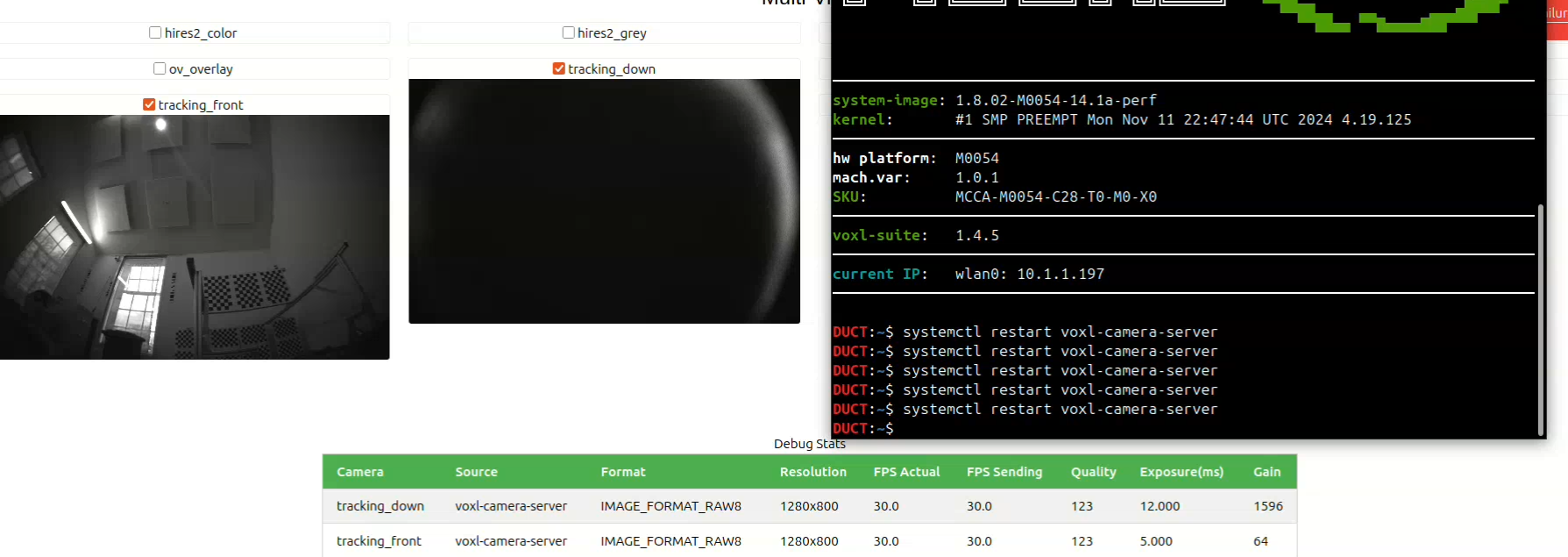
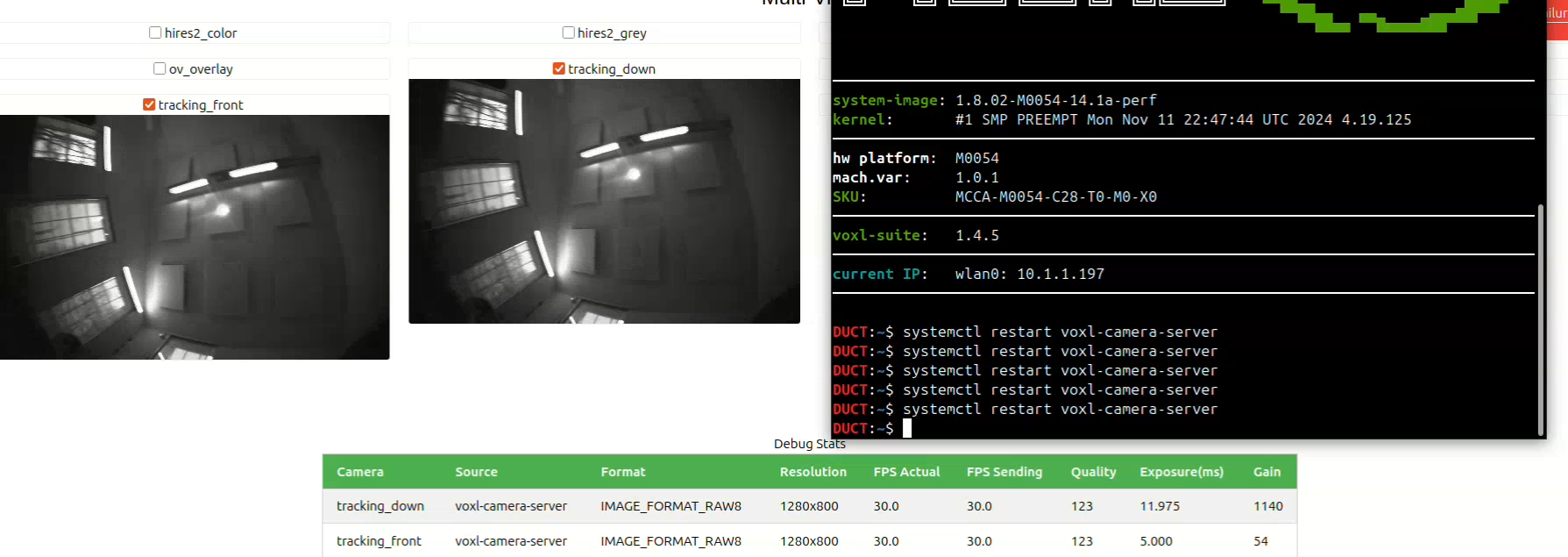
tracking down pipe switching to images of traccking front camera
-
Hello I am encountering a weird issue using the M0173 with 2 IMX412 cameras and 2 AR0144 cameras.
