Unresponsive polling from FPV Racing 4-in-1 ESC
-
Hello,
I'm calibrating the FPV Racing 4-in-1 ESC on the VOXL2 itself (not connected directly to the ESC via FTDI). When performing either the calibration (
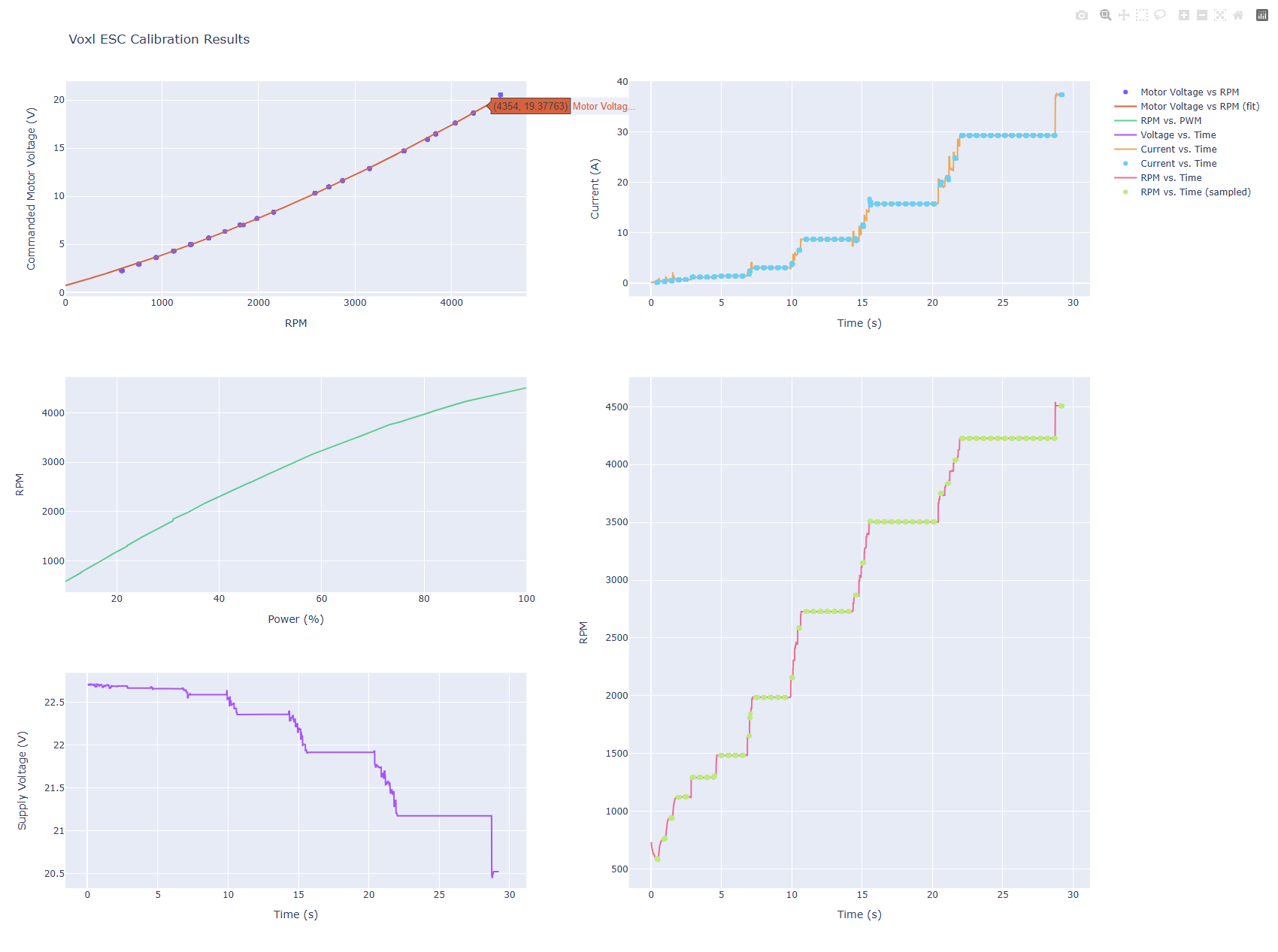
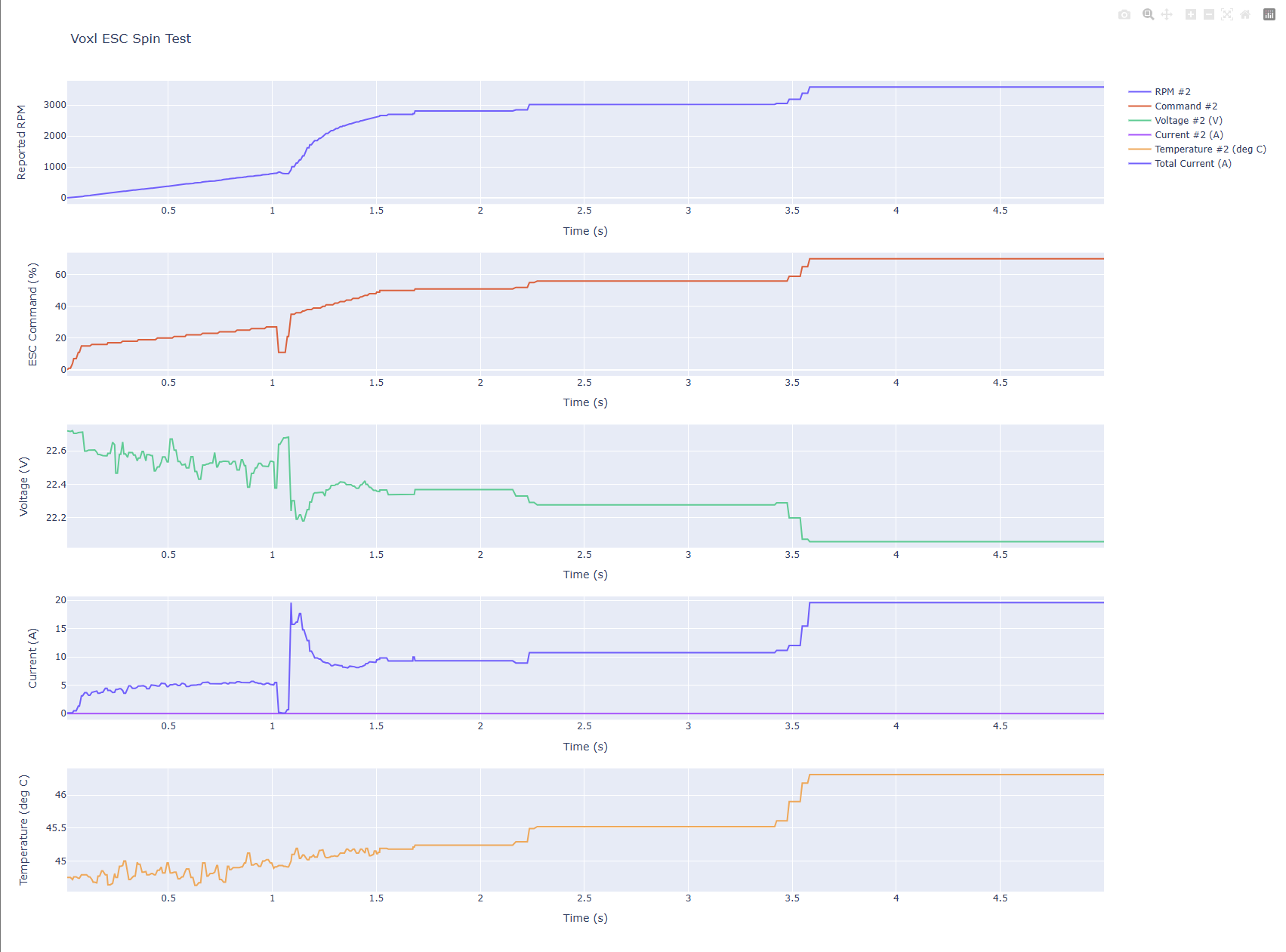
./voxl-esc-calibrate.py --id 2 --pwm-min 10 --pwm-max 95) or the power ramp test (./voxl-esc-spin.py --id 2 --power 100 --ramp-time 3.0 --timeout 5.0 --enable-plot 1 --cmd-rate 250), there are several instances were the y-values do not change for secondsThe behavior is more readily seen in the power ramp test, since commanded values are continuous, whereas in the calibration test, a specific value is commanded for a given time period. Still, you can see in the calibration results that y value doesn't change any for far longer than the default step duration of 0.5 seconds
Looking at the calibrate script, seems that the returned values from:
esc.get_current()esc.get_power()esc.get_rpm()esc.get_voltage()esc.get_temperature()
are directly print to terminal, and not some other variable hanging around that maybe doesn't update.
