Starling fan attachment and optimization
-
Hi I have been running a profiling test of the code developed offline on starling with the processes like voxl_mpa_to_ros, voxl_tflite_server and a couple of other custom built ros nodes, I have found that the CPU overheats and I want to install fans on the voxl2 board, is there a guide for that and how to install and power the fans?
Also is the CPU overheating concerning for the lifetime of the CPU?
Name Freq (MHz) Temp (C) Util (%) ----------------------------------- cpu0 1804.8 94.6 77.50 cpu1 1804.8 94.6 70.54 cpu2 1804.8 93.4 71.08 cpu3 1804.8 93.4 68.16 cpu4 1670.4 91.5 17.82 cpu5 1670.4 95.0 44.33 cpu6 1670.4 92.7 22.84 cpu7 844.8 93.8 9.61 Total 95.0 47.73 10s avg 43.86 ----------------------------------- GPU 587.0 95.0 42.38 GPU 10s avg 44.45 ----------------------------------- memory temp: 93.4 C memory used: 3004/7671 MB ----------------------------------- Flags CPU freq scaling mode: auto Standby Not Active CPU OVERHEAT WARNING ----------------------------------- ^C received SIGINT Ctrl-C closing -
Hi I have been running a profiling test of the code developed offline on starling with the processes like voxl_mpa_to_ros, voxl_tflite_server and a couple of other custom built ros nodes, I have found that the CPU overheats and I want to install fans on the voxl2 board, is there a guide for that and how to install and power the fans?
Also is the CPU overheating concerning for the lifetime of the CPU?
Name Freq (MHz) Temp (C) Util (%) ----------------------------------- cpu0 1804.8 94.6 77.50 cpu1 1804.8 94.6 70.54 cpu2 1804.8 93.4 71.08 cpu3 1804.8 93.4 68.16 cpu4 1670.4 91.5 17.82 cpu5 1670.4 95.0 44.33 cpu6 1670.4 92.7 22.84 cpu7 844.8 93.8 9.61 Total 95.0 47.73 10s avg 43.86 ----------------------------------- GPU 587.0 95.0 42.38 GPU 10s avg 44.45 ----------------------------------- memory temp: 93.4 C memory used: 3004/7671 MB ----------------------------------- Flags CPU freq scaling mode: auto Standby Not Active CPU OVERHEAT WARNING ----------------------------------- ^C received SIGINT Ctrl-C closing@Darshit-Desai Do you see it getting too hot when it is flying or just when it is sitting on the ground?
-
@Darshit-Desai Do you see it getting too hot when it is flying or just when it is sitting on the ground?
@Eric-Katzfey This happens when I am testing it on the desktop (not flying). But I guess more processes like flying and moving around the drone would only increase the CPU load
-
@Eric-Katzfey This happens when I am testing it on the desktop (not flying). But I guess more processes like flying and moving around the drone would only increase the CPU load
When the drone is flying, there should be plenty of air flow to cool down the board, however it does depend on the overall system load, of course. Your CPU and GPU are both loaded to about 45% each, which is not too much, but without any cooling at all, can certainly reach high temperatures. The CPU will throttle itself (above 95C) to avoid damage, but it is definitely not great to run the board so hot for extended periods of time and many cycles.
The simplest thing you can do, if you want to avoid modifying the vehicle, is use a small desktop fan that will blow air onto the board while you are testing in non-flying state.
Mounting the fan on the vehicle would require modifications of the frame component design.
Alex
-
When the drone is flying, there should be plenty of air flow to cool down the board, however it does depend on the overall system load, of course. Your CPU and GPU are both loaded to about 45% each, which is not too much, but without any cooling at all, can certainly reach high temperatures. The CPU will throttle itself (above 95C) to avoid damage, but it is definitely not great to run the board so hot for extended periods of time and many cycles.
The simplest thing you can do, if you want to avoid modifying the vehicle, is use a small desktop fan that will blow air onto the board while you are testing in non-flying state.
Mounting the fan on the vehicle would require modifications of the frame component design.
Alex
@Alex-Kushleyev Ok thanks I will try out the desktop cooling fan recommendation, and I did see a significant throttling in performance where my own algorithm which worked fine on my PC wasn't even able to do a simple O(1) lookup.
