Issue with ros-melodic-cv-bridge and voxl-vision-hub conflict on VOXL2
-
Hello,
I am currently working in a VOXL2 board (Ubuntu 18.04 environment with ROS Melodic). I have been attempting to install ros-melodic-cv-bridge
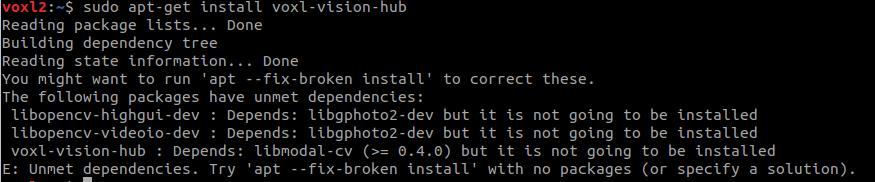
sudo apt install ros-melodic-cv-bridge. However, I've encountered a problem where installing cv-bridge leads to the removal of voxl-vision-hub, rendering my camera unusable. Conversely, installing voxl-vision-hub results in the inability to use cv-bridge.I was wondering if anyone has encountered a similar issue or has any suggestions for resolving this conflict between ros-melodic-cv-bridge and voxl-vision-hub. Any guidance or solution would be greatly appreciated.
Thank you!
-
Hello,
I am currently working in a VOXL2 board (Ubuntu 18.04 environment with ROS Melodic). I have been attempting to install ros-melodic-cv-bridge
sudo apt install ros-melodic-cv-bridge. However, I've encountered a problem where installing cv-bridge leads to the removal of voxl-vision-hub, rendering my camera unusable. Conversely, installing voxl-vision-hub results in the inability to use cv-bridge.I was wondering if anyone has encountered a similar issue or has any suggestions for resolving this conflict between ros-melodic-cv-bridge and voxl-vision-hub. Any guidance or solution would be greatly appreciated.
Thank you!
-
Hi @dlee - this is purposeful. The voxl2 uses a ton of dependencies on a specific build of opencv - so by installing ros-melodic-cv-bridge (which you should NOT even be able to do due to dependency conflicts) you break a lot of what is dependent on that build of opencv, including vision-hub. The ros melodic which is on target is the minimal build, meaning opencv isnt installed due to those specific conflicts above.
You can always try installing it from source and pointing the third party instead of downloading it in sudo. My other recommendation would be to upgrade to ros2 foxy which is already on target.
https://github.com/ros-perception/vision_opencv/tree/melodic <-- here is the link to to melodic cv bridge. LMK if that helps!
-
The other option as well is to use a docker image running ros melodic and cv bridge already on it so you do not get conflicts with what is on target!
-
Hi @dlee - this is purposeful. The voxl2 uses a ton of dependencies on a specific build of opencv - so by installing ros-melodic-cv-bridge (which you should NOT even be able to do due to dependency conflicts) you break a lot of what is dependent on that build of opencv, including vision-hub. The ros melodic which is on target is the minimal build, meaning opencv isnt installed due to those specific conflicts above.
You can always try installing it from source and pointing the third party instead of downloading it in sudo. My other recommendation would be to upgrade to ros2 foxy which is already on target.
https://github.com/ros-perception/vision_opencv/tree/melodic <-- here is the link to to melodic cv bridge. LMK if that helps!
-
Hi i've faced the same issue! Was wondering where voxl-vision-hub went ^^
How can we get it back on the system? @Zachary-Lowell-0
-
Hi @dlee and @smilon so if you are installing your vision_opencv into sudo, then the conflicts will wipe out a ton of MPA and SDK programs. This is highly recommended NOT to be done. Instead either use docker, or leverage the package as a third party in a virtual environment or something along that nature.
voxl-vision-hub should be on target from the SDK installation:
voxl2:/$ sudo apt-get install voxl-vision-hub Reading package lists... Done Building dependency tree Reading state information... Done voxl-vision-hub is already the newest version (1.7.3). voxl-vision-hub set to manually installed. 0 upgraded, 0 newly installed, 0 to remove and 37 not upgraded. 1 not fully installed or removed. After this operation, 0 B of additional disk space will be used.However, most likely had the deb wiped or reconfigured when installing the opencv you were trying to leverage. Provided you guys are on sdk 1.1.2, you can just go into the tarball that has since been untarred and adb push the voxl-suite/voxl-vision-hub deb to the voxl2 and then do a
sudo dpkg -i voxl-vision-hubXXXDEB- that will install it back onto the system. The other option is to either reflash or do asudo apt-get upgradewhich would pull the most recent debs from the modalAI apt repository on the cloud.Let me know if this helps either of you!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login