@Alex-Kushleyev has this behavior been seen? Any recommendations? It is difficult to tune commutation when values are not updated. The interesting pattern showing itself through repeated runs of the script is that the "duration unresponsiveness" increases as commanded power increases
The following is output from
voxl-esc scan:voxl2:/usr/share/modalai/voxl-esc-tools$ voxl-esc scan enabling bridge bridge enabled Detected Python version : 3.6.9 (default, Mar 10 2023, 16:46:00) [GCC 8.4.0] Found voxl-esc tools bin version: 1.9 VOXL Platform: M0054 Detected RB5 Flight, VOXL2 M0054 or M0104! INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000 Sending library name request: libslpi_qrb5165_io.so Sending initialization request INFO: ESC(s) detected on port: /dev/slpi-uart-2, baud rate: 2000000, protocol: firmware INFO: ESC Information: INFO: --------------------- ID : 0 Board : version 42: ModalAi 4-in-1 ESC (M0138-1) UID : 0x20373835464757130049002F Firmware : version 39.20, hash 9c6233d6 Bootloader : version 184, hash e1c038de ID : 1 Board : version 42: ModalAi 4-in-1 ESC (M0138-1) UID : 0x203738354647571300420025 Firmware : version 39.20, hash 9c6233d6 Bootloader : version 184, hash e1c038de ID : 2 Board : version 42: ModalAi 4-in-1 ESC (M0138-1) UID : 0x20373835464757130049002A Firmware : version 39.20, hash 9c6233d6 Bootloader : version 184, hash e1c038de ID : 3 Board : version 42: ModalAi 4-in-1 ESC (M0138-1) UID : 0x20373835464757130042002A Firmware : version 39.20, hash 9c6233d6 Bootloader : version 184, hash e1c038de --------------------- successfully pinged ESCs disabling bridge Sending kill slpi command! bridge disabledI've also included the xml, calibration_results.html, and spin_results.html
The motor is a Hobbyking CM X6 SE 280KV, a low KV motor.
I am following the steps outlined in:
- calibration.md
- low_kv_motor_tuning.md
- and guidance from this thread
Here is my XML
<?xml version="1.0" encoding="UTF-8"?> <!-- Copyright (c) 2025 ModalAI Inc. Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met: 1. Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer. 2. Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution. 3. Neither the name of the copyright holder nor the names of its contributors may be used to endorse or promote products derived from this software without specific prior written permission. 4. The Software is used solely in conjunction with devices provided by ModalAI Inc. THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. For a license to use on non-ModalAI hardware, please contact license@modalai.com --> <EscParameters> <IdParams> <param name="id" value="127"/> <!-- ID assignment is fixed. Do not change --> <param name="dir" value="2"/> <!-- 0=fwd, 1=rev, 2=fwd id-based, 3=rev id-based --> </IdParams> <UartParams> <param name="protocol_version" value="2"/> <!-- reserved for future use --> <param name="input_mode" value="0"/> <!-- reserved for future use --> <param name="baud_rate" value="2000000"/> <!-- communication bit rate --> <param name="char_timeout_ns" value="0"/> <!-- not used --> <param name="cmd_timeout_ns" value="100000000"/> <!-- timeout for incoming commands before ESC will stop the motor --> </UartParams> <TuneParams> <param name="pwm_frequency" value="48000"/> <!-- 24Khz is the only option for Tmotor board to reduce Mosfet switching losses --> <param name="vbat_nominal_mv" value="22200"/> <!-- used for sanity checking and limiting of voltage-dependent funcions --> <param name="num_cycles_per_rev" value="14"/> <!-- number of pole pairs in the motor. used for converting electrical frequency to mechanical rpm --> <param name="min_rpm" value="577"/> <!-- minimum RPM that will be attempted, otherwise capped --> <param name="max_rpm" value="4626"/> <!-- maximum RPM that will be attempted, otherwise capped --> <param name="min_pwm" value="100"/> <!-- cap for minimum power to be ever applied. max is 999 --> <param name="max_pwm" value="999"/> <!-- cap for maximum power to be ever applied. max is 999 --> <param name="pwm_vs_rpm_curve_a0" value="784.739381143"/> <!-- this is actually motor_voltage vs rpm curve.. using legacy naming --> <param name="pwm_vs_rpm_curve_a1" value="2.77418758498"/> <!-- --> <param name="pwm_vs_rpm_curve_a2" value="0.000345512059078"/> <param name="kp" value="50"/> <!-- 100... RPM controller proportional gain --> <param name="ki" value="10"/> <!-- 10.. RPM controller proportional gain --> <param name="max_kpe" value="100"/> <!-- maximum proportional erorr term (max is 999) --> <param name="max_kie" value="50"/> <!-- maximum integral error term (max is 999) --> <param name="max_rpm_delta" value="5000"/> <!-- cap for maximum rpm error used in RPM controller --> <param name="spinup_type" value="1"/> <!