No Odometry in QGC through MAVLink
-
Problem: My Sentinel drone with VOXL SDK 1.0, drifts when I take off. It drifts a lot when I take off in
Manualmode, and when I take off inPositionmode, it drifts with a blow of wind.One of the problems I noticed is that I cannot see
Odometrymessages inside the MAVLink Inspector, and the frequency ofLOCAL_POSITION_NEDis also 1.0 Hz.
How can I enable Odometry and also increase the frequency ofLOCAL_POSITION_NED?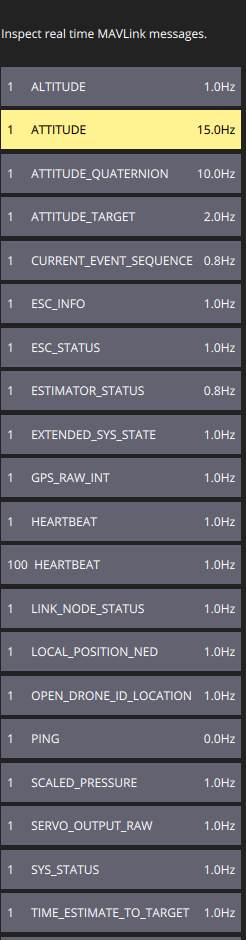
-
-
@SMRazaRizvi Make sure your vio is running, and there are certain parameters that needs to be enabled in QGC for it to hold position, check whether you have done it
-
@Jetson-Nano Can you please mention those parameters here, and their correct values?
-
@SMRazaRizvi Sorry for the delayed response
for PX4 version 1.14 the paramters are https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.14/EKF2_helpers/indoor_vio.params
for PX4 version 1.12 the paramters are https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.12/ekf2_indoor_vio.params
-
@Jetson-Nano
Thank you for your response.But these are the parameters for indoor, I am testing outdoors.
I tried
But still same issue.
-
@SMRazaRizvi You have to setup GPS and make EKF Aid mask use GPS, and I don't think using GPS will give you odometry data, you might get some sort of global position which helps you hold position and navigate