Can you power VOXL2 from the ModalAI 6s ESC?
-
can you try the ramp test
https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/blob/dev/voxl-esc-tools/doc/low_kv_motor_tuning.md?ref_type=heads#power-ramp-testand the step tests
https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/blob/dev/voxl-esc-tools/doc/low_kv_motor_tuning.md?ref_type=heads#power-step-testsi think the issue may be happening because you are punching a lot of power right after spin-up.
You can try increasing the following parameter to make sure the motor is fully spun up :
https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/blob/dev/voxl-esc-params/low_kv/mn4006_m0134_6_low_kv.xml?ref_type=heads#L77 increase to 500
I may need to add some protection against applying high power from very low rpm, as it is a really tough case
-
can you try the ramp test
https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/blob/dev/voxl-esc-tools/doc/low_kv_motor_tuning.md?ref_type=heads#power-ramp-testand the step tests
https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/blob/dev/voxl-esc-tools/doc/low_kv_motor_tuning.md?ref_type=heads#power-step-testsI was trying to avoid those tests before I had a proper setup to clamp the drone down, but I'll work on getting that together now and I'll give the ramp test a try.
Thanks!
-
I was trying to avoid those tests before I had a proper setup to clamp the drone down, but I'll work on getting that together now and I'll give the ramp test a try.
Thanks!
@Matthew-Wellner , yes.. safety first!
-
@Matthew-Wellner , yes.. safety first!
I tried your test on my set up (mn4006 380kv, 15" prop), i cannot reproduce the issue. Please make sure that the following params are set correctly:
<param name="timing_advance" value="60"/> <param name="sense_advance" value="20"/> <param name="demag_timing" value="1"/>If i set timing advance to something much lower, i can reproduce an issue, the motor makes a high pitch sound.
Also please check the spin-up params. you could increase the spin-up rpm target to make sure the motor spins a bit faster after spin-up.