-- 0: traditional, 1: sinusoidal . Sinusoidal is not yet implemented on this board--> <param name="spinup_power" value="150"/> <!-- power used to during spin-up procedure (out of 999)--> <param name="latch_power" value="120"/> <!-- power used during latching stage of spin-up (out of 999)--> <param name="spinup_power_ramp" value="8"/> <!-- it will take ( 4096 / (spinup_power_ramp*10000) ) seconds to ramp sinusoidal start-up power from 0 to spinup_power. Not yet implemented. --> <param name="spinup_rpm_target" value="800"/> <!-- Desired RPM at the end of the sinusoidal spin-up procedure. Not yet implemented. --> <param name="spinup_time_ms" value="1000"/> <!-- Duration of the sinusoidal spin-up procedure. Not yet implemented. --> <param name="spinup_bemf_comp" value="1"/> <!-- 0: disable, 1:enable back-emf compensation in sinusoidal spin-up procedure. --> <param name="motor_kv" value="280"/> <!-- kV value of the motor. used in back-emf compensation during spin-up. --> <param name="min_num_cross_for_closed_loop" value="50"/> <!-- exit latching mode of fixed power after this number of zero crossings --> <param name="protection_stall_check_rpm" value="500"/> <!-- if motor spins below this RPM, stall check will trigger and stop / restart the motor --> <param name="protection_current_soft_limit_a" value="0"/> <!-- over-current soft limit (will limit power to try to stay under the current limit). Only applicable to ESCs with individual current sensing --> <param name="protection_trip_current_a" value="0"/> <!-- over-current hard limit (will stop the motor) after 100ms. Only applicable to ESCs with individual current sensing --> <param name="brake_to_stop" value="0"/> <!-- apply brake when stopping motor (or not) --> <param name="stall_timeout_ns" value="20000000"/> <!-- after spin-up, if no zero crossing is not detected for this amount of time, motor is considered stalled --> <param name="require_reset_if_stalled" value="0"/> <!-- require sending an array of zero commands to reset before next spin-up, if motor stalled --> <!--one beep--> <param name="tone_freqs" value="[200, 200,240, 200, 0,0,0,0, 0,0,0,0]"/> <!-- 200 is 2000Hz, max 255 --> <param name="tone_durations" value="[20, 0, 20, 0, 0,0,0,0, 0,0,0,0]"/> <!-- duration of each tone in units of 10 milli-seconds. Poor naming!!! --> <param name="tone_powers" value="[50, 0, 50, 0, 0,0,0,0, 0,0,0,0]"/> <!-- max is 255 --> <param name="dt_threshold_ns" value="150000"/> <!-- during start up, ignore inter-commutation times less than this val, probably noise --> <param name="max_dt_ns" value="2500000"/> <!-- min and max values for time between two commutations. these are used as caps --> <param name="min_dt_ns" value="50000"/> <param name="dt_bootstrap_ns" value="2000000"/> <!-- filter bootstrap value for commutation dt during start up --> <param name="spinup_stall_dt_ns" value="6000000"/> <!-- during spin-up, if no zero crossing is not detected for this amount of time, motor is considered stalled --> <param name="spinup_stall_check_ns" value="30000000"/> <!-- time after beginning of spinup to start checking for spinup stall --> <param name="alignment_time_ns" value="0"/> <!-- alignment time before spin-up. not really needed --> <param name="timing_advance" value="60"/> <!-- positive value -> earlier commutation. helps avoid de-syncs if demag time is long. default: 60. absolute maximum is 90 --> <param name="sense_advance" value="10"/> <!-- positive value -> delayed zero crossing sensing. default: 20. absolute maximum is 45 (not recommended above 20)--> <param name="demag_timing" value="1"/> <!-- zero crossing timing tweak. default: 0. set to 1 for low kV (< 500kV) motors to reduce chance of de-sync. do not set to 1 if RPM can exceed 100K eRPM --> </TuneParams> </EscParameters> -
@shawn_ricardo , your issue looks identical to this one : https://forum.modalai.com/topic/4476/esc-calibration-help
When the values seem to be "stuck" and don't change for seconds, does the actual motor behavior also reflect that? in other words, does the motor RPM also get stuck? You would definitely hear the uneven transitions during the calibration procedure.
I have not had a chance to look at it, but there must be something up when running this script on VOXL2.
Can you please try the same calibration script after setting the voxl2 cpu to perf mode?
voxl-set-cpu-mode perf. I will also try it.Do you have a chance to try the calibration procedure while connecting the ESC to a Linux PC?
Alex
-
For the ramp test, the motor doesn't get stuck. I hear a smooth transition up to 95% power and the motor maintains that power for the timeout duration. Same for the calibration script. I hear the motor change speeds at the default duration of 0.5 seconds.