But about the mounting of the fan, let's assume I can design some temporary 3d printed mount for the fan, may I know how to electrically connect to / solder to a power source like a power module / GPIO of the voxl2?
-
@Alex-Kushleyev Ok thanks I will try out the desktop cooling fan recommendation, and I did see a significant throttling in performance where my own algorithm which worked fine on my PC wasn't even able to do a simple O(1) lookup.
But about the mounting of the fan, let's assume I can design some temporary 3d printed mount for the fan, may I know how to electrically connect to / solder to a power source like a power module / GPIO of the voxl2?
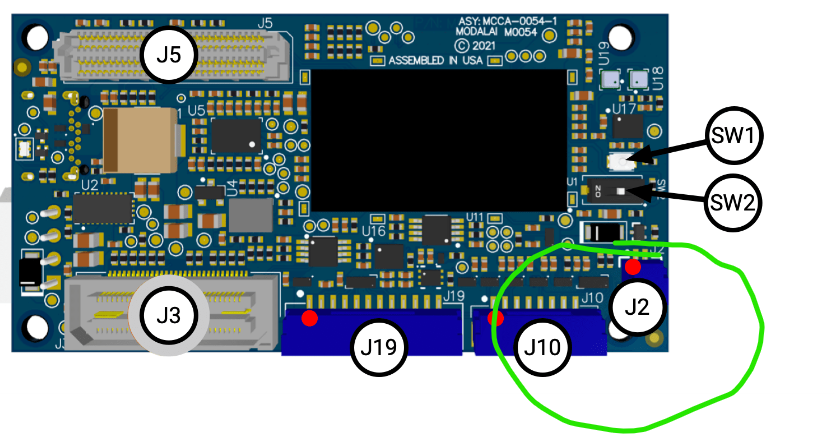
@Darshit-Desai VOXL2 has a fan connector on both VOXL2 and VOXL2 mini:
https://docs.modalai.com/voxl2-connectors/#j2---5vdc-fan-control
https://docs.modalai.com/voxl2-mini-connectors/#j2---5vdc-fan-controlWe also sell a cooling fan that works with VOXL1/2 : https://www.modalai.com/products/voxl-cooling-fan . on VOXL2, the fan output is always on and we (currently) do not have a way to control it.
-
@Darshit-Desai VOXL2 has a fan connector on both VOXL2 and VOXL2 mini:
https://docs.modalai.com/voxl2-connectors/#j2---5vdc-fan-control
https://docs.modalai.com/voxl2-mini-connectors/#j2---5vdc-fan-controlWe also sell a cooling fan that works with VOXL1/2 : https://www.modalai.com/products/voxl-cooling-fan . on VOXL2, the fan output is always on and we (currently) do not have a way to control it.
@Alex-Kushleyev We have the MODAL AI PCB fans in our inventory already, I see that on starling right where the fan connetor is present for the voxl2 board there is screw hole through which a allen head bolt goes in, this is kind of a bad design because even if I use a flat head screw it would still obstruct the connector.
Also for the desktop testing I am using a 12 V 0.5 Amp fan, would that emulate a similar amount of airflow as it would be in flight when the thrust motors rotate, (Considering I don't use any cooling on PCB). The fan diameter is around 120 mm and is the same size as the ones which are present in desktop CPUs
-
@Alex-Kushleyev We have the MODAL AI PCB fans in our inventory already, I see that on starling right where the fan connetor is present for the voxl2 board there is screw hole through which a allen head bolt goes in, this is kind of a bad design because even if I use a flat head screw it would still obstruct the connector.
Also for the desktop testing I am using a 12 V 0.5 Amp fan, would that emulate a similar amount of airflow as it would be in flight when the thrust motors rotate, (Considering I don't use any cooling on PCB). The fan diameter is around 120 mm and is the same size as the ones which are present in desktop CPUs
@Darshit-Desai , I agree, the J2 location is not ideal..
Regarding the external fan, you should try it out and see what works for you on the bench test. In flight we don't use a fan because the board typically does not overheat, but it is hard to say how much airflow is coming from the propellers.
-
@Darshit-Desai , I agree, the J2 location is not ideal..
Regarding the external fan, you should try it out and see what works for you on the bench test. In flight we don't use a fan because the board typically does not overheat, but it is hard to say how much airflow is coming from the propellers.
