Voxl-camera-server crash after undefined time
-
Greetings,
we're trying to use the Seeker drone with docker, ros and mavros.
We managed to get the position with /mavros/local_position/odom, but after a while x and y values are fixed to 0.0. Only the z receives updates.
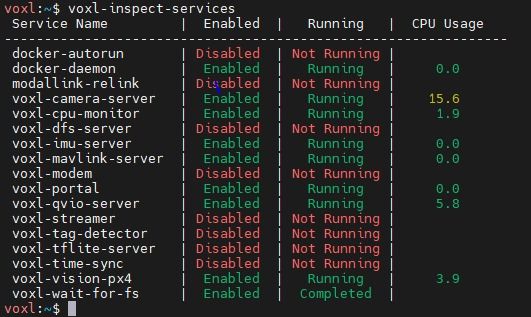
We checked the services on the drone and voxl-camera-server was not running. This is a problem that we had for some time now without a solution.
We flashed the SDK 0.9.5 according to this post https://forum.modalai.com/topic/1272/mavlink-odometry-x-y-value-0/63 in case of a mismatch, but this problem seems to persist.
After an apparently random amount of time, voxl-camera-server stops running.
How can we solve this?system-image: 4.0.0
kernel: #1 SMP PREEMPT Thu Oct 13 17:57:05 UTC 2022 3.18.71-perf
hw: VOXL
voxl-site: 0.9.5We attach a pic of the services we're using during these tests.
-
Are you flying? You are likely hitting thermal limits, in which case Linux will start killing services. When flying there is a ton of airflow and should not hit thermal issues. On the ground though, you should point a fan at the drone if you are running a lot of software for more than a few minutes.
-
@Moderator
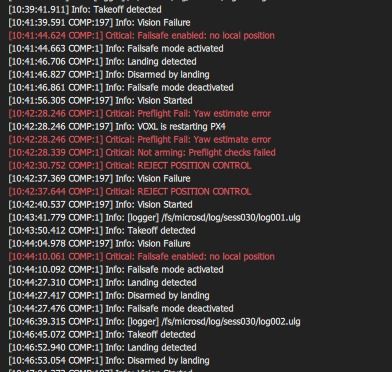
We did two flight tests inside our office in a luminous environment. Temperature seems to be lower while flying (around 60°C), and voxl-camera-server didn't stop. Yet, we could not do extensive tests because in both cases the px4 changed the flight mode from Position to Stabilize for visual failures. We attach a screenshot from QGC.!!