Regarding the post's comment:
"We calibrate from 10% - 95% per the instructions, but no matter the ESC/motor, the calibration process maxes out at around 60 - 70% power (11k - 13k RPM)."This happens because the loop in the script is tracking a variable that is set / updated only from within the script itself, rather than from
esc.get_power(). When I updated the script to set the current power variable to the value returned byesc.get_power(), the loop actually goes to the max power specified. The downside here is that, given my current setup, although the command power seems to be accepted and implemented by the ESC, the returned value fromesc.get_power()is not correctly reflected -- so the physical motor is spinning faster than the ESC is reporting and the loop continues to command the user definedMAX_POWERfor a long time until the ESC catches up. I suppose one could update the loop to only increase commanded values once the returned value is verified, but for debugging purposes, the above is sufficient.I believe I did have the voxl in perf mode, but will try setting testing it again. As well as on a linux PC (i'll be using the same WSL as in the linked post, so maybe i could just try a container on the voxl with updated python)
-
@shawn_ricardo , thank you for the details. i will investigate shortly.
Also, just wanted to mention, your motor kV is very low, i don't think we have tested anything below ~400. So you should definitely put the ESC through sufficient testing to ensure that there are no de-syncs. For the tests, i definitely recommend running them from your desktop / laptop, as you get more instant feedback (plots) and can iterate much more quickly. If you need more details for the testing, let me know, but obviously the first step is to get a good calibration done. The step tests, etc, are listed in the low kv tuning guide.
Alex
-
The voxl in perf mode didn't make a difference.
Using the FTDI cable on a linux PC did make a difference, however. I was able to tune!
Interestingly, calibration and power ramp test both track the plots referenced in the documentation. that is, continuous curves were obtained. These images are:
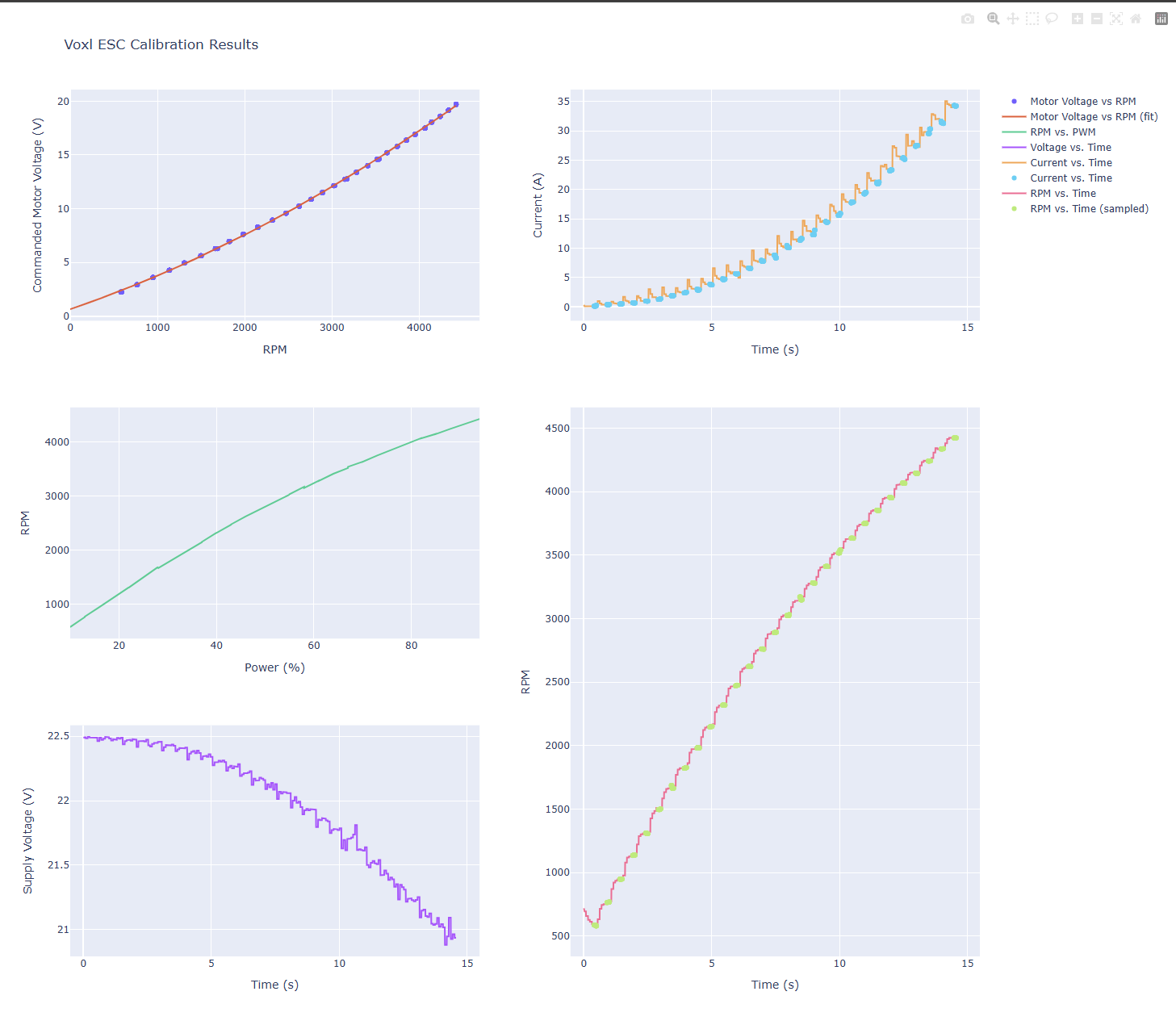
However, the power step test and RPM step tests deviate significantly from reference in that they are not continuous.