The streams of the tracking cameras start out correct when (re)starting the voxl-camera-server, but after some point the tracking_down seems to copy the tracking_front images. Do you maybe know a solution for this problem? or have you seen this happen before? any help would be appreciated.
I am using sdk 1.4.5 on the drone. -
Hello I am encountering a weird issue using the M0173 with 2 IMX412 cameras and 2 AR0144 cameras.
The streams of the tracking cameras start out correct when (re)starting the voxl-camera-server, but after some point the tracking_down seems to copy the tracking_front images. Do you maybe know a solution for this problem? or have you seen this happen before? any help would be appreciated.
I am using sdk 1.4.5 on the drone.@mark , we have seen this issue when using 10- or 12-bit drivers for the AR0144 tracking cameras. These drivers are shipped with the SDK but are not stable (for this exact reason).
Can you please confirm which ar0144 sensormodules you are using - you can check in
/usr/lib/camera.Alex
-
@mark , we have seen this issue when using 10- or 12-bit drivers for the AR0144 tracking cameras. These drivers are shipped with the SDK but are not stable (for this exact reason).
Can you please confirm which ar0144 sensormodules you are using - you can check in
/usr/lib/camera.Alex
hi @Alex-Kushleyev, i am not using the 10 or 12 bit drivers, everything was set up using
voxl-configure-cameras 28this is what the/usr/lib/camerafolder looks like (the .tuned files of the 412 camera were renamed in order to use the default .tuned files, which gave the best image for our application)

-
hi @Alex-Kushleyev, i am not using the 10 or 12 bit drivers, everything was set up using
voxl-configure-cameras 28this is what the/usr/lib/camerafolder looks like (the .tuned files of the 412 camera were renamed in order to use the default .tuned files, which gave the best image for our application)
@Alex-Kushleyev, By the way, as i was comparing this VOXL2 to one which does not have this same issue, i noticed that the board seemed to be an older one, could this have anything to do with it?
VOXL with the issue:

VOXL which behaves as expected:

-
@Alex-Kushleyev, By the way, as i was comparing this VOXL2 to one which does not have this same issue, i noticed that the board seemed to be an older one, could this have anything to do with it?
VOXL with the issue:
VOXL which behaves as expected:
@mark, thank you for the details. It should not matter whether M0054 or M0154 voxl is used.
Can you please do a test and disable both hires cameras and see if the issue is still reproducible? If the issue is gone, then enable one hires camera and test again.
Also, does setting cpu to perf mode help with this? (Voxl-set-cpu-mode perf)
I have never seen this happen with out stable camera configs, such as C28, so this is very odd!
Alex
-
@mark, thank you for the details. It should not matter whether M0054 or M0154 voxl is used.
Can you please do a test and disable both hires cameras and see if the issue is still reproducible? If the issue is gone, then enable one hires camera and test again.
Also, does setting cpu to perf mode help with this? (Voxl-set-cpu-mode perf)
I have never seen this happen with out stable camera configs, such as C28, so this is very odd!
Alex
Hi @Alex-Kushleyev i ran the tests, and it seems that the issue only occurs when both the hires cameras are enabled. when one or the other is disabled, this problem does not occur. Also running the CPU in performance does make it run normally longer, but the stream still switches.
