Collision Warning sign
-
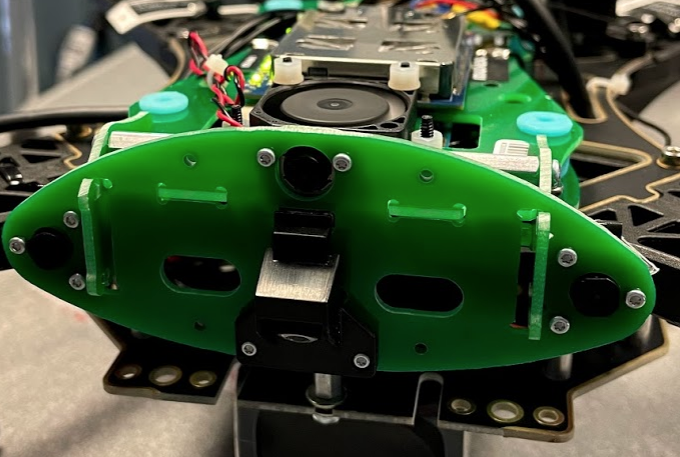
Hi, We were testing the collision avoidance feature in the voxl Modal 500 drone, and we found it was working fine with the frame it came with. We then wanted to change the frame and we used one of our frame with Octo Coaxial setup. After initial setup and changing all the necessary parameter as shown in the links 1. https://gitlab.com/voxl-public/flight-core-px4/px4-parameters/-/tree/master/helpers , 2. https://gitlab.com/voxl-public/flight-core-px4/px4-parameters/-/blob/master/helpers/collision_prevention.params, 3. https://gitlab.com/voxl-public/flight-core-px4/px4-parameters/-/blob/master/helpers/ekf2_indoor_vio.params , we thought the collision avoidance will be same. But after arming every time when we are applying any pitch or roll command the PX4 QGC is showing us
Collision Warningerror as shown in here
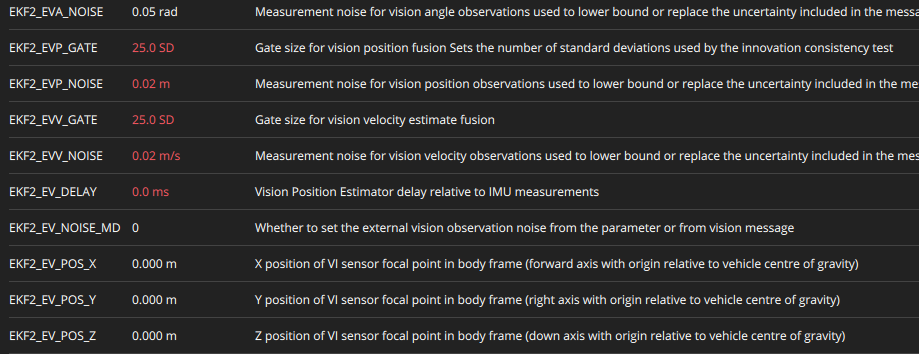
Also at the same time the vehicle is not moving in any direction. Below are the parameters applied to the vehicle



We also tried to debug whether the distance topic is populated using
voxl-vision-px4by using thevoxl-vision-px4 -scommand and these the results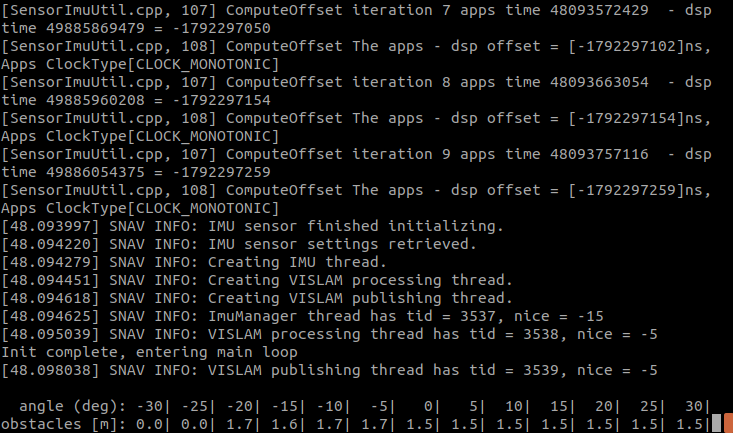
But if we do not use the collision and use a negative value in the
cp_distthe vehicle works fine in outdoor using GPS.We will appreciate any help regarding solving this issue.
-
It does look like it thinks there are lots of obstacles. Did you recalibrate the stereo cameras? The depth from stereo is based almost entirely on camera extrinsic calibration
You can see how to calibrate cameras here: https://docs.modalai.com/calibrate-cameras/
-
@Chad-Sweet we did not re-calibrated the stereo camera since we moved it from the M500 unit it came with. I can try the calibration process and let you all know.
