KDE 4012XF motors with 16 in props
-
Q: will the M0134-6 VOXL 4-in-1 ESC support KDE 4012XF motors with 16 in props?
Q: are there more specification details on what is supported in the 6S version?
-
Low-kV motors are currently not fully supported, as they may experience de-sync at high power. By "low kv", I mean kv < 600. This happens because low kv motors typically have high winding inductance, which results in long demagnetization time and loss of motor timing.
We are working on improving the firmware to handle this issue. An update will be coming within several weeks.
The demagnetization issue is not a function of the 6S version of our M0134 ESC, but it is a function of the motor itself. However, the low kv motors are often made to run on higher voltages (6S) so that is why the issue can be observed on the M0134-6 and not observed on 4s ESCs (since typical motors for 4S or less will have higher kV values)
Meanwhile, there is not much that can be done to improve the performance. Updating ESC param
sense_advancefrom0to20should help a little bit:<param name="sense_advance" value="20"/>When testing new motor / prop configurations, it is highly recommended to use
voxl-esctools and a step command can be very useful:./voxl-esc-spin-step.py --id 3 --power 30 --step-amplitude 50 --cmd-rate 1000 --timeout 2.0 --step-frequency 1.0 --enable-plot 1This command does the following:
- spins ESC ID 3 in power mode (not rpm mode)
- initial power is 30%
- at frequency of 1hz a step size of 50% of power will be applied (up 50% and then down 50%)
- the test will terminate after 2 seconds
- plot will be displayed after the test
It is good to use this kind of test because it simulates very abrupt change in ESC command (probably not realistic, but still, a properly tuned ESC should handle this properly). The test is short which should prevent permanent damage to the motor / ESC.
It is also good to start off with lower amplitude steps (10, 20, 30, 40, 50, etc) and work your way up, because if it fails at lower step size, there is less change of a electrical failure of the ESC / motor and there is no point to increase the step size, because it already failed at a lower value.
A sample output from the above test command is below:
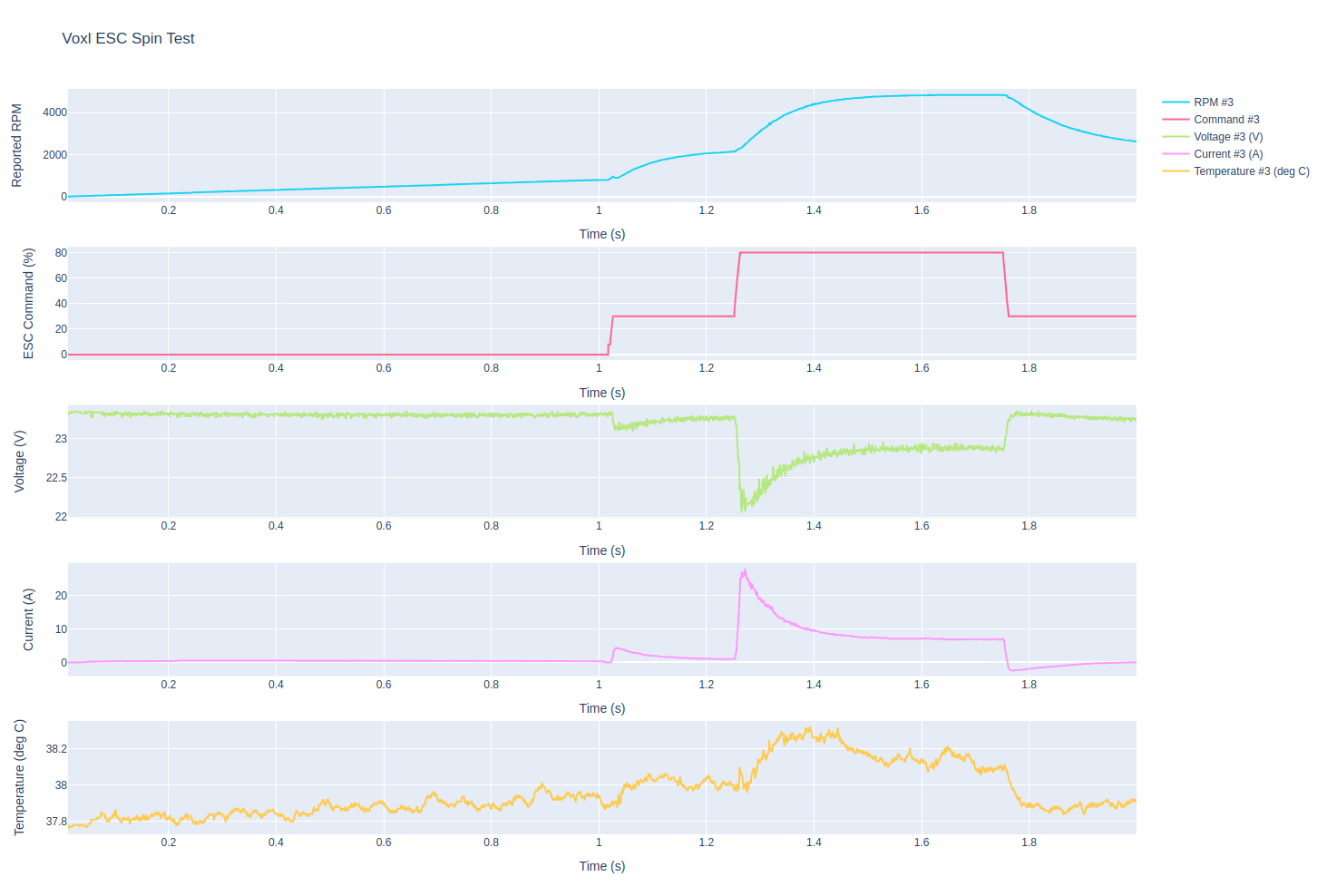
