@Prabhav-Gupta You can just remap the topics coming out of the voxl_mpa_node, or remap the topics inside your ORBSLAM launch file. No need to mess with the source code.
S
Best posts made by smilon
-
RE: Rename ROS Topics pulished by the RB5posted in ROS
Latest posts made by smilon
-
RE: [URGENT] RB5 VOXL2 doesn't recognize replaced hires cameraposted in Qualcomm Flight RB5 5G Drone
@Alex-Kushleyev Dear Alex,
It's the M0025-002 high resolution camera. Perhaps the connection sodder was loose and it popped off real easily. In hindsight, perhaps it's not worth anyone's time. If you can provide any repair tricks that'd be neat otherwise I'll probably have to send a new order in.
Best,
Milton
-
RE: [URGENT] RB5 VOXL2 doesn't recognize replaced hires cameraposted in Qualcomm Flight RB5 5G Drone
Ok so you were right. Think I just found the issue
")
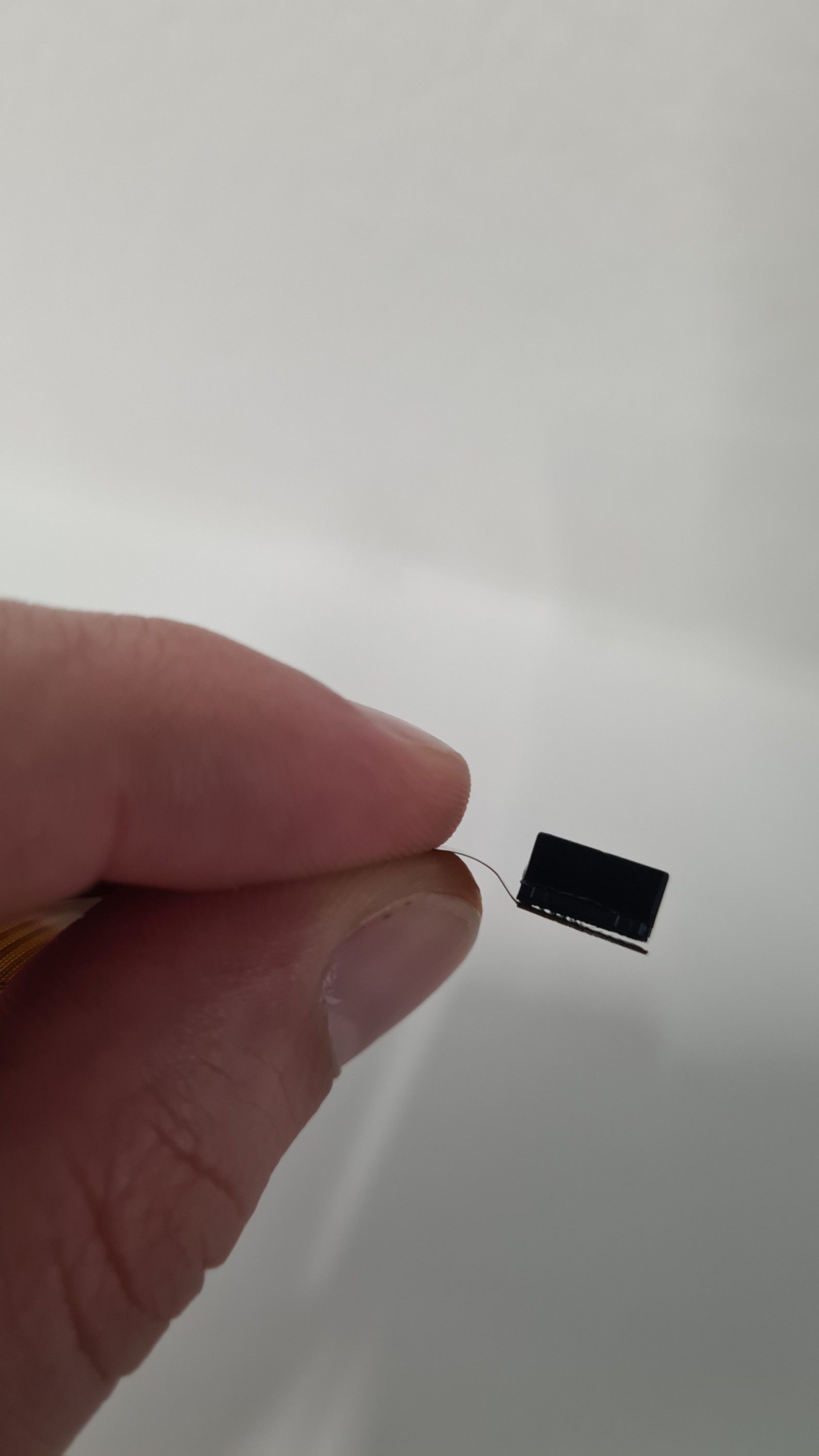
(the backplate of the sensor is detached)
I didn't notice that when we got it a few weeks ago. Can we send it back and you can send us over a new one? Or try to see if it can be repaired? Who can we talk to, its kind of time-sensitive.