Here is a plot of the following test (don't run at such high power until you make sure the lower power works fine
") :
:./voxl-esc-spin.py --id 3 --power 100 --timeout 1.5 --enable-plot 1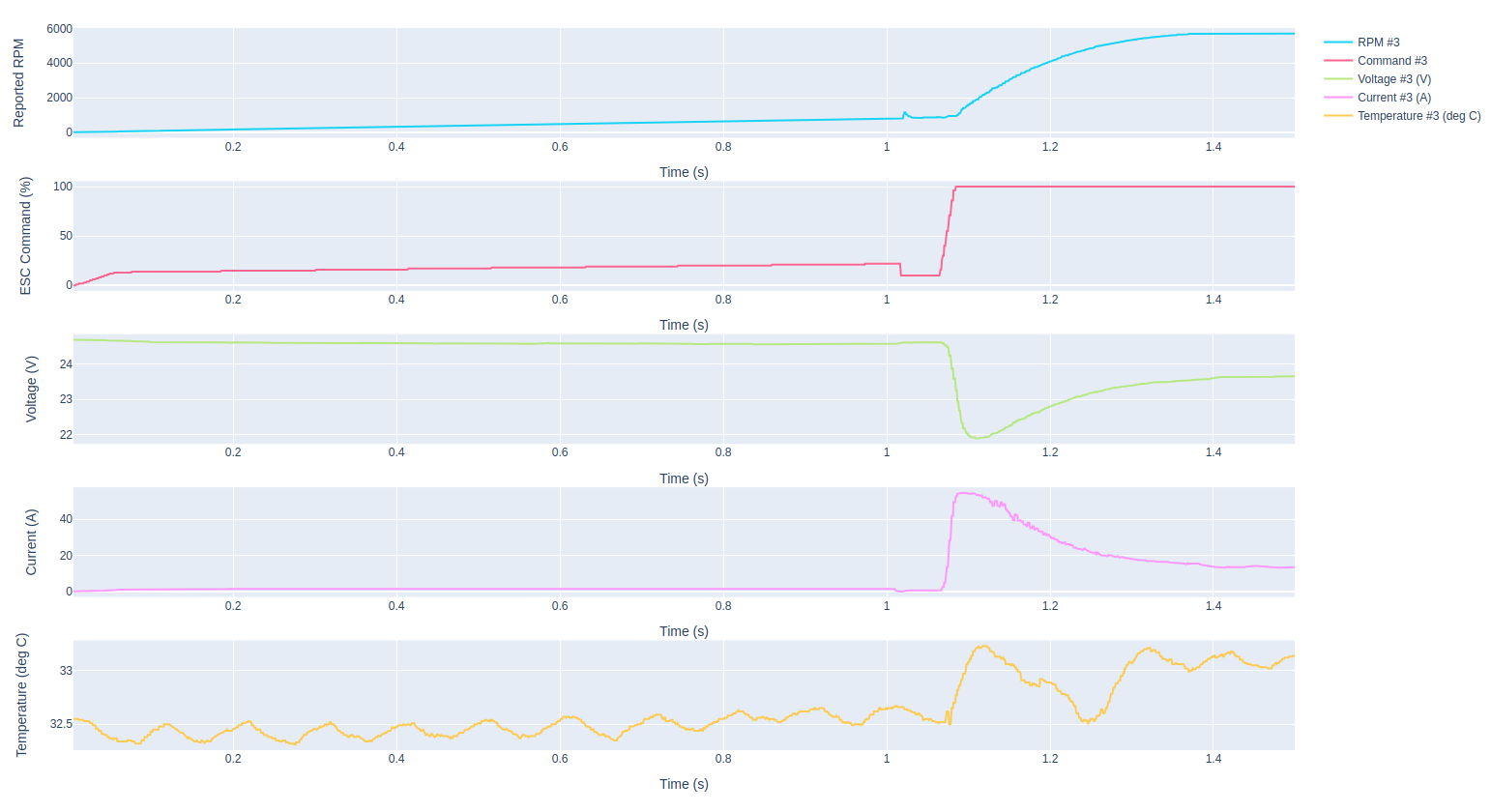
You can see three phases of the motor spin-up
- smooth sinusoidal spinup (t=0..1s)
- short transition to 6-step commutation control (t=1.0..1.05s)
- apply desired power with a slight slew rate limit (rate limit happens internally to firmware). Motor accelerates to maximum RPM. t=1.05.. 1.5s
-
I tried your test on my set up (mn4006 380kv, 15" prop), i cannot reproduce the issue. Please make sure that the following params are set correctly:
<param name="timing_advance" value="60"/> <param name="sense_advance" value="20"/> <param name="demag_timing" value="1"/>If i set timing advance to something much lower, i can reproduce an issue, the motor makes a high pitch sound.
Also please check the spin-up params. you could increase the spin-up rpm target to make sure the motor spins a bit faster after spin-up.
Here is a plot of the following test (don't run at such high power until you make sure the lower power works fine
:./voxl-esc-spin.py --id 3 --power 100 --timeout 1.5 --enable-plot 1You can see three phases of the motor spin-up
- smooth sinusoidal spinup (t=0..1s)
- short transition to 6-step commutation control (t=1.0..1.05s)
- apply desired power with a slight slew rate limit (rate limit happens internally to firmware). Motor accelerates to maximum RPM. t=1.05.. 1.5s
The ramp tests seems to have worked. I think that I was jumping the power up too quickly like you suggested. I'll get into trying to calibrate now. Thanks!!
-
can you try the ramp test
https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/blob/dev/voxl-esc-tools/doc/low_kv_motor_tuning.md?ref_type=heads#power-ramp-testand the step tests
https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/blob/dev/voxl-esc-tools/doc/low_kv_motor_tuning.md?ref_type=heads#power-step-tests@Alex-Kushleyev said in Can you power VOXL2 from the ModalAI 6s ESC?:
When I run the step tests, I can get up to the step amplitude of 70 successfully. When I try 20-100, it looks like I start to desync.