@Alex-Kushleyev Sure I will try it out, but given the size of the external fan I want to simulate the exact run of the drone with the airflow to check if it's able to handle the load or do I need to do more optimization (like modify voxl_mpa_to_ros service or remove other services)
-
@Alex-Kushleyev Sure I will try it out, but given the size of the external fan I want to simulate the exact run of the drone with the airflow to check if it's able to handle the load or do I need to do more optimization (like modify voxl_mpa_to_ros service or remove other services)
@Darshit-Desai , i would say it is not possible to simulate the exact airflow from the drone with an external fan, so my suggestion is set up an external fan for any bench-top development you need to do (to avoid overheating while not flying) and as soon as you are ready to test things out, just test fly. Keep in mind that you can do a manual flight (thrust + attitude) while your CPU / GPU is loaded up with processing as needed. Don't wait too long before you test in flight.
-
@Darshit-Desai , i would say it is not possible to simulate the exact airflow from the drone with an external fan, so my suggestion is set up an external fan for any bench-top development you need to do (to avoid overheating while not flying) and as soon as you are ready to test things out, just test fly. Keep in mind that you can do a manual flight (thrust + attitude) while your CPU / GPU is loaded up with processing as needed. Don't wait too long before you test in flight.
Also, it is very typical for software on drones to operate in "idle" mode while not flying to avoid overheating due to cpu load and lack of air flow from propellers. There is usually no need to run the full processing stack at max power while the drone is just sitting on the ground. And if you need to test on bench while not flying (during development), just use external fan.
-
Also, it is very typical for software on drones to operate in "idle" mode while not flying to avoid overheating due to cpu load and lack of air flow from propellers. There is usually no need to run the full processing stack at max power while the drone is just sitting on the ground. And if you need to test on bench while not flying (during development), just use external fan.
@Alex-Kushleyev Ok I have tested it with a desktopfan it does make a dent in the rise in temperature, I still want to install the Voxl Fan on the drone before flying, I saw the drawings the hole near the J2 connector has 33.5 mm diameter. Is it safe to remove that bolt to install a flat head bolt and what size should it be in inches/mm?
-
@Alex-Kushleyev Ok I have tested it with a desktopfan it does make a dent in the rise in temperature, I still want to install the Voxl Fan on the drone before flying, I saw the drawings the hole near the J2 connector has 33.5 mm diameter. Is it safe to remove that bolt to install a flat head bolt and what size should it be in inches/mm?
@Darshit-Desai , do you mean the hole has 3.5mm (not 33.5 mm)?
i will check if we have a recommended screw for this.
-
@Darshit-Desai , do you mean the hole has 3.5mm (not 33.5 mm)?
i will check if we have a recommended screw for this.
The guidance regarding the fan connector J2 being close to the mounting hole on VOXL2 is the following:
we recommend plugging the fan connector into J2 prior to inserting the mounting screw into the VOXL2 mounting hole. After the fan has been connected to J2, the fan wire can be carefully manipulated around the mounting screw during the screw installation to avoid pinching of the wire. The thickness of the fan wire permits a tight bend. Please try it out!
-
The guidance regarding the fan connector J2 being close to the mounting hole on VOXL2 is the following:
we recommend plugging the fan connector into J2 prior to inserting the mounting screw into the VOXL2 mounting hole. After the fan has been connected to J2, the fan wire can be carefully manipulated around the mounting screw during the screw installation to avoid pinching of the wire. The thickness of the fan wire permits a tight bend. Please try it out!
@Alex-Kushleyev That worked after some effort,(almost broke the connector)
I seem to now have a good grasp because with the fan and the flight propellers running the temperatures seem to still reach 75 deg C and there is also throttling happening at some 100-500 millisecond differences, the only other way seems to be to cannibalise mpa-to-ros package and profile my own code
-
@Alex-Kushleyev That worked after some effort,(almost broke the connector)
I seem to now have a good grasp because with the fan and the flight propellers running the temperatures seem to still reach 75 deg C and there is also throttling happening at some 100-500 millisecond differences, the only other way seems to be to cannibalise mpa-to-ros package and profile my own code
@Darshit-Desai 75C is normal, the CPU will not start throttling itself until about 95C.