I am running command provided from documentation, and obtain similar results for power/rpm
-
./voxl-esc-spin-step.py --id 3 --power 20 --step-delay 1.5 --step-frequency 2 --timeout 3 --enable-plot 1 --cmd-rate 250 --step-amplitude 30 -
./voxl-esc-spin-step.py --id 3 --rpm 2000 --step-delay 1.5 --step-frequency 1 --timeout 3.0 --enable-plot 1 --cmd-rate 250 --step-amplitude 2000

The XML file I am running is:
<?xml version="1.0" encoding="UTF-8"?> <!-- Copyright (c) 2025 ModalAI Inc. Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met: 1. Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer. 2. Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution. 3. Neither the name of the copyright holder nor the names of its contributors may be used to endorse or promote products derived from this software without specific prior written permission. 4. The Software is used solely in conjunction with devices provided by ModalAI Inc. THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. For a license to use on non-ModalAI hardware, please contact license@modalai.com --> <EscParameters> <IdParams> <param name="id" value="127"/> <!-- ID assignment is fixed. Do not change --> <param name="dir" value="2"/> <!-- 0=fwd, 1=rev, 2=fwd id-based, 3=rev id-based --> </IdParams> <UartParams> <param name="protocol_version" value="2"/> <!-- reserved for future use --> <param name="input_mode" value="0"/> <!-- reserved for future use --> <param name="baud_rate" value="2000000"/> <!-- communication bit rate --> <param name="char_timeout_ns" value="0"/> <!-- not used --> <param name="cmd_timeout_ns" value="100000000"/> <!-- timeout for incoming commands before ESC will stop the motor --> </UartParams> <TuneParams> <param name="pwm_frequency" value="48000"/> <!-- 24Khz is the only option for Tmotor board to reduce Mosfet switching losses --> <param name="vbat_nominal_mv" value="22200"/> <!-- used for sanity checking and limiting of voltage-dependent funcions --> <param name="num_cycles_per_rev" value="14"/> <!-- number of pole pairs in the motor. used for converting electrical frequency to mechanical rpm --> <param name="min_rpm" value="583"/> <!-- minimum RPM that will be attempted, otherwise capped --> <param name="max_rpm" value="4667"/> <!-- maximum RPM that will be attempted, otherwise capped --> <param name="min_pwm" value="100"/> <!-- cap for minimum power to be ever applied. max is 999 --> <param name="max_pwm" value="999"/> <!-- cap for maximum power to be ever applied. max is 999 --> <param name="pwm_vs_rpm_curve_a0" value="686.0452226861742"/> <!-- this is actually motor_voltage vs rpm curve.. using legacy naming --> <param name="pwm_vs_rpm_curve_a1" value="2.853400603807748"/> <!-- --> <param name="pwm_vs_rpm_curve_a2" value="0.0003301049839666"/> <param name="kp" value="12"/> <!-- 100... RPM controller proportional gain --> <param name="ki" value="2"/> <!-- 10.. RPM controller proportional gain --> <param name="max_kpe" value="30"/> <!-- maximum proportional erorr term (max is 999) --> <param name="max_kie" value="15"/> <!-- maximum integral error term (max is 999) --> <param name="max_rpm_delta" value="1200"/> <!-- cap for maximum rpm error used in RPM controller --> <param name="spinup_type" value="1"/> <!-- 0: traditional, 1: sinusoidal . Sinusoidal is not yet implemented on this board--> <param name="spinup_power" value="150"/> <!-- power used to during spin-up procedure (out of 999)--> <param name="latch_power" value="120"/> <!-- power used during latching stage of spin-up (out of 999)--> <param name="spinup_power_ramp" value="8"/> <!