-
The ramp tests seems to have worked. I think that I was jumping the power up too quickly like you suggested. I'll get into trying to calibrate now. Thanks!!
One last question - How do I get new values for kp & ki, or do I just leave them at 0?
-
One last question - How do I get new values for kp & ki, or do I just leave them at 0?
@Matthew-Wellner , ok the results are not too bad. I will keep working on improving the low kv performance, but i think what you have should be sufficient.
You can also push the commutation advance a bit higher from 60 to 70 or 75, that should improve even more at an expense of a bit of motor efficiency.
You should be ready for the rpm controller, please run the calibration procedure. You can set kp=50, ki=10 to give it a little bit feedback.
Another thing that will prevent de-sync is the max_rpm_delta, which is basically the maximum RPM error that is used in the RPM controller. You can start by capping it about 2/3 of the max rpm and after calibration you can see if RPM step tests result in any de-syncs.
By the way, if you leave kp=0 and ki=0, the performance (speed of response) should be similar to a traditional ESC, but still better because of the Feed Forward curve and battery voltage compensation. So you can experiment with this and even kp=0 and ki=0 will still result in good performance. But a little better should be the defaults that i have here :https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/blob/dev/voxl-esc-params/low_kv/mn4006_m0134_6_low_kv.xml#L62 including
max_kpeandmax_kie(andmax_rpm_deltayou can adjust if you see any de-syncs during rpm step tests) -
@Matthew-Wellner , ok the results are not too bad. I will keep working on improving the low kv performance, but i think what you have should be sufficient.
You can also push the commutation advance a bit higher from 60 to 70 or 75, that should improve even more at an expense of a bit of motor efficiency.
You should be ready for the rpm controller, please run the calibration procedure. You can set kp=50, ki=10 to give it a little bit feedback.
Another thing that will prevent de-sync is the max_rpm_delta, which is basically the maximum RPM error that is used in the RPM controller. You can start by capping it about 2/3 of the max rpm and after calibration you can see if RPM step tests result in any de-syncs.
By the way, if you leave kp=0 and ki=0, the performance (speed of response) should be similar to a traditional ESC, but still better because of the Feed Forward curve and battery voltage compensation. So you can experiment with this and even kp=0 and ki=0 will still result in good performance. But a little better should be the defaults that i have here :https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/blob/dev/voxl-esc-params/low_kv/mn4006_m0134_6_low_kv.xml#L62 including
max_kpeandmax_kie(andmax_rpm_deltayou can adjust if you see any de-syncs during rpm step tests)Also, keep in mind that the step tests are extremely aggressive, you will never experience this in practice, as it is practically impossible to have a step input like as output of a flight controller. Nevertheless we want to make sure that the ESC will perform well. At the end of the day, since the flight controller will use RPM control, the RPM (step) tests are the most important - the RPM controller can help avoid these extreme transitions.
-
Also, keep in mind that the step tests are extremely aggressive, you will never experience this in practice, as it is practically impossible to have a step input like as output of a flight controller. Nevertheless we want to make sure that the ESC will perform well. At the end of the day, since the flight controller will use RPM control, the RPM (step) tests are the most important - the RPM controller can help avoid these extreme transitions.
@Matthew-Wellner , i have acquired SunnySky 4004 400kV motor, waiting for Tmotor MS1101 props, so i will be able to test your exact configuration and make sure it works well and does not desync. It will take a few more days for props to come in, just wanted to let you know.
-
@Matthew-Wellner , i have acquired SunnySky 4004 400kV motor, waiting for Tmotor MS1101 props, so i will be able to test your exact configuration and make sure it works well and does not desync. It will take a few more days for props to come in, just wanted to let you know.
@Alex-Kushleyev Awesome!! Thanks!
-
A Alex Kushleyev referenced this topic on


Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login