Low stability in qvio due to low number of features
-
Currently, I'm using the voxl-cam for vio only. It's mounted on my self-made drone without px-4 (I only want to receive the qvio data).
During flight, the vio resets due to a low number of features (and then it takes time to initialize again). I'm adding some images of the qvio overlay, with cases where the image seems fine and the drone is stable (by the way it can happen on the ground as well), but not enough features were found
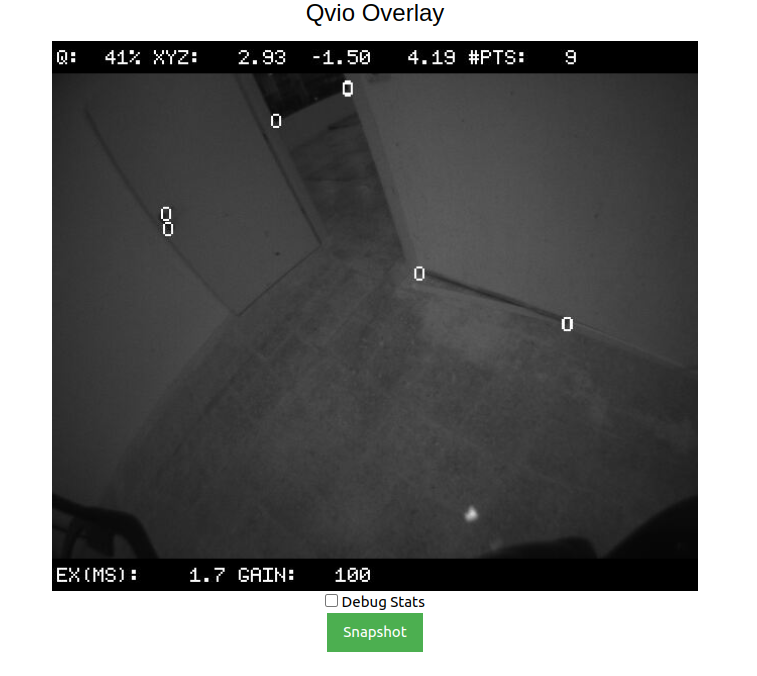

Is there a way to increase the number of valid "good" features? Or maybe another way to increase the stability of the algorithm?
-
White walls are very tough for any computer vision algorithm, so those may not ever work well
