voxl-dfs-server Crashes
-
Hello everyone,
I have sentinel drone and upgraded to SDK 1.0 while following the documentation. The board and services details are as follow.
voxl2:/$ voxl-inspect-sku family code: MRB-D0006 (sentinel) compute board: 4 (voxl2) hw version: 1 cam config: 11 SKU: MRB-D0006-4-V1-C11 voxl2:/$ voxl-version -------------------------------------------------------------------------------- system-image: 1.6.2-M0054-14.1a-perf kernel: #1 SMP PREEMPT Fri May 19 22:19:33 UTC 2023 4.19.125 -------------------------------------------------------------------------------- hw version: M0054 -------------------------------------------------------------------------------- voxl-suite: 1.0.0 -------------------------------------------------------------------------------- Packages: Repo: http://voxl-packages.modalai.com/ ./dists/qrb5165/sdk-1.0/binary-arm64/ Last Updated: 2023-03-02 12:58:27 WARNING: repo file has changed since last update, packages may have originated from a different repo List: libmodal-cv 0.3.2 libmodal-exposure 0.0.8 libmodal-journal 0.2.2 libmodal-json 0.4.3 libmodal-pipe 2.8.5 libqrb5165-io 0.2.0 libvoxl-cci-direct 0.1.5 libvoxl-cutils 0.1.1 mv-voxl 0.1-r0 qrb5165-bind 0.1-r0 qrb5165-dfs-server 0.1.0 qrb5165-imu-server 0.6.0 qrb5165-slpi-test-sig 01-r0 qrb5165-system-tweaks 0.2.2 qrb5165-tflite 2.8.0-2 voxl-bind-spektrum 0.1.0 voxl-camera-calibration 0.4.0 voxl-camera-server 1.6.2 voxl-configurator 0.2.7 voxl-cpu-monitor 0.4.6 voxl-docker-support 1.2.5 voxl-eigen3 3.4.0 voxl-elrs 0.0.7 voxl-esc 1.2.2 voxl-feature-tracker 0.2.3 voxl-flow-server 0.3.3 voxl-gphoto2-server 0.0.10 voxl-jpeg-turbo 2.1.3 voxl-lepton-server 1.1.2 voxl-libgphoto2 0.0.4 voxl-libuvc 1.0.7 voxl-logger 0.3.4 voxl-mavcam-manager 0.5.1 voxl-mavlink 0.1.1 voxl-mavlink-server 1.2.0 voxl-modem 1.0.5 voxl-mongoose 7.7.0-1 voxl-mpa-to-ros 0.3.6 voxl-mpa-tools 1.0.4 voxl-opencv 4.5.5-1 voxl-portal 0.5.9 voxl-px4 1.14.0-2.0.34 voxl-px4-imu-server 0.1.2 voxl-px4-params 0.1.8 voxl-qvio-server 0.9.3 voxl-remote-id 0.0.8 voxl-slpi-uart-bridge 1.0.1 voxl-streamer 0.7.1 voxl-suite 1.0.0 voxl-tag-detector 0.0.4 voxl-tflite-server 0.3.1 voxl-utils 1.3.1 voxl-uvc-server 0.1.6 voxl-vision-hub 1.6.6 voxl2-system-image 1.6.2-r0 voxl2-wlan 1.0-r0 -------------------------------------------------------------------------------- voxl2:/$ voxl-inspect-services -v Scanning services... Service Name | Version | Enabled | Running | CPU Usage ---------------------------------------------------------------------------- docker-autorun | 1.2.5 | Disabled | Not Running | docker-daemon | 1.2.5 | Disabled | Not Running | modallink-relink | 1.0.5 | Disabled | Not Running | voxl-camera-server | 1.6.2 | Enabled | Running | 81.7% voxl-cpu-monitor | 0.4.6 | Enabled | Running | 0.6% voxl-dfs-server | 0.1.0 | Enabled | Not Running | voxl-feature-tracker | 0.2.3 | Disabled | Not Running | voxl-flow-server | 0.3.3 | Disabled | Not Running | voxl-imu-server | 0.6.0 | Enabled | Running | 5.9% voxl-lepton-server | 1.1.2 | Disabled | Not Running | voxl-mavcam-manager | 0.5.1 | Enabled | Running | 0.0% voxl-mavlink-server | 1.2.0 | Enabled | Running | 3.9% voxl-modem | 1.0.5 | Disabled | Not Running | voxl-portal | 0.5.9 | Enabled | Running | 0.4% voxl-px4-imu-server | 0.1.2 | Disabled | Not Running | voxl-px4 | 1.14.0 | Enabled | Running | 40.8% voxl-qvio-server | 0.9.3 | Enabled | Running | 36.7% voxl-remote-id | 0.0.8 | Disabled | Not Running | voxl-softap | 0.2.2 | Disabled | Not Running | voxl-static-ip | 0.2.2 | Disabled | Not Running | voxl-streamer | 0.7.1 | Enabled | Running | 0.0% voxl-tag-detector | 0.0.4 | Disabled | Not Running | voxl-tflite-server | 0.3.1 | Disabled | Not Running | voxl-time-sync | 1.3.1 | Disabled | Not Running | voxl-uvc-server | 0.1.6 | Disabled | Not Running | voxl-vision-hub | 1.6.6 | Enabled | Running | 2.1% voxl-wait-for-fs | 1.3.1 | Enabled | Completed |The problem is with running voxl-dfs-server command, the program exit after running less than a few second with the following error