If you look at output of
voxl-inspect-cpu, it will tell you what frequency each core is running at. If you set the cpu into performance mode usingvoxl-set-cpu-mode perf, all cores will be fixed to max frequency and will stay at max unless the temperature is too high (above 95C) and the thermal management will kick in.If CPU is in auto mode, the core frequencies will jump up and down depending on the required load.
-
@Darshit-Desai 75C is normal, the CPU will not start throttling itself until about 95C.
If you look at output of
voxl-inspect-cpu, it will tell you what frequency each core is running at. If you set the cpu into performance mode usingvoxl-set-cpu-mode perf, all cores will be fixed to max frequency and will stay at max unless the temperature is too high (above 95C) and the thermal management will kick in.If CPU is in auto mode, the core frequencies will jump up and down depending on the required load.
@Alex-Kushleyev Yes I have been checking using that command. The fact is that the moment the core temperatures hit more then 75C the position mode starts to turn off automatically showing it isn't ready to fly even when the starling is in flight, this also gives the rest of the algorithm a throttling effect like the ros messages which are delivered to the algorithm are slower
-
@Darshit-Desai 75C is normal, the CPU will not start throttling itself until about 95C.
If you look at output of
voxl-inspect-cpu, it will tell you what frequency each core is running at. If you set the cpu into performance mode usingvoxl-set-cpu-mode perf, all cores will be fixed to max frequency and will stay at max unless the temperature is too high (above 95C) and the thermal management will kick in.If CPU is in auto mode, the core frequencies will jump up and down depending on the required load.
@Alex-Kushleyev Here are some screenshots of the QGC, CPU Monitor and my code running in parallel in the terminal,
The following services were running:
1)Modified MPAtoROS launch node, with topics like /tof_pc, /voa_pc and /tflite_data only being published
2)Tflite server
3)Couple of ros nodes which use the data from above services to find the position of objects in the environmentFirst photo when my code starts up and the cpu core temperature is low:
https://drive.google.com/file/d/1AS1crU9FcIAUmhwG3nD1MG9CElVbwTiu/view?usp=sharingSecond screenshot is when the core temperature crosses >70 deg C, note how the position mode turns to red showing not ready
https://drive.google.com/file/d/1fzKAZKkbLDWjiuCCvKxyHo7UnE8GWeNK/view?usp=sharingThird screenshot: Here I found a peculiar warning which was not being sent to QGC in the voxl portal where it showed high accelerometer bias warning? Could that be the cause, can higher CPU core temperature cause that?
https://drive.google.com/file/d/1E8s7nQja1ijlcgFzkGI80TtRCWk703D7/view?usp=sharingThis led me to believe that my fan placement might be wrong so I am putting a photo of my starling drone with the fan placement, Is it correct or am I facing some other issues?
Here are the photos of the fan on the starling drone:
https://drive.google.com/file/d/1ApMiFDQItF9ZbxI8yD-_GXnhKaqCu3yo/view?usp=sharing,
https://drive.google.com/file/d/1Axz_itT0f9L1AVpDvHCaoIwfVr3JRWFt/view?usp=sharing,
https://drive.google.com/file/d/1B0UbtqbfJIjkOFo1PaPIW3eRHECIo5d1/view?usp=sharing,
https://drive.google.com/file/d/1B141Pc6Q6DCoFynJykV3PbuiFIsjCvco/view?usp=sharing -
@Alex-Kushleyev Here are some screenshots of the QGC, CPU Monitor and my code running in parallel in the terminal,
The following services were running:
1)Modified MPAtoROS launch node, with topics like /tof_pc, /voa_pc and /tflite_data only being published
2)Tflite server
3)Couple of ros nodes which use the data from above services to find the position of objects in the environmentFirst photo when my code starts up and the cpu core temperature is low:
https://drive.google.com/file/d/1AS1crU9FcIAUmhwG3nD1MG9CElVbwTiu/view?usp=sharingSecond screenshot is when the core temperature crosses >70 deg C, note how the position mode turns to red showing not ready
https://drive.google.com/file/d/1fzKAZKkbLDWjiuCCvKxyHo7UnE8GWeNK/view?usp=sharingThird screenshot: Here I found a peculiar warning which was not being sent to QGC in the voxl portal where it showed high accelerometer bias warning? Could that be the cause, can higher CPU core temperature cause that?
https://drive.google.com/file/d/1E8s7nQja1ijlcgFzkGI80TtRCWk703D7/view?usp=sharingThis led me to believe that my fan placement might be wrong so I am putting a photo of my starling drone with the fan placement, Is it correct or am I facing some other issues?
