Voxl-camera-server crash after undefined time
-
Greetings,
we're trying to use the Seeker drone with docker, ros and mavros.
We managed to get the position with /mavros/local_position/odom, but after a while x and y values are fixed to 0.0. Only the z receives updates.
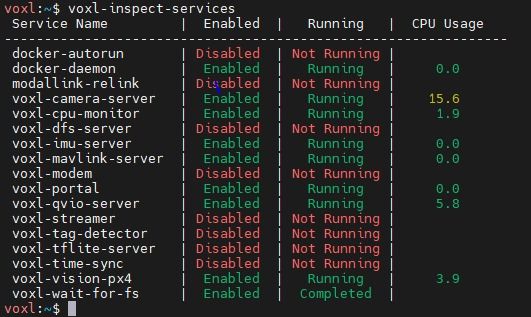
We checked the services on the drone and voxl-camera-server was not running. This is a problem that we had for some time now without a solution.
We flashed the SDK 0.9.5 according to this post https://forum.modalai.com/topic/1272/mavlink-odometry-x-y-value-0/63 in case of a mismatch, but this problem seems to persist.
After an apparently random amount of time, voxl-camera-server stops running.
How can we solve this?system-image: 4.0.0
kernel: #1 SMP PREEMPT Thu Oct 13 17:57:05 UTC 2022 3.18.71-perf
hw: VOXL
voxl-site: 0.9.5We attach a pic of the services we're using during these tests.
-
Are you flying? You are likely hitting thermal limits, in which case Linux will start killing services. When flying there is a ton of airflow and should not hit thermal issues. On the ground though, you should point a fan at the drone if you are running a lot of software for more than a few minutes.
-
Are you flying? You are likely hitting thermal limits, in which case Linux will start killing services. When flying there is a ton of airflow and should not hit thermal issues. On the ground though, you should point a fan at the drone if you are running a lot of software for more than a few minutes.
@Moderator
We did two flight tests inside our office in a luminous environment. Temperature seems to be lower while flying (around 60°C), and voxl-camera-server didn't stop. Yet, we could not do extensive tests because in both cases the px4 changed the flight mode from Position to Stabilize for visual failures. We attach a screenshot from QGC.!!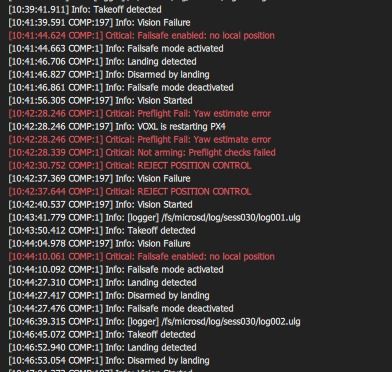
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login