Looking again at the images of the VOXLs i notice that a resistor in the bottom left of the frame is not placed in the m0054 version that is placed in the m0154 version. I placed a 100k resistance there (same as on the other resistances.) and that seemed to work, at least for this VOXL. Could it be that this is related to the I2C address of the camera or the VOXL? -
Hi @Alex-Kushleyev i ran the tests, and it seems that the issue only occurs when both the hires cameras are enabled. when one or the other is disabled, this problem does not occur. Also running the CPU in performance does make it run normally longer, but the stream still switches.
Looking again at the images of the VOXLs i notice that a resistor in the bottom left of the frame is not placed in the m0054 version that is placed in the m0154 version. I placed a 100k resistance there (same as on the other resistances.) and that seemed to work, at least for this VOXL. Could it be that this is related to the I2C address of the camera or the VOXL?@mark ,
Thank you for running the tests!
Regarding installing resistors without knowing what the function is - not recommended
") . I will look into what this resistor is. Are you saying that after installing this resistor, the issue is not reproducible?
. I will look into what this resistor is. Are you saying that after installing this resistor, the issue is not reproducible?I was going to ask you to do one more test, if you can reproduce the issue. If the issue is indeed at the very low level (the same image is returned for both cameras into
voxl-camera-server), then both instances of Auto Exposure algorithm would react to one camera's image changing. So the test would be..- reproduce the issue to get the same image appear in both camera streams, it seems like
tracking_frontis the one that is being duplicated - note the exposure and gain values, reported in the stats below the images
- quickly cover up the front camera (without affecting down-facing camera) and see if the expsure / gain of
tracking_downalso changes at all.- please note that if the image is indeed duplicated at a very low level, the Auto Exposure algorithm's output for the
tracking_downwill not actually affect the image (since the stream is fromtracking_front), but you should still see some changes while AE is converging after a sudden change. If there is no duplication of the image at the camera server, the AE behavior will not change fortracking_downcamera when you cover uptracking_front. I hope that makes sense.
- please note that if the image is indeed duplicated at a very low level, the Auto Exposure algorithm's output for the
Basically i am trying to figure out if this is a camera server issue or somewhere downstream.
Alex
- reproduce the issue to get the same image appear in both camera streams, it seems like
-
@mark ,
Thank you for running the tests!
Regarding installing resistors without knowing what the function is - not recommended
. I will look into what this resistor is. Are you saying that after installing this resistor, the issue is not reproducible?I was going to ask you to do one more test, if you can reproduce the issue. If the issue is indeed at the very low level (the same image is returned for both cameras into
voxl-camera-server), then both instances of Auto Exposure algorithm would react to one camera's image changing. So the test would be..- reproduce the issue to get the same image appear in both camera streams, it seems like
tracking_frontis the one that is being duplicated - note the exposure and gain values, reported in the stats below the images
- quickly cover up the front camera (without affecting down-facing camera) and see if the expsure / gain of
tracking_downalso changes at all.- please note that if the image is indeed duplicated at a very low level, the Auto Exposure algorithm's output for the
tracking_downwill not actually affect the image (since the stream is fromtracking_front), but you should still see some changes while AE is converging after a sudden change. If there is no duplication of the image at the camera server, the AE behavior will not change fortracking_downcamera when you cover uptracking_front. I hope that makes sense.
- please note that if the image is indeed duplicated at a very low level, the Auto Exposure algorithm's output for the
Basically i am trying to figure out if this is a camera server issue or somewhere downstream.
Alex
Hi @Alex-Kushleyev, Maybe is should have specified this, but I installed the resistor on another VOXl which had the same issue, but is unable to fly because of other reasons. I am still able to reproduce this issue with the original VOXL mentioned.
I did a test where i Covered up the
tracking_frontcamera while both streams gave the sane outtput.- The exposure and gain of the both camera's stay the same. Both when the
tracking_frontis covered, and when thetracking_downis covered. - When only
tracking_frontis covered, the exposure and gain increases. - when only
traccking_downis covered, non of the camera's increase their exposure or gain.
Let me know if you need me to run more tests, to try and figure thing out.
- reproduce the issue to get the same image appear in both camera streams, it seems like
-
Hi @Alex-Kushleyev, Maybe is should have specified this, but I installed the resistor on another VOXl which had the same issue, but is unable to fly because of other reasons. I am still able to reproduce this issue with the original VOXL mentioned.
I did a test where i Covered up the
tracking_frontcamera while both streams gave the sane outtput.- The exposure and gain of the both camera's stay the same. Both when the
tracking_frontis covered, and when thetracking_downis covered. - When only
tracking_frontis covered, the exposure and gain increases. - when only
traccking_downis covered, non of the camera's increase their exposure or gain.