Thanks a lot again,
Milton
-
RE: [URGENT] RB5 VOXL2 doesn't recognize replaced hires cameraposted in Qualcomm Flight RB5 5G Drone
@Alex-Kushleyev Dear Alex,
I ended up re-flashing SDK1.1.2 on the RB5 and now I don't get an "unrecognized error" on the hires camera, however I still haven't managed to get it to work. The problem now seems to be that it's not able to recognize several imx214 supported resolutions and therefore the hires camera doesn't start up. For example in the following voxl-camera-server.conf:
{ "type": "imx214", "name": "hires", "enabled": true, "camera_id": 3, "fps": 30, "en_preview": false, "preview_width": 640, "preview_height": 480, "en_raw_preview": false, "en_small_video": true, "small_video_width": 640, "small_video_height": 480, "small_venc_mode": "h265", "small_venc_br_ctrl": "cqp", "small_venc_Qfixed": 30, "small_venc_Qmin": 15, "small_venc_Qmax": 40, "small_venc_nPframes": 9, "small_venc_mbps": 2, "en_large_video": true, "large_video_width": 640, "large_video_height": 480, "large_venc_mode": "h265", "large_venc_br_ctrl": "cqp", "large_venc_Qfixed": 38, "large_venc_Qmin": 15, "large_venc_Qmax": 50, "large_venc_nPframes": 29, "large_venc_mbps": 30, "en_snapshot": true, "en_snapshot_width": 4208, "en_snapshot_height": 3120, "ae_mode": "isp" }I get the following status info from the voxl-camera-server:
Feb 10 13:48:55 m0052 voxl-camera-server[2929]: WARNING: Failed to start cam hires due to invalid resolution Feb 10 13:48:55 m0052 voxl-camera-server[2929]: WARNING: assuming cam is missing and trying to compensate Feb 10 13:48:55 m0052 voxl-camera-server[2929]: Starting Camera: stereo_rear (originally id #5) with id offset: 1 Feb 10 13:48:55 m0052 voxl-camera-server[2929]: Using gain limits min: 54 max: 3451 Feb 10 13:48:55 m0052 voxl-camera-server[2929]: WARNING: Camera stereo_front Received much newer master than child (33.2ms), discarding Feb 10 13:48:55 m0052 voxl-camera-server[2929]: setting ov7251 BLC register for cam id 4 Feb 10 13:48:55 m0052 voxl-camera-server[2929]: setting ov7251 BLC register for cam id 3 Feb 10 13:48:55 m0052 voxl-camera-server[2929]: ------ voxl-camera-server: Started 3 of 4 cameras Feb 10 13:48:55 m0052 voxl-camera-server[2929]: ------ voxl-camera-server: Camera server is now running Feb 10 13:48:55 m0052 voxl-camera-server[2929]: WARNING: Camera stereo_rear Received much newer child than master (33.3ms), discarding mI obviously tried with the Sentinel default config before modifying the resolutions to 640x480. I would appreciate if you provided a list of the supported resolutions for the M0025 sensor, just for my own sanity checks.