Here are the photos of the fan on the starling drone:
https://drive.google.com/file/d/1ApMiFDQItF9ZbxI8yD-_GXnhKaqCu3yo/view?usp=sharing,
https://drive.google.com/file/d/1Axz_itT0f9L1AVpDvHCaoIwfVr3JRWFt/view?usp=sharing,
https://drive.google.com/file/d/1B0UbtqbfJIjkOFo1PaPIW3eRHECIo5d1/view?usp=sharing,
https://drive.google.com/file/d/1B141Pc6Q6DCoFynJykV3PbuiFIsjCvco/view?usp=sharingPlease avoid mounting the cpu fan in a way that adds stress to the board. In your particular case, it seems the fan is wedged between the wifi dongle and the actual CPU, which will actually put pressure and can bend the board. IMU is very sensitive to stresses inside the PCB and slight bending can affect the IMU bias. Additionally, direct contact of the fan to the VOXL2 PCB can add some small vibrations (which can potentially throw off any detector in PX4 that is looking for a perfectly still IMU for initialization).
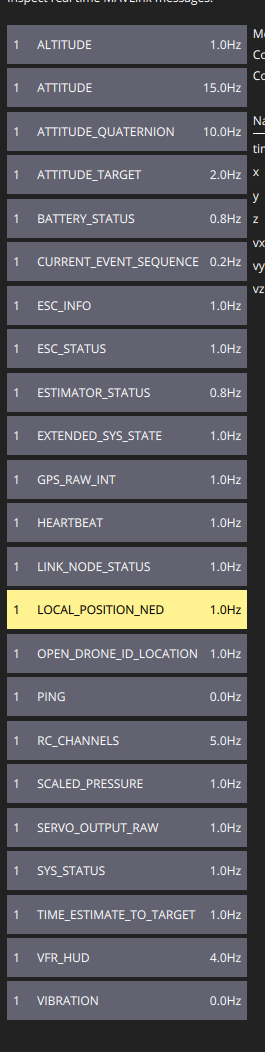
To confirm the IMU bias issue, you can inspect the IMU data using QGC (mavlink inspector) and see if the XYZ accelerometer (while sitting still) changes significantly as the board warms up. Then you can remove the wedged fan (and hold it close to the board) and test again and see if the unusual accel bias is gone (when warmed up).
My strong recommendation is to remove the fan from its current location. You may want to design + 3D print an plastic mount, perhaps integrated with the GPS mount, but also having extra attachment points so that it does not oscillate / vibrate due to being cantilevered. If you want to go that route, i can see if we can share the GPS mount CAD file with you.
Alex
-
Please avoid mounting the cpu fan in a way that adds stress to the board. In your particular case, it seems the fan is wedged between the wifi dongle and the actual CPU, which will actually put pressure and can bend the board. IMU is very sensitive to stresses inside the PCB and slight bending can affect the IMU bias. Additionally, direct contact of the fan to the VOXL2 PCB can add some small vibrations (which can potentially throw off any detector in PX4 that is looking for a perfectly still IMU for initialization).
To confirm the IMU bias issue, you can inspect the IMU data using QGC (mavlink inspector) and see if the XYZ accelerometer (while sitting still) changes significantly as the board warms up. Then you can remove the wedged fan (and hold it close to the board) and test again and see if the unusual accel bias is gone (when warmed up).
My strong recommendation is to remove the fan from its current location. You may want to design + 3D print an plastic mount, perhaps integrated with the GPS mount, but also having extra attachment points so that it does not oscillate / vibrate due to being cantilevered. If you want to go that route, i can see if we can share the GPS mount CAD file with you.
Alex
@Alex-Kushleyev said in Starling fan attachment and optimization:
To confirm the IMU bias issue, you can inspect the IMU data using QGC (mavlink inspector) and see if the XYZ accelerometer (while sitting still)
Which parameter would it be? Position NED?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login