Let me know if you need me to run more tests, to try and figure thing out.
Hi @mark , thanks again for confirming the results.
I will be testing this today and will get back to you.
Alex
- The exposure and gain of the both camera's stay the same. Both when the
-
Hi @mark , thanks again for confirming the results.
I will be testing this today and will get back to you.
Alex
@mark , i am testing this.. unable to reproduce it with the 8-bit drivers, but i can reproduce the behavior with 12-bit AR0144 drivers.
can you please test again while having
dmesg -wrunning in another terminal (with 8 bit standard AR0144 drivers) and see if you see something like the following when the camera feed starts being duplicated:thanks!
[ 1765.339349] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:3 ERROR_CRC [ 1765.939747] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:3 ERROR_CRC [ 1766.034093] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:3 ERROR_CRC [ 1766.067988] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:3 ERROR_CRC [ 1766.068475] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:3 ERROR_CRC [ 1766.071001] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:3 ERROR_CRC [ 1766.072165] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:3 ERROR_CRC [ 1766.100680] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:3 ERROR_CRC [ 1766.234702] CAM_INFO: CAM-ISP: cam_ife_csid_halt_csi2: 1931 CSID: 3 cnt: 1 Halt csi2 rx [ 1766.234714] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 0 CSIPHY index: 0 [ 1766.234719] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 103 PHY base addr= pK-error offset=0x8b0 size=11 [ 1766.234725] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR0 = 0xc4 [ 1766.234731] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR1 = 0x1 [ 1766.234737] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR2 = 0x0 [ 1766.234742] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR3 = 0x0 [ 1766.234748] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR4 = 0x0 [ 1766.234753] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR5 = 0x0 [ 1766.234758] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR6 = 0x7 [ 1766.234764] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR7 = 0x0 [ 1766.234769] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR8 = 0x60 [ 1766.234775] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR9 = 0x50 [ 1766.234780] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR10 = 0xc4 [ 1766.234784] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 1 CSIPHY index: 0 [ 1766.234788] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 2 CSIPHY index: 0 [ 1766.234791] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 3 CSIPHY index: 0 [ 1766.234795] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 4 CSIPHY index: 0 [ 1766.234798] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 5 CSIPHY index: 0 [ 1766.234813] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4616 idx 3 err 5 phy 0 lane type:0 ln num:1 ln cfg:0x2 cnt 1 [ 1766.234816] cam_csid_evt_bottom_half_handler: 1 callbacks suppressed [ 1766.234818] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI0: cc0 [ 1766.234822] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI1: 0 [ 1766.234824] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI2: 0 [ 1766.234827] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI3: 0 [ 1766.234830] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status TOP: 0 [ 1766.234833] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RX: 80011 [ 1766.234836] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status IPP: 0 [ 1766.234839] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status PPP: 0 [ 1766.234842] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status UDI0: 0 [ 1766.234844] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status UDI1: 0 -
@mark , i am testing this.. unable to reproduce it with the 8-bit drivers, but i can reproduce the behavior with 12-bit AR0144 drivers.
can you please test again while having
dmesg -wrunning in another terminal (with 8 bit standard AR0144 drivers) and see if you see something like the following when the camera feed starts being duplicated:thanks!
[ 1765.339349] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:3 ERROR_CRC [ 1765.939747] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:3 ERROR_CRC [ 1766.034093] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:3 ERROR_CRC [ 1766.067988] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:3 ERROR_CRC [ 1766.068475] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:3 ERROR_CRC [ 1766.071001] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:3 ERROR_CRC [ 1766.072165] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:3 ERROR_CRC [ 1766.100680] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:3 ERROR_CRC [ 1766.234702] CAM_INFO: CAM-ISP: cam_ife_csid_halt_csi2: 1931 CSID: 3 cnt: 1 Halt csi2 rx [ 1766.234714] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 0 CSIPHY index: 0 [ 1766.234719] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 103 PHY base addr= pK-error offset=0x8b0 size=11 [ 1766.234725] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR0 = 0xc4 [ 1766.234731] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR1 = 0x1 [ 1766.234737] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR2 = 0x0 [ 1766.234742] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR3 = 0x0 [ 1766.234748] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR4 = 0x0 [ 1766.234753] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR5 = 0x0 [ 1766.234758] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR6 = 0x7 [ 1766.234764] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR7 = 0x0 [ 1766.234769] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR8 = 0x60 [ 1766.234775] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR9 = 0x50 [ 1766.234780] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR10 = 0xc4 [ 1766.234784] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 1 CSIPHY index: 0 [ 1766.234788] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 2 CSIPHY index: 0 [ 1766.234791] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 3 CSIPHY index: 0 [ 1766.234795] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 4 CSIPHY index: 0 [ 1766.234798] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 5 CSIPHY index: 0 [ 1766.234813] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4616 idx 3 err 5 phy 0 lane type:0 ln num:1 ln cfg:0x2 cnt 1 [ 1766.234816] cam_csid_evt_bottom_half_handler: 1 callbacks suppressed [ 1766.234818] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI0: cc0 [ 1766.234822] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI1: 0 [ 1766.234824] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI2: 0 [ 1766.234827] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI3: 0 [ 1766.234830] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status TOP: 0 [ 1766.234833] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RX: 80011 [ 1766.234836] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status IPP: 0 [ 1766.234839] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status PPP: 0 [ 1766.234842] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status UDI0: 0 [ 1766.234844] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status UDI1: 0@Alex-Kushleyev
This is the output i get fromdmesg -w, the i put 2 enters at the place where the camera stream duplicates.