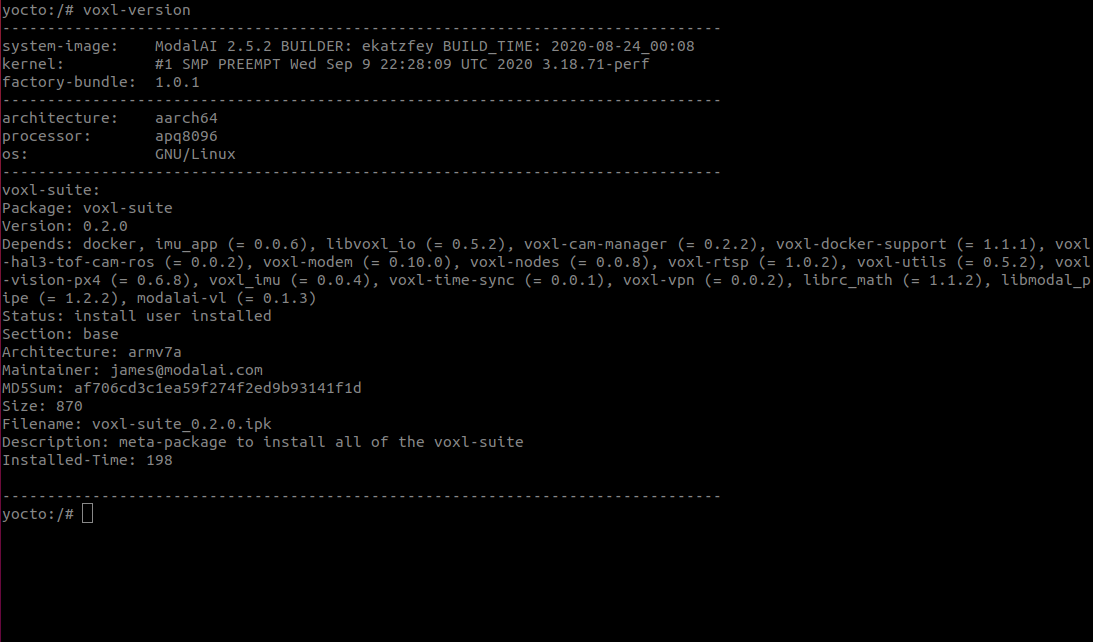
@shlee853 I think we are using volx-suite 0.2.0, here is the screen shot of the version:
Note: Though it shows continuous
collision warningfrom the QGC we still tested the flight against a wall for collision prevention test. It performs as expected and stops at 1.5 meter from the wall. The only issue it shows continuous collision warning sign. -
@Chad-Sweet we did not re-calibrated the stereo camera since we moved it from the M500 unit it came with. I can try the calibration process and let you all know.
@shlee853 I think we are using volx-suite 0.2.0, here is the screen shot of the version:
Note: Though it shows continuous
collision warningfrom the QGC we still tested the flight against a wall for collision prevention test. It performs as expected and stops at 1.5 meter from the wall. The only issue it shows continuous collision warning sign. -
Update:
-
I have performed the calibration process as you mentioned for both Stereo camera and tracking camera by following the calibration documentation https://docs.modalai.com/calibrate-cameras/ though they are not moved from their original position of VOXL flight deck.
-
While performing the calibration for stereo cameras I have also fixed the focus for both left and right camera. But after the calibration process the collision prevention does not seem to be working any more.
-
By that I mean the the obstacle topic does not seems to detect anything even it is very close or far from the wall. I also tried with different object to see if the camera can pick up the difference but it does not seems to be consistent any more.
-
At 0 degree angle it mostly shows 0 m. It only shows some value while it is in the ground but once flying it is completely 0 m in withing +- 30 deg angle range.
-
After several try I decided to perform the calibration process again, and after the process I found same result. I also tried to change the
CP_distfrom QGC parameter ranging from 0.5- 10 meter but it does not seems to work anymore. -
Then i realized I have made a big mistake by not saving the default
calibration.stereo.xmlfile for calibration and then I found the sample calibration file in thevoxl-camera-calibrationgit folder which then I replaced it with the calibrated file. -
Once this process is complete I then fly the Modal AI m500 and it worked almost as before but the CP_dist value of 1.5 m seems now too much and we reduced it to 0.8 meter.
-
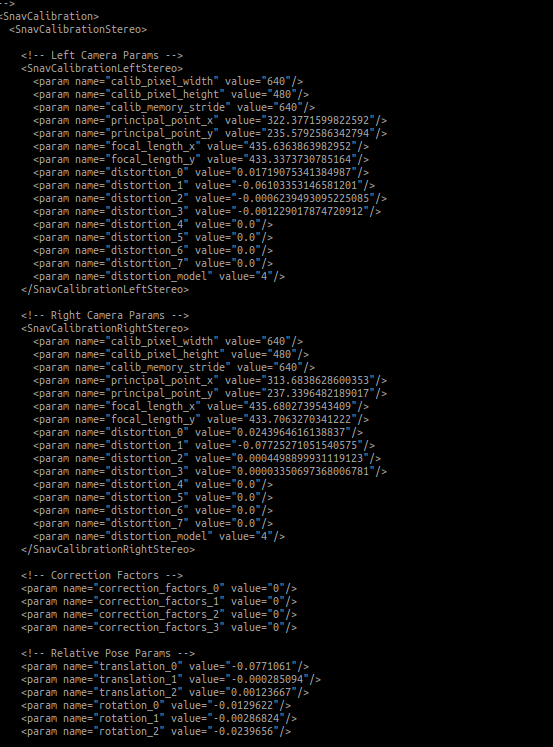
This the sample calibration.xml snippet from the git hub link:
-
I also noticed the
focal_length_x and y for calibrated camera is ranging from 488-490for both camera value which is much higher value after the calibration process compared with the sample calibration file shown above.
Please let us know what can be done to correct this calibration problem or at least how I can obtain the default factory calibration data from modal ai.
-
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login