-- it will take ( 4096 / (spinup_power_ramp*10000) ) seconds to ramp sinusoidal start-up power from 0 to spinup_power. Not yet implemented. --> <param name="spinup_rpm_target" value="800"/> <!-- Desired RPM at the end of the sinusoidal spin-up procedure. Not yet implemented. --> <param name="spinup_time_ms" value="1000"/> <!-- Duration of the sinusoidal spin-up procedure. Not yet implemented. --> <param name="spinup_bemf_comp" value="1"/> <!-- 0: disable, 1:enable back-emf compensation in sinusoidal spin-up procedure. --> <param name="motor_kv" value="280"/> <!-- kV value of the motor. used in back-emf compensation during spin-up. --> <param name="min_num_cross_for_closed_loop" value="90"/> <!-- exit latching mode of fixed power after this number of zero crossings --> <param name="protection_stall_check_rpm" value="500"/> <!-- if motor spins below this RPM, stall check will trigger and stop / restart the motor --> <param name="protection_current_soft_limit_a" value="0"/> <!-- over-current soft limit (will limit power to try to stay under the current limit). Only applicable to ESCs with individual current sensing --> <param name="protection_trip_current_a" value="0"/> <!-- over-current hard limit (will stop the motor) after 100ms. Only applicable to ESCs with individual current sensing --> <param name="brake_to_stop" value="0"/> <!-- apply brake when stopping motor (or not) --> <param name="stall_timeout_ns" value="20000000"/> <!-- after spin-up, if no zero crossing is not detected for this amount of time, motor is considered stalled --> <param name="require_reset_if_stalled" value="0"/> <!-- require sending an array of zero commands to reset before next spin-up, if motor stalled --> <!--one beep--> <param name="tone_freqs" value="[200, 200,240, 200, 0,0,0,0, 0,0,0,0]"/> <!-- 200 is 2000Hz, max 255 --> <param name="tone_durations" value="[20, 0, 20, 0, 0,0,0,0, 0,0,0,0]"/> <!-- duration of each tone in units of 10 milli-seconds. Poor naming!!! --> <param name="tone_powers" value="[50, 0, 50, 0, 0,0,0,0, 0,0,0,0]"/> <!-- max is 255 --> <param name="dt_threshold_ns" value="150000"/> <!-- during start up, ignore inter-commutation times less than this val, probably noise --> <param name="max_dt_ns" value="2500000"/> <!-- min and max values for time between two commutations. these are used as caps --> <param name="min_dt_ns" value="50000"/> <param name="dt_bootstrap_ns" value="2000000"/> <!-- filter bootstrap value for commutation dt during start up --> <param name="spinup_stall_dt_ns" value="6000000"/> <!-- during spin-up, if no zero crossing is not detected for this amount of time, motor is considered stalled --> <param name="spinup_stall_check_ns" value="30000000"/> <!-- time after beginning of spinup to start checking for spinup stall --> <param name="alignment_time_ns" value="0"/> <!-- alignment time before spin-up. not really needed --> <param name="timing_advance" value="68"/> <!-- positive value -> earlier commutation. helps avoid de-syncs if demag time is long. default: 60. absolute maximum is 90 --> <param name="sense_advance" value="15"/> <!-- positive value -> delayed zero crossing sensing. default: 20. absolute maximum is 45 (not recommended above 20)--> <param name="demag_timing" value="1"/> <!-- zero crossing timing tweak. default: 0. set to 1 for low kV (< 500kV) motors to reduce chance of de-sync. do not set to 1 if RPM can exceed 100K eRPM --> </TuneParams> </EscParameters>Would you be able to provide guidance on next tuning step?
During the power step tests, the motor does not de-sync
Thanks!