I do see the same error mesages as you sent, but only with id 6 instead of 3. I am quite certain i am using the 8-bit drives, since the files in/usr/lib/camera/do not specify 10_bit, or 12_bit, and the output format of the sensor is RAW8[ 420.109884] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Linked as a consumer to regulator.60 [ 420.109907] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Linked as a consumer to regulator.56 [ 420.109942] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Linked as a consumer to regulator.79 [ 420.123279] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 997 CAM_ACQUIRE_DEV Success, sensor_id:0x577,sensor_slave_addr:0x34 [ 420.180419] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Linked as a consumer to regulator.58 [ 420.182197] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Linked as a consumer to regulator.56 [ 420.184391] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Linked as a consumer to regulator.60 [ 420.184436] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Linked as a consumer to regulator.79 [ 420.194168] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:5 IPP resource not available [ 420.194171] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:4 IPP resource not available [ 420.194173] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:3 IPP resource not available [ 420.194175] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:2 IPP resource not available [ 420.194201] CAM_ERR: CAM-ISP: cam_ife_hw_mgr_print_acquire_info: 710 Successfully acquire single IFE[1 -1] with [11 pix] [0 pd] [0 rdi] ports for ctx:0 [ 420.199051] CAM_INFO: CAM-CSIPHY: cam_csiphy_core_cfg: 1137 START_DEV: CSIPHY_IDX: 1, Device_slot: 0, Datarate: 1500000000, Settletime: 2200000000 [ 420.204368] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 997 CAM_ACQUIRE_DEV Success, sensor_id:0x356,sensor_slave_addr:0x30 [ 420.207707] CAM_INFO: CAM-ISP: cam_vfe_bus_ver3_init_hw: 3659 Overriding clock gating at bus input [ 420.207712] CAM_INFO: CAM-ISP: cam_vfe_top_ver3_init_hw: 246 Disable clock gating at IFE top [ 420.207731] CAM_ERR: CAM-ISP: cam_ife_mgr_start_hw: 4510 ->Config HW, 000000002005597e [ 420.208476] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 1089 CAM_START_DEV Success, sensor_id:0x577,sensor_slave_addr:0x34 [ 420.217046] CAM_INFO: CAM-ISP: __cam_isp_ctx_sof_in_epoch: 1660 First SOF in EPCR ctx:3 frame_id:1 next substate EPOCH [ 420.291920] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:5 IPP resource not available [ 420.291923] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:4 IPP resource not available [ 420.291925] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:3 IPP resource not available [ 420.291926] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:2 IPP resource not available [ 420.291947] CAM_ERR: CAM-ISP: cam_ife_hw_mgr_print_acquire_info: 710 Successfully acquire single IFE[0 -1] with [11 pix] [0 pd] [0 rdi] ports for ctx:4 [ 420.297184] CAM_INFO: CAM-CSIPHY: cam_csiphy_core_cfg: 1137 START_DEV: CSIPHY_IDX: 2, Device_slot: 0, Datarate: 1500000000, Settletime: 2200000000 [ 420.305641] CAM_INFO: CAM-ISP: cam_vfe_bus_ver3_init_hw: 3659 Overriding clock gating at bus input [ 420.305645] CAM_INFO: CAM-ISP: cam_vfe_top_ver3_init_hw: 246 Disable clock gating at IFE top [ 420.305659] CAM_ERR: CAM-ISP: cam_ife_mgr_start_hw: 4510 ->Config HW, 000000002005597e [ 420.306460] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 1089 CAM_START_DEV Success, sensor_id:0x577,sensor_slave_addr:0x34 [ 420.315030] CAM_INFO: CAM-ISP: __cam_isp_ctx_sof_in_epoch: 1660 First SOF in EPCR ctx:4 frame_id:1 next substate EPOCH [ 420.531299] CAM_ERR: CAM-ISP: cam_ife_hw_mgr_print_acquire_info: 710 Successfully acquire single IFE[5 -1] with [0 pix] [0 pd] [1 rdi] ports for ctx:5 [ 420.532371] CAM_INFO: CAM-CSIPHY: cam_csiphy_core_cfg: 1137 START_DEV: CSIPHY_IDX: 0, Device_slot: 1, Datarate: 592000000, Settletime: 2800000000 [ 420.533160] CAM_INFO: CAM-ISP: cam_vfe_bus_ver3_init_hw: 3659 Overriding clock gating at bus input [ 420.533164] CAM_INFO: CAM-ISP: cam_vfe_top_ver3_init_hw: 246 Disable clock gating at IFE top [ 420.533174] CAM_ERR: CAM-ISP: cam_ife_mgr_start_hw: 4510 ->Config HW, 000000002005597e [ 420.555764] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 1089 CAM_START_DEV Success, sensor_id:0x356,sensor_slave_addr:0x30 [ 423.218172] cam_ife_csid_irq: 73 callbacks suppressed [ 423.218177] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 