voxl2:/$ voxl-dfs-server --debug Enabling debug mode ================================================================= min_disparity: 4 max_disparity: 64 min_threshold: 10 cost_threshold: 10 width: 640 height: 480 pc_skip_n_lines: 4 dfs pair #0 enable: 1 input_pipe: stereo_front skip_n_frames: 1 blur_size: 0 post_median_size: 0 intrinsics_file: /data/modalai/opencv_stereo_front_intrinsics.yml extrinsics_file: /data/modalai/opencv_stereo_front_extrinsics.yml dfs pair #1 enable: 1 input_pipe: stereo_rear skip_n_frames: 1 blur_size: 0 post_median_size: 0 intrinsics_file: /data/modalai/opencv_stereo_rear_intrinsics.yml extrinsics_file: /data/modalai/opencv_stereo_rear_extrinsics.yml ================================================================= loading calibration files for Pair #0, loaded these lens params: f: 497.433807 cx: 299.806549 cy: 251.570435 baseline_m: 0.080547 for Pair #1, loaded these lens params: f: 501.798187 cx: 280.967346 cy: 222.201584 baseline_m: 0.080042 initializing dfs module connected to pipe stereo_front connected to pipe stereo_rear ch1 starting processing ch0 starting processing ch1 starting processing ch0 starting processing ch1 starting processing ch0 starting processing client voxl-vision-hub0 connected to ch 5 client voxl-vision-hub0 connected to ch 2 *** stack smashing detected ***: <unknown> terminated AbortedEach time I run voxl-dfs-server disparity image on the portal update for a split second and freezes as the service crashes.
I tried to installing qrb5165-dfs-server from the source code with qrb5165 and with different versions dev, stag, sdk1.0, sdk0.9 but this time i got this error. With fresh install disparity image in portal doesn't update at all.
voxl2:/$ voxl-dfs-server --debug voxl-dfs-server: symbol lookup error: voxl-dfs-server: undefined symbol: mcv_create_stereo_undistort_gridI already did fresh SDK install again but the problem still continues.
Looking forward to your help. Thank you.
Emre -
How did you upgrade the SDK? Did you upgrade the full platform image? These symptoms look like a software mismatch.
Please follow the instructions for installing a Full VOXL-SDK Release: https://docs.modalai.com/flash-system-image/#flashing-a-voxl-sdk-release
-
@Moderator Yes I installed full VOXL-SDK as outlined in the documentation with the following command. Set sku, camera configuration to leave as.
tar -xzvf voxl2_SDK_1.0.0.tar.gz cd voxl2_SDK_1.0.0 ./install.shIn my latest install, I set voxl-configure-sku configuration as "3) sentinel" and as "11 tracking(ov7251) + Hires(imx214) + Dual Stereo" but I still got the "*** stack smashing detected ***: <unknown> terminated" error.
I'll revert back to VOXL2 Platform 0.9.5 to see if this changes anything.
-
@esaldiran can you take a picture or draw a diagram of your setup? Have you changed any cabling? It has to be a specific way
-
Hi @Chad-Sweet,
I am using Sentinel Drone with default configuration and did not change anything at all. I encountered this problem while following the documentation.
