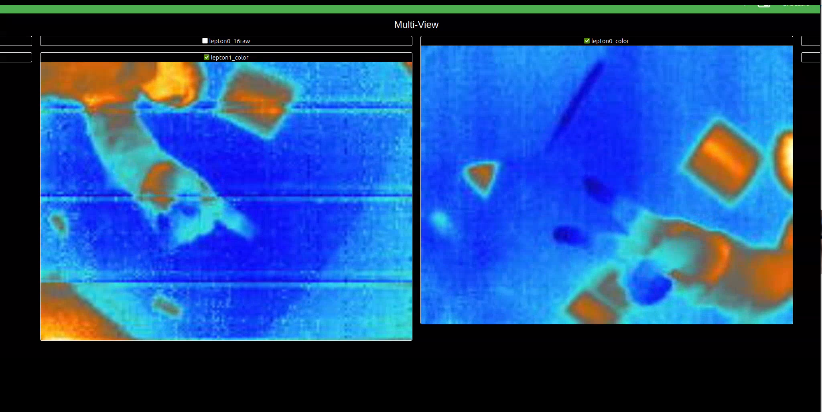
@Haxerus , that's great to hear! Can you clarify what you did? I am guessing the following:
- modify
voxl-lepton-serverto run multiple instances - disable i2c interface for the second lepton
Also, the image on the left seems noisy (horizontal lines)? I am not sure what it is, something to check.. (is it always present, what about when only single lepton is running).
Do you need anything else for any next steps?
Alex
- modify
-
@Haxerus , that's great to hear! Can you clarify what you did? I am guessing the following:
- modify
voxl-lepton-serverto run multiple instances - disable i2c interface for the second lepton
Also, the image on the left seems noisy (horizontal lines)? I am not sure what it is, something to check.. (is it always present, what about when only single lepton is running).
Do you need anything else for any next steps?
Alex
@Alex-Kushleyev sure thing. As per your suggestion, I modified
voxl-lepton-serverby moving all the Lepton camera-specific logic into a C++ class and added locks to any I2C operations to prevent race conditions. I then just created 2 instances of the LeptonCamera class I made which parse and publish the camera feeds to their own pipes which I can view in voxl-portal.I didn't need to disable any I2C interface for the second Lepton. I'm not too sure what you were referring to by that.
In regards to the horizontal line artifacts, those don't seems to consistently appear and I don't know what causes it. I'll investigate it further.
My next steps are to get the Leptons working with
voxl-open-vins-server. One question I had was that our VOXL 2 Mini appears to be running a service calledvoxl-lepton-trackerhowever I cannot find the source code for this anywhere on the voxl public GitLab. Was it removed or hidden? - modify
-
A Alex Kushleyev referenced this topic on
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login