423.218949] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 423.222473] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 424.215015] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 424.215712] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 424.218606] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 425.214507] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 425.215872] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 425.215911] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 425.216231] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.211853] cam_ife_csid_irq: 8 callbacks suppressed [ 429.211856] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.211948] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212130] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212208] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212289] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212672] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212811] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212943] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.213919] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.214209] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214444] cam_ife_csid_irq: 45 callbacks suppressed [ 434.214448] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214659] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214698] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214739] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214778] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214818] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214838] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214858] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214878] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214898] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.215584] CAM_INFO: CAM-ISP: cam_ife_csid_halt_csi2: 1931 CSID: 6 cnt: 1 Halt csi2 rx [ 434.215593] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 0 CSIPHY index: 0 [ 434.215597] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 103 PHY base addr= pK-error offset=0x8b0 size=11 [ 434.215602] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR0 = 0xc4 [ 434.215607] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR1 = 0x1 [ 434.215611] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR2 = 0x0 [ 434.215616] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR3 = 0x0 [ 434.215620] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR4 = 0x0 [ 434.215625] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR5 = 0x0 [ 434.215629] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR6 = 0x7 [ 434.215633] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR7 = 0x0 [ 434.215638] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR8 = 0x60 [ 434.215642] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR9 = 0x50 [ 434.215647] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR10 = 0xc4 [ 434.215650] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 1 CSIPHY index: 0 [ 434.215653] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 2 CSIPHY index: 0 [ 434.215655] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 3 CSIPHY index: 0 [ 434.215658] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 4 CSIPHY index: 0 [ 434.215660] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 5 CSIPHY index: 0 [ 434.215673] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4616 idx 6 err 5 phy 0 lane type:0 ln num:1 ln cfg:0x2 cnt 1 [ 434.215675] cam_csid_evt_bottom_half_handler: 1 callbacks suppressed [ 434.215677] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI0: cc0 [ 434.215678] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI1: 0 [ 434.215681] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI2: 0 [ 434.215683] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI3: 0 [ 434.215685] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status TOP: 0 [ 434.215687] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RX: 80011 [ 434.215689] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status IPP: 0 [ 434.215691] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status PPP: 0 [ 434.215693] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status UDI0: 0 [ 434.215694] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status UDI1: 0 -
@Alex-Kushleyev
This is the output i get fromdmesg -w, the i put 2 enters at the place where the camera stream duplicates.