You can see initial smooth spin-up during the first 1 second (spin-up params can be changed in ESC params xml). Then the ESC kicks up the power to 30% and then to 80%. The steady state current at 80% power is about 7A but the current spike during transition reaches 28A.
-
@Alex-Kushleyev Any update on supporting "low KV" motors?
-
Hi, I just wanted to clarify something. To answer your question, yes, we have a solution for running low-kv motors. I will write up instructions how to test shortly.
However, the original post was asking about KDE 4012XF motor, assuming it would be connected to our M0134-6 ESC. The motor is too large to be used with this ESC, which will probably result in ESC overheating.
However, we are getting ready to release a new ESC that should handle bigger motors and the low-kv fix will also work on these ESC. Please see some initial details about the ESC here: https://forum.modalai.com/topic/2979/can-you-power-voxl2-from-the-modalai-6s-esc/11
My goal is to provide instructions how to test the particular ESC + motor + propeller using
voxl-esctools and see if it is working properly be able to tell if the ESC is adequate for your application or not, so you can choose between M0134-6 or the M0138-1 (latter being the new, more powerful ESC).I will make a follow-up post about this either later today or tomorrow.
-
@Alex-Kushleyev will you post the instructions here or in a separate thread? If so where would I look?
Understood about the KDE motors.
-
@Chase-Riley , i will probably make a new post, will tag you.
-
@Alex-Kushleyev Awesome. Looking forward to the post.
-
@Alex-Kushleyev Were you able to post the instructions you were talking about? I am waiting on them to run through before I can get out and flight test again.
-
@Chase-Riley , I am working on finalizing this.. should be done today within a few hours. I just wanted to double check - are you able to share which motors / props you are using? I just want to make sure the M0134-6 is powerful enough to support them. Also what battery voltage? 4S or 6S?
-
@Alex-Kushleyev Would rather not share on here. If current draw is your worry I am below a 20 amp peak for each motor so the current 6s ESC should handle them fine. I also have a fan inside the AV blowing directly over the ESC.