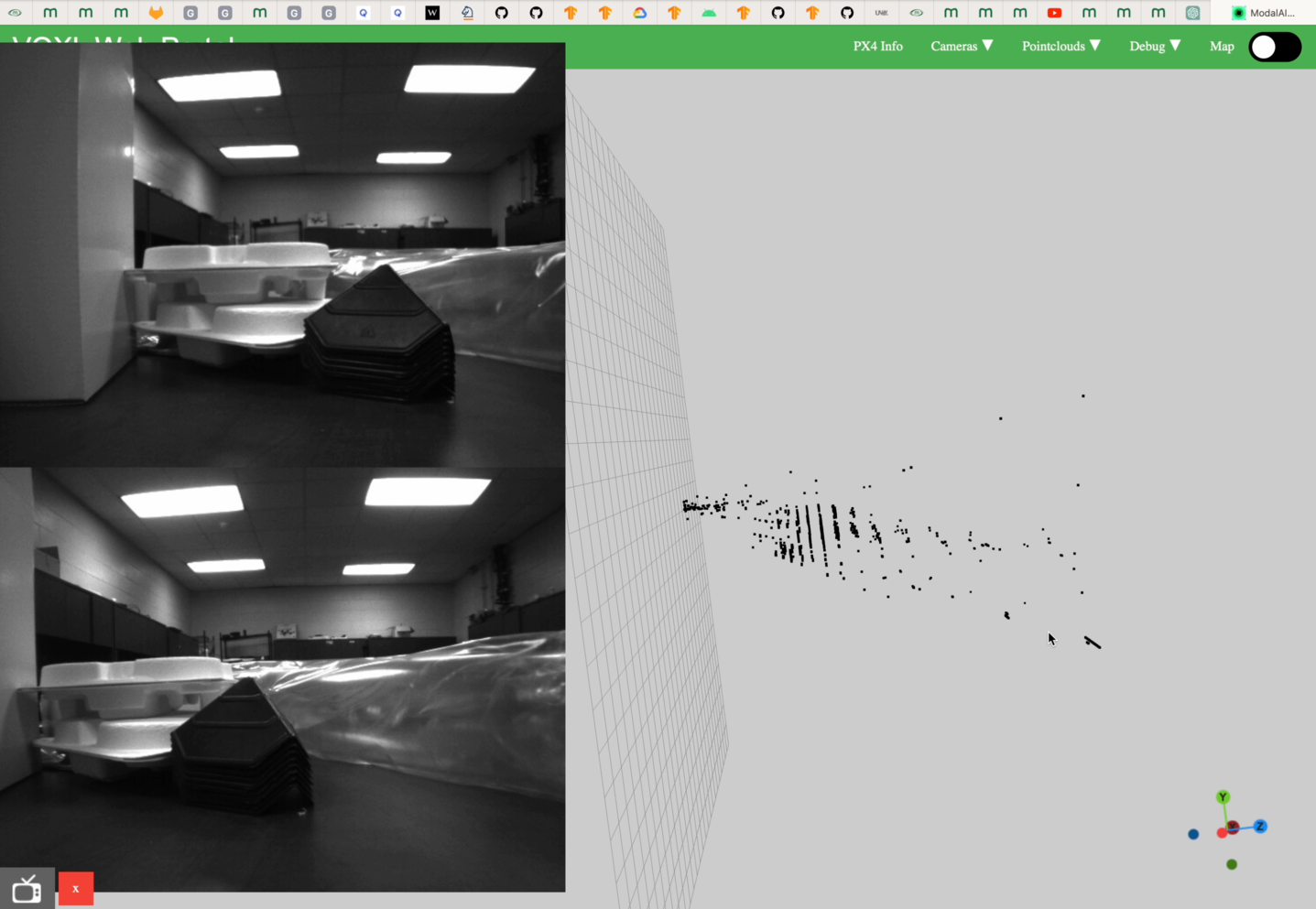
I reverted back to VOXL2 Platform 0.9.5 without any configuration change and I can start voxl-dfs-server without any crash and I can see the results on portal.
Please let me know if you need any more info.
-
@esaldiran @Chad-Sweet @Moderator The same issue was occurring for me, I am now running the dfs server on SDK 0.9.5 perfectly.