Shawn -
-
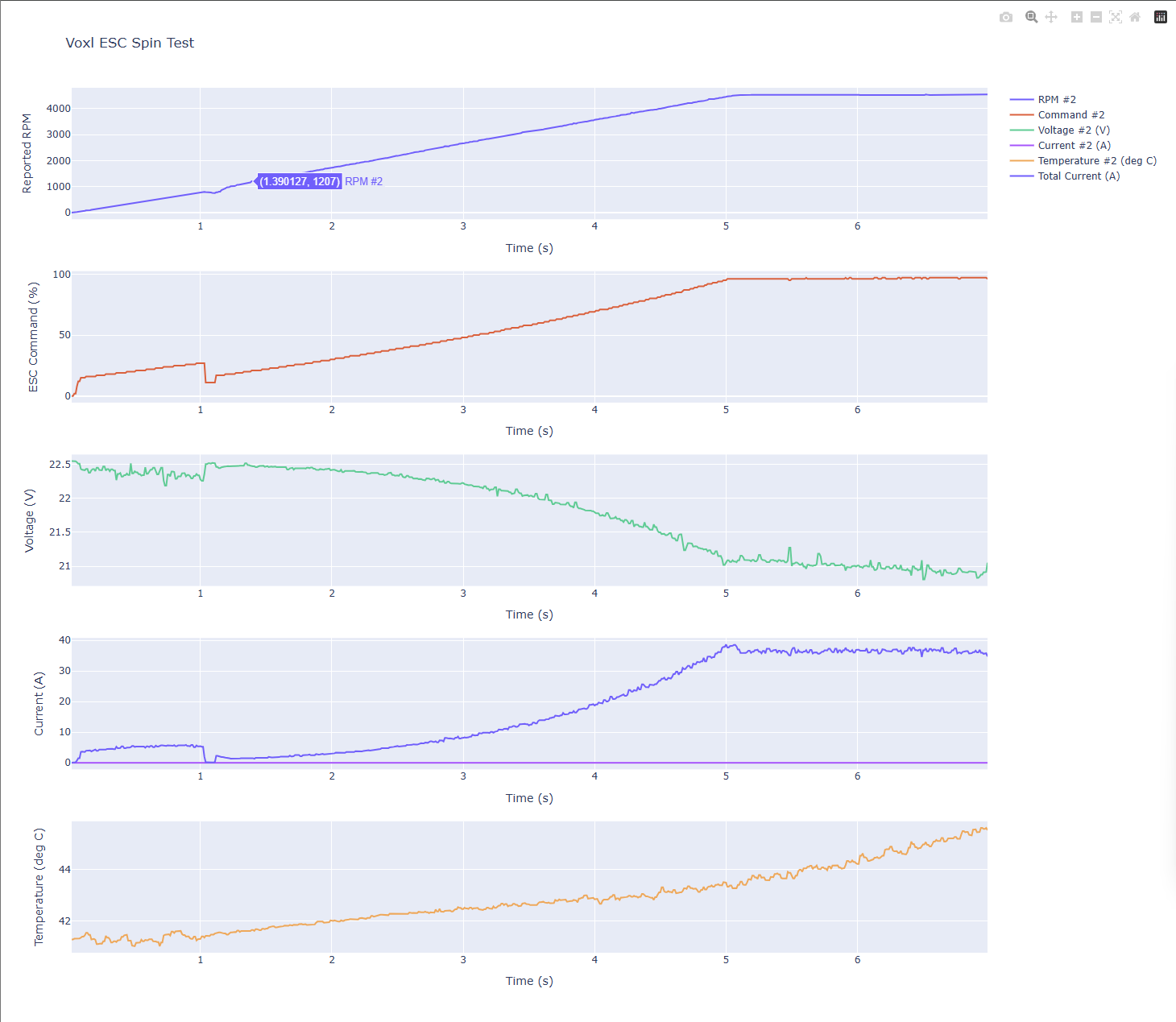
I raised the cmd-rate to 800 and noticed that curve sort of smooths out because the sample rate increased, which indirectly effects the plot granularity.

At this point, the graph resembles that of the reference graph in documentation. Would you agree with this or recommend further tuning?
Thanks!
Shawn -
@shawn_ricardo , just to close the loop on the original issue.. the delay in the calibration procedure was caused by UART data or processing of the ESC feedback backing up. The fix is to just slow down the command rate, seen in this commit : https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/commit/b512f9e3d5e695868775de3d40eedb2ad15cf6d9 . Additionally, using command line argument
--cmd-rate 100when you run the calibration script on VOXL2 will fix the issue.Regarding the issue in the step response where the feedback data appears not smooth, i believe it is related to FTID's buffer / delay. FTDI adapters have this parameter
latency_timerwhich is 16ms by default, which amount of time the FTDI board holds the RX'ed data before passing forwarding it to the PC (and vice versa, i believe). You can set that value to 1:You can check this value:
cat /sys/bus/usb-serial/devices/ttyUSB0/latency_timerAnd set it:
sudo su echo 1 > /sys/bus/usb-serial/devices/ttyUSB0/latency_timerYou would need to do this every time you unplug / plug the FTDI device back in.
(note that this applies only to Linux PC, not VOXL2).
Besides this, i think the plots look good. It looks like you have set the kp pretty low, which keeps the response softer (less chance of de-sync).
Alex