I do see the same error mesages as you sent, but only with id 6 instead of 3. I am quite certain i am using the 8-bit drives, since the files in/usr/lib/camera/do not specify 10_bit, or 12_bit, and the output format of the sensor is RAW8[ 420.109884] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Linked as a consumer to regulator.60 [ 420.109907] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Linked as a consumer to regulator.56 [ 420.109942] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Linked as a consumer to regulator.79 [ 420.123279] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 997 CAM_ACQUIRE_DEV Success, sensor_id:0x577,sensor_slave_addr:0x34 [ 420.180419] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Linked as a consumer to regulator.58 [ 420.182197] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Linked as a consumer to regulator.56 [ 420.184391] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Linked as a consumer to regulator.60 [ 420.184436] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Linked as a consumer to regulator.79 [ 420.194168] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:5 IPP resource not available [ 420.194171] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:4 IPP resource not available [ 420.194173] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:3 IPP resource not available [ 420.194175] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:2 IPP resource not available [ 420.194201] CAM_ERR: CAM-ISP: cam_ife_hw_mgr_print_acquire_info: 710 Successfully acquire single IFE[1 -1] with [11 pix] [0 pd] [0 rdi] ports for ctx:0 [ 420.199051] CAM_INFO: CAM-CSIPHY: cam_csiphy_core_cfg: 1137 START_DEV: CSIPHY_IDX: 1, Device_slot: 0, Datarate: 1500000000, Settletime: 2200000000 [ 420.204368] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 997 CAM_ACQUIRE_DEV Success, sensor_id:0x356,sensor_slave_addr:0x30 [ 420.207707] CAM_INFO: CAM-ISP: cam_vfe_bus_ver3_init_hw: 3659 Overriding clock gating at bus input [ 420.207712] CAM_INFO: CAM-ISP: cam_vfe_top_ver3_init_hw: 246 Disable clock gating at IFE top [ 420.207731] CAM_ERR: CAM-ISP: cam_ife_mgr_start_hw: 4510 ->Config HW, 000000002005597e [ 420.208476] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 1089 CAM_START_DEV Success, sensor_id:0x577,sensor_slave_addr:0x34 [ 420.217046] CAM_INFO: CAM-ISP: __cam_isp_ctx_sof_in_epoch: 1660 First SOF in EPCR ctx:3 frame_id:1 next substate EPOCH [ 420.291920] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:5 IPP resource not available [ 420.291923] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:4 IPP resource not available [ 420.291925] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:3 IPP resource not available [ 420.291926] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:2 IPP resource not available [ 420.291947] CAM_ERR: CAM-ISP: cam_ife_hw_mgr_print_acquire_info: 710 Successfully acquire single IFE[0 -1] with [11 pix] [0 pd] [0 rdi] ports for ctx:4 [ 420.297184] CAM_INFO: CAM-CSIPHY: cam_csiphy_core_cfg: 1137 START_DEV: CSIPHY_IDX: 2, Device_slot: 0, Datarate: 1500000000, Settletime: 2200000000 [ 420.305641] CAM_INFO: CAM-ISP: cam_vfe_bus_ver3_init_hw: 3659 Overriding clock gating at bus input [ 420.305645] CAM_INFO: CAM-ISP: cam_vfe_top_ver3_init_hw: 246 Disable clock gating at IFE top [ 420.305659] CAM_ERR: CAM-ISP: cam_ife_mgr_start_hw: 4510 ->Config HW, 000000002005597e [ 420.306460] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 1089 CAM_START_DEV Success, sensor_id:0x577,sensor_slave_addr:0x34 [ 420.315030] CAM_INFO: CAM-ISP: __cam_isp_ctx_sof_in_epoch: 1660 First SOF in EPCR ctx:4 frame_id:1 next substate EPOCH [ 420.531299] CAM_ERR: CAM-ISP: cam_ife_hw_mgr_print_acquire_info: 710 Successfully acquire single IFE[5 -1] with [0 pix] [0 pd] [1 rdi] ports for ctx:5 [ 420.532371] CAM_INFO: CAM-CSIPHY: cam_csiphy_core_cfg: 1137 START_DEV: CSIPHY_IDX: 0, Device_slot: 1, Datarate: 592000000, Settletime: 2800000000 [ 420.533160] CAM_INFO: CAM-ISP: cam_vfe_bus_ver3_init_hw: 3659 Overriding clock gating at bus input [ 420.533164] CAM_INFO: CAM-ISP: cam_vfe_top_ver3_init_hw: 246 Disable clock gating at IFE top [ 420.533174] CAM_ERR: CAM-ISP: cam_ife_mgr_start_hw: 4510 ->Config HW, 000000002005597e [ 420.555764] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 1089 CAM_START_DEV Success, sensor_id:0x356,sensor_slave_addr:0x30 [ 423.218172] cam_ife_csid_irq: 73 callbacks suppressed [ 423.218177] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 423.218949] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 423.222473] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 424.215015] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 424.215712] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 424.218606] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 425.214507] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 425.215872] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 425.215911] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 425.216231] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.211853] cam_ife_csid_irq: 8 callbacks suppressed [ 429.211856] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.211948] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212130] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212208] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212289] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212672] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212811] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212943] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.213919] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.214209] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214444] cam_ife_csid_irq: 45 callbacks suppressed [ 434.214448] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214659] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214698] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214739] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214778] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214818] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214838] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214858] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214878] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214898] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.215584] CAM_INFO: