Camera reports quality of 99 but altitude is incorrect vs baro (using ArduPilot-4.7)
-
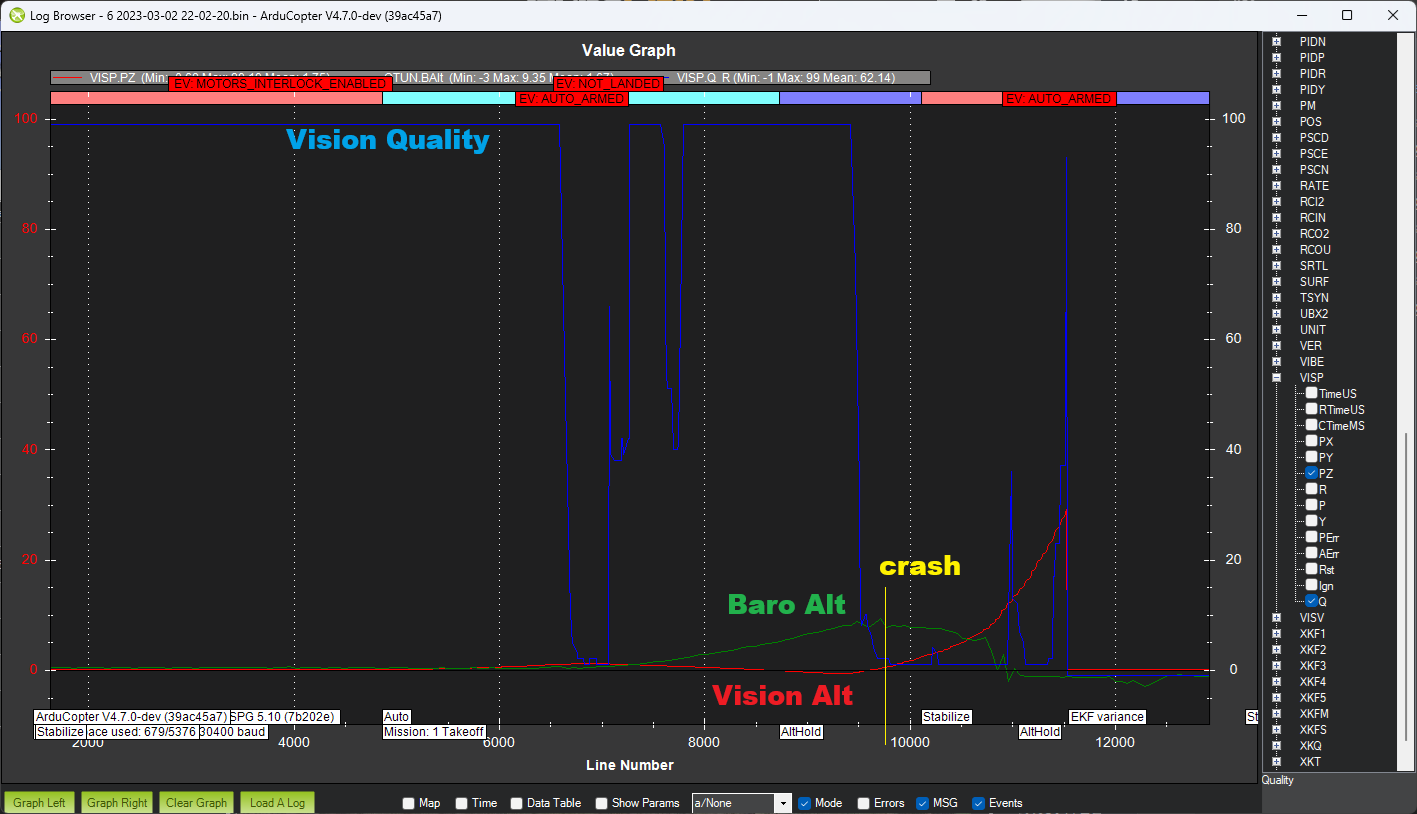
I'm one of the core developers of ArduPilot and I recently setup a Starling2 Max according to the ArduPilot VOXL2 setup instructions but during the first flight tests we found that the altitude provided by the VOXL2 was sometimes very inaccurate compared to the barometer especially during takeoff. What's actually more concerning is that the camera reported a quality of 99 during this period meaning that the AP EKF accepted the altitudes (and fused them) leading to very poor altitude estimate and the vehicle ended up flying too high and sadly in one test crashed into the ceiling of the gymnasium.
Below is a screenshot from the attached log showing the VOXL2 altitude in red and we can see it strangely goes down during the takeoff. The baro is shown in green and matches what the pilot observed. The blue line shows the VOXL2 reported quality.
I wonder if anyone has any suggestions or advice on how to improve the camera's altitude estimate? I think I saw a setting somewhere that controlled whether the forward or downward facing camera is used during takeoff.
Also any ideas about the incorrect quality reading?
In case it is of any use, here is the ArduPilot onboard log https://www.dropbox.com/scl/fi/8436ik5zw2zanboxbby84/drone-japan-starling2max-test-may2025.bin?rlkey=p6gdb1x0n4t06vh9grdib6lem&dl=0
-
@Randy-Mackay Do you know which version of the VOXL SDK is being used? We have recently transitioned over from voxl-qvio-server to voxl-openvins-server for VIO. OpenVINS is open source, so we have been investing our time there. Qvio is closed source and we can't really update the internals.