-
@Chase-Riley , absolutely no problem regarding sharing the motor / propeller specs.
Alright, i have just posted initial instructions for low-kv motor tuning here : https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/blob/dev/voxl-esc-tools/doc/low_kv_motor_tuning.md . There is also a firmware update version 39 RC11 that you will need to install (this is part of the tuning instructions).
Please go ahead and work through the procedure. It is quite detailed and goes beyond what is needed just for low-kv motors, but it represents pretty rigorous initial test that should be performed to ensure your motor will operate smoothly under various conditions.
The parameter file
../voxl-esc-params/low_kv/mn4006_m0134_6_low_kv.xmlshould be a good start for your application, but do follow the instructions to check / update the params as instructed.Please let me know if you run into any issue or need clarification.
The main idea behind testing new motor/prop combination is to start with "easy" tests and gradually ramp up the scope of test as you look at the data and become confident that it is working well. I would definitely avoid doing things like plugging in a new motor and prop and just going to 100% power command without a ramp :).
I will be improving / updating the instructions in the coming days and will keep you posted about any major updates.
-
@Chase-Riley , i forgot to mention.. a small fan blowing air over the ESC may not result in much cooling. Airflow from propellers could provide a lot more cooling than a small fan. Please keep an eye on the temperatures of the ESC. After you perform the tuning and calibration, you can run all 4 motors (loaded with propellers) on the bench at hover rpm (rpm needed for your vehicle to hover) for several minutes and look at the ESC temp (it will be printed live in the terminal when you use
voxl-esc-spin.pytest script.- Ideally the ESC temperature should stay below 60-70 C
- 80C is acceptable
- 90C is worrisome
- 100C and above is critical
ESC should still operate above 125C. The temperature on M0134-6 is measured inside the MCU, so the Mosfets are likely to be even hotter. At that point you will probably run into thermal runaway (the hotter the ESC gets, the faster it will continue to heat up) and eventually mosfets and / or copper traces may burn up.
-
@Alex-Kushleyev I was able to install the new firmware to the ESC, however when I am trying to upload the new params file
../voxl-esc-params/low_kv/mn4006_m0134_6_low_kv.xmlI receive the following error.[GCC 8.4.0] Found voxl-esc tools bin version: 1.2 INFO: Params file name : /usr/share/modalai/voxl-esc-params/low_kv/mn4006_m0134_6_low_kv.xml INFO: Params file size : 8365 bytes VOXL Platform: M0054 Detected VOXL2 M0054 or M0104! Found previous connection information in .voxl_esc_cache .. Prioritizing /dev/slpi-uart-2 @ 250000 INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 250000 Sending library name request: libslpi_uart_bridge_slpi.so Received standard error event 2 Sending initialization request INFO: ESC(s) detected on port: /dev/slpi-uart-2, baud rate: 250000 INFO: ESCs detected: INFO: --------------------- ID: 0, SW: 39, HW: 41: Unknown Board ID: 1, SW: 39, HW: 41: Unknown Board ID: 2, SW: 39, HW: 41: Unknown Board ID: 3, SW: 39, HW: 41: Unknown Board --------------------- ERROR: ESC firmware version 39 is incompatible with params supported by this utility Acceptable ESC firmware versions are: [38]``` -
@Chase-Riley please use the latest
voxl-esctools from dev branch:git clone https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc.git -b devyou can clone that directly to voxl2 and just use the python scripts directly (instead of
voxl-escwrapper), since you working on a custom esc tuning.Some helpful tips here too : https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/blob/dev/voxl-esc-tools/recovery.md
-
@Alex-Kushleyev I made sure to have the latest version and know I can not detect the esc. See below.