CAM-ISP: cam_ife_csid_halt_csi2: 1931 CSID: 6 cnt: 1 Halt csi2 rx [ 434.215593] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 0 CSIPHY index: 0 [ 434.215597] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 103 PHY base addr= pK-error offset=0x8b0 size=11 [ 434.215602] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR0 = 0xc4 [ 434.215607] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR1 = 0x1 [ 434.215611] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR2 = 0x0 [ 434.215616] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR3 = 0x0 [ 434.215620] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR4 = 0x0 [ 434.215625] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR5 = 0x0 [ 434.215629] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR6 = 0x7 [ 434.215633] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR7 = 0x0 [ 434.215638] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR8 = 0x60 [ 434.215642] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR9 = 0x50 [ 434.215647] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR10 = 0xc4 [ 434.215650] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 1 CSIPHY index: 0 [ 434.215653] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 2 CSIPHY index: 0 [ 434.215655] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 3 CSIPHY index: 0 [ 434.215658] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 4 CSIPHY index: 0 [ 434.215660] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 5 CSIPHY index: 0 [ 434.215673] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4616 idx 6 err 5 phy 0 lane type:0 ln num:1 ln cfg:0x2 cnt 1 [ 434.215675] cam_csid_evt_bottom_half_handler: 1 callbacks suppressed [ 434.215677] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI0: cc0 [ 434.215678] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI1: 0 [ 434.215681] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI2: 0 [ 434.215683] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI3: 0 [ 434.215685] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status TOP: 0 [ 434.215687] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RX: 80011 [ 434.215689] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status IPP: 0 [ 434.215691] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status PPP: 0 [ 434.215693] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status UDI0: 0 [ 434.215694] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status UDI1: 0@mark , thank you for confirming. The error is the same that i am observing. It should not matter whether it is 8 or 12 bit image (in your case it is 8 bit).
In my case the issue happens on M0154 board. I don't think M0054 vs M0154 makes any difference.
Just to clarify what is actually happening..
The issue starts with some CRC errors (interference between multiple cameras, it seems). In my case, the rate of CRC errors depends on the position of the ucoax cables. (you can also watch these CRC errors and move the coax cables for the second tracking camera).
If the error occurs at a critical point (such as beginning of the frame), the camera pipeline reports a critical problem and should produce an error in the camera pipeline.
The correct behavior should be that the problematic camera stops streaming and in latest SDK, it will actually be restarted and stream will recover. However, the camera is never stopped, instead it reports a duplicate image from the other tracking camera.
We are investigating the root cause, as it is somewhere low level in the camera stack (not in
voxl-camera-server).Alex
-
@mark , thank you for confirming. The error is the same that i am observing. It should not matter whether it is 8 or 12 bit image (in your case it is 8 bit).
In my case the issue happens on M0154 board. I don't think M0054 vs M0154 makes any difference.
Just to clarify what is actually happening..
The issue starts with some CRC errors (interference between multiple cameras, it seems). In my case, the rate of CRC errors depends on the position of the ucoax cables. (you can also watch these CRC errors and move the coax cables for the second tracking camera).
If the error occurs at a critical point (such as beginning of the frame), the camera pipeline reports a critical problem and should produce an error in the camera pipeline.
The correct behavior should be that the problematic camera stops streaming and in latest SDK, it will actually be restarted and stream will recover. However, the camera is never stopped, instead it reports a duplicate image from the other tracking camera.
We are investigating the root cause, as it is somewhere low level in the camera stack (not in
voxl-camera-server).Alex
Hi @Alex-Kushleyev, thanks for the help. I have been trying a few configuration, different combinations with camera's cables, and coax boards. For my case it seems that the cable was not the issue but the camera. After changing this I have not seen it happen again.
-
Hi @Alex-Kushleyev, thanks for the help. I have been trying a few configuration, different combinations with camera's cables, and coax boards. For my case it seems that the cable was not the issue but the camera. After changing this I have not seen it happen again.
Hi @mark ,
Thank you for the update. We will keep investigating the underlying issue that was a result of that questionable camera.
Meanwhile, if you think that the camera is defective and has no damage, you can fill out an RMA request and send it back for an exchange. I cant really comment on what could be causing this on the camera itself (it would be interesting to try it), but the camera is not serviceable by the user.
Repair Merchandise Authorization
All of our products are thoroughly tested both functionally and physically prior to shipment. For a copy of your products test records, please message at contact@modalai.com with the serial number. For troubleshooting and software functionality questions, please refer to our forum. View our terms and conditions. If an

ModalAI, Inc. (www.modalai.com)
Alex
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login