More info:
I am using voxl-camera-server 1.8.9+1. And to clarify with my previous post, no I haven't seen the hires cam working yet. Also a link to the shop for the replacement: https://www.modalai.com/products/msu-m0025-2?srsltid=AfmBOop_qPdLSNdkIYk-s1uaBYXFxWmQ77v__3fUlWISbT7HQM_sLcW0
-
RE: [URGENT] RB5 VOXL2 doesn't recognize replaced hires cameraposted in Qualcomm Flight RB5 5G Drone
systemctl status voxl-camera-server:
Feb 07 11:59:55 m0052 voxl-camera-server[1528]: setting ov7251 BLC register for cam id 1 Feb 07 11:59:55 m0052 voxl-camera-server[1528]: Starting Camera: tracking (id #2) Feb 07 11:59:55 m0052 voxl-camera-server[1528]: Using gain limits min: 54 max: 3451 Feb 07 11:59:55 m0052 voxl-camera-server[1528]: setting ov7251 BLC register for cam id 2 Feb 07 11:59:55 m0052 voxl-camera-server[1528]: Starting Camera: hires (id #3) Feb 07 11:59:55 m0052 voxl-camera-server[1528]: WARNING: cam hires (id 3) does not seem to be alive Feb 07 11:59:55 m0052 voxl-camera-server[1528]: ------ voxl-camera-server: Started 2 of 3 cameras Feb 07 11:59:55 m0052 voxl-camera-server[1528]: ------ voxl-camera-server: Camera server is now running Feb 07 11:59:55 m0052 voxl-camera-server[1528]: WARNING: Camera stereo Received much newer master than child (33.3ms), discarding child Feb 07 13:01:59 m0052 voxl-camera-server[1528]: WARNING: Camera stereo Received much newer child than master (33.8ms), discarding master lines 3-18/18 (END) -
[URGENT] RB5 VOXL2 doesn't recognize replaced hires cameraposted in Qualcomm Flight RB5 5G Drone
Dear ModalAI team,
I just had to replace my M0025 hires camera on my RB5. After replacing the new camera as instructed in one of your videos, I noticed first of all that the hires pipe is not recognized even though my voxl-camera-server.conf is untouched.
Even so, I have triple-checked the camera is undamaged and installed properly. I never had a similar issue before and just ordered the camera fresh (ordered last week). Also note, that when I briefly have connection I verified that all the rest cameras are streaming fine through voxl-streamer.
Please advise ASAP as it is a time-sensitive issue.
-
RE: Using wireguard on VOXL 2posted in VOXL 2
@achanana Btw we were able to use wireguard by building wireguard-go and running:
./wireguard-go wg0
sudo ip linkset wg0 up
sudo ip address add xx.xx.xx.xx/xx dev wg0
sudo wg setconf wg0 wg0.confThis way you can bypass the unsupported kernel version.
-
RE: Using wireguard on VOXL 2posted in VOXL 2
@Alex-Kushleyev Hello! Wanted to check if there any ETA updates on the new kernel version
-
RE: Height estimate not stable and wrong headingposted in Qualcomm Flight RB5 5G Drone
@tom Hi Tom! To be honest I was not even aware this tool existed... super handy! So I played with the different EKF2_helpers and while the "Height estimate not stable" error was solved, I have two problems with the outdoor profiles that my application requires:
- outdoor_gps_baro.params:
While the heading is correct in this profile, I get the error "local position estimate not valid". I checked that VIO is up and PX4 receives vehicle_odometry data. Therefore I cannot takeoff with this configuration. Additionally I get a warning that "GPS speed accuracy too low".
- vio_gps_baro.params:
I can takeoff with position mode but I get the same "GPS speed accuracy too low" warning which does not allow me to trigger any autonomous PX4 functionality, which is crucial for my application. Even with 14 satellite lock, seems strange. Additionally the drone heading remains to be the local heading from the VIO initialization orientation, instead of the correct global heading. Is this intended?
Any ideas on how to solve these problems? I am more interested in the vio_gps_baro.params profile. Could it be a hardware issue with the GPS?
Best,
Milton
-
Height estimate not stable and wrong headingposted in Qualcomm Flight RB5 5G Drone
I have a clean install of voxl-sdk-1.1.2 and I am getting an error of a "height estimate not stable" which does not allow me to switch to position mode, or any autonomous functionality. Even with a GPS lock and 12 satellite connections.
I additionally observe that my compass's North points to the north of the PX4's init LOCAL orientation instead of the GLOBAL north, from GPS.
I am able to reproduce that by just changing orientation of the drone and restarting voxl-px4 service, while visualizing on QGroundControl.
Maybe the two are related. Is there any way to configure orientation to be taken from GPS and not perhaps the VIO channel?
P.S. I can bypass the error and switch to position mode by first arming in manual mode and then switching, but still I can't e.g return to home. Position holds great though.