Detected Python version : 3.6.9 (default, Mar 10 2023, 16:46:00) [GCC 8.4.0] Found voxl-esc tools bin version: 1.5 VOXL Platform: M0054 Detected RB5 Flight, VOXL2 M0054 or M0104! INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000 /usr/lib/libvoxl_io.so: undefined symbol: voxl_uart_init_legacy_slpi INFO: Scanning for ESC bootloader: /dev/slpi-uart-2, baud: 230400 /usr/lib/libvoxl_io.so: undefined symbol: voxl_uart_init_legacy_slpi WARNING: No ESC(s) detected VOXL Platform: M0054 Detected RB5 Flight, VOXL2 M0054 or M0104! INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 250000 /usr/lib/libvoxl_io.so: undefined symbol: voxl_uart_init_legacy_slpi INFO: Scanning for ESC bootloader: /dev/slpi-uart-2, baud: 230400 /usr/lib/libvoxl_io.so: undefined symbol: voxl_uart_init_legacy_slpi WARNING: No ESC(s) detected VOXL Platform: M0054 Detected RB5 Flight, VOXL2 M0054 or M0104! INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 921600 /usr/lib/libvoxl_io.so: undefined symbol: voxl_uart_init_legacy_slpi INFO: Scanning for ESC bootloader: /dev/slpi-uart-2, baud: 230400 /usr/lib/libvoxl_io.so: undefined symbol: voxl_uart_init_legacy_slpi WARNING: No ESC(s) detected VOXL Platform: M0054 Detected RB5 Flight, VOXL2 M0054 or M0104! INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 230400 /usr/lib/libvoxl_io.so: undefined symbol: voxl_uart_init_legacy_slpi INFO: Scanning for ESC bootloader: /dev/slpi-uart-2, baud: 230400 /usr/lib/libvoxl_io.so: undefined symbol: voxl_uart_init_legacy_slpi WARNING: No ESC(s) detected VOXL Platform: M0054 Detected RB5 Flight, VOXL2 M0054 or M0104! INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 57600 /usr/lib/libvoxl_io.so: undefined symbol: voxl_uart_init_legacy_slpi INFO: Scanning for ESC bootloader: /dev/slpi-uart-2, baud: 230400 /usr/lib/libvoxl_io.so: undefined symbol: voxl_uart_init_legacy_slpi WARNING: No ESC(s) detected VOXL Platform: M0054 Detected RB5 Flight, VOXL2 M0054 or M0104! INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 115200 /usr/lib/libvoxl_io.so: undefined symbol: voxl_uart_init_legacy_slpi INFO: Scanning for ESC bootloader: /dev/slpi-uart-2, baud: 230400 /usr/lib/libvoxl_io.so: undefined symbol: voxl_uart_init_legacy_slpi WARNING: No ESC(s) detected ERROR: not all ESCs found -
@Chase-Riley said in KDE 4012XF motors with 16 in props:
/usr/lib/libvoxl_io.so: undefined symbol: voxl_uart_init_legacy_slpi
this error means that you are using relatively old VOXL2 SDK -- the interface for the UART bridge (which connects the DSP uart to CPU) has changed.
Are you able to updated the VOXL2 SDK to 1.1.2? and then repeat the procedure using dev branch of
voxl-esc? -
@Alex-Kushleyev Would rather not update if possible. I have spent months getting everything to work in 1.0. What would be affected if I did make the upgrade? Would I lose any config or param files?
-
@Chase-Riley OK
In this case, please try
voxl-escfrom this commit : https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/tree/066b6308611ac162342a716689d1b4ebe82b1a63This is right before the DSP bridge interface changed and it should support firmware 39 in param update:
https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/blob/066b6308611ac162342a716689d1b4ebe82b1a63/voxl-esc-tools/voxl-esc-upload-params.py#L58However, still use the firmware and params that i originally posted for the low kv motor tuning
-
also tag 1.3.2 should work https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/tags/v1.3.2
-
@Alex-Kushleyev 1.3.2 seemed to have got the job done. I will let you know if I run in to anymore issues while tuning the esc.