No Odometry in QGC through MAVLink
-
Problem: My Sentinel drone with VOXL SDK 1.0, drifts when I take off. It drifts a lot when I take off in
Manualmode, and when I take off inPositionmode, it drifts with a blow of wind.One of the problems I noticed is that I cannot see
Odometrymessages inside the MAVLink Inspector, and the frequency ofLOCAL_POSITION_NEDis also 1.0 Hz.
How can I enable Odometry and also increase the frequency ofLOCAL_POSITION_NED?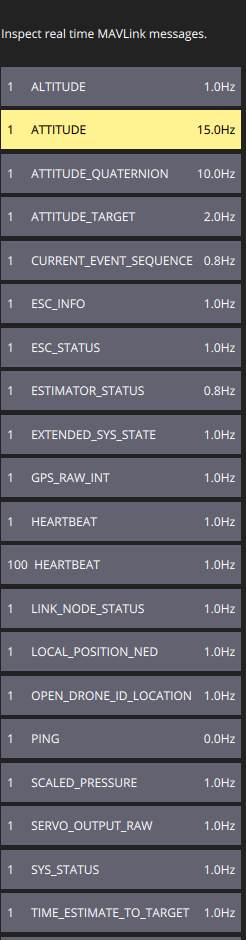
-
Problem: My Sentinel drone with VOXL SDK 1.0, drifts when I take off. It drifts a lot when I take off in
Manualmode, and when I take off inPositionmode, it drifts with a blow of wind.One of the problems I noticed is that I cannot see
Odometrymessages inside the MAVLink Inspector, and the frequency ofLOCAL_POSITION_NEDis also 1.0 Hz.
How can I enable Odometry and also increase the frequency ofLOCAL_POSITION_NED? -
@SMRazaRizvi Make sure your vio is running, and there are certain parameters that needs to be enabled in QGC for it to hold position, check whether you have done it
-
@SMRazaRizvi Make sure your vio is running, and there are certain parameters that needs to be enabled in QGC for it to hold position, check whether you have done it
@Jetson-Nano Can you please mention those parameters here, and their correct values?
-
@Jetson-Nano Can you please mention those parameters here, and their correct values?
@SMRazaRizvi Sorry for the delayed response
for PX4 version 1.14 the paramters are https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.14/EKF2_helpers/indoor_vio.params
for PX4 version 1.12 the paramters are https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.12/ekf2_indoor_vio.params
-
@SMRazaRizvi Sorry for the delayed response
for PX4 version 1.14 the paramters are https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.14/EKF2_helpers/indoor_vio.params
for PX4 version 1.12 the paramters are https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.12/ekf2_indoor_vio.params
@Jetson-Nano
Thank you for your response.But these are the parameters for indoor, I am testing outdoors.
I tried

params/v1.14/EKF2_helpers/outdoor_gps_baro.params · master · voxl / VOXL SDK / Utilities / voxl-px4-params · GitLab
PX4 parameter files for use on VOXL2 and Flight Core

GitLab (gitlab.com)
params/v1.14/platforms/Sentinel_V1.params · master · voxl / VOXL SDK / Utilities / voxl-px4-params · GitLab
PX4 parameter files for use on VOXL2 and Flight Core
GitLab (gitlab.com)
But still same issue.
-
@Jetson-Nano
Thank you for your response.But these are the parameters for indoor, I am testing outdoors.
I tried
params/v1.14/EKF2_helpers/outdoor_gps_baro.params · master · voxl / VOXL SDK / Utilities / voxl-px4-params · GitLab
PX4 parameter files for use on VOXL2 and Flight Core
GitLab (gitlab.com)
params/v1.14/platforms/Sentinel_V1.params · master · voxl / VOXL SDK / Utilities / voxl-px4-params · GitLab
PX4 parameter files for use on VOXL2 and Flight Core
GitLab (gitlab.com)
But still same issue.
@SMRazaRizvi You have to setup GPS and make EKF Aid mask use GPS, and I don't think using GPS will give you odometry data, you might get some sort of global position which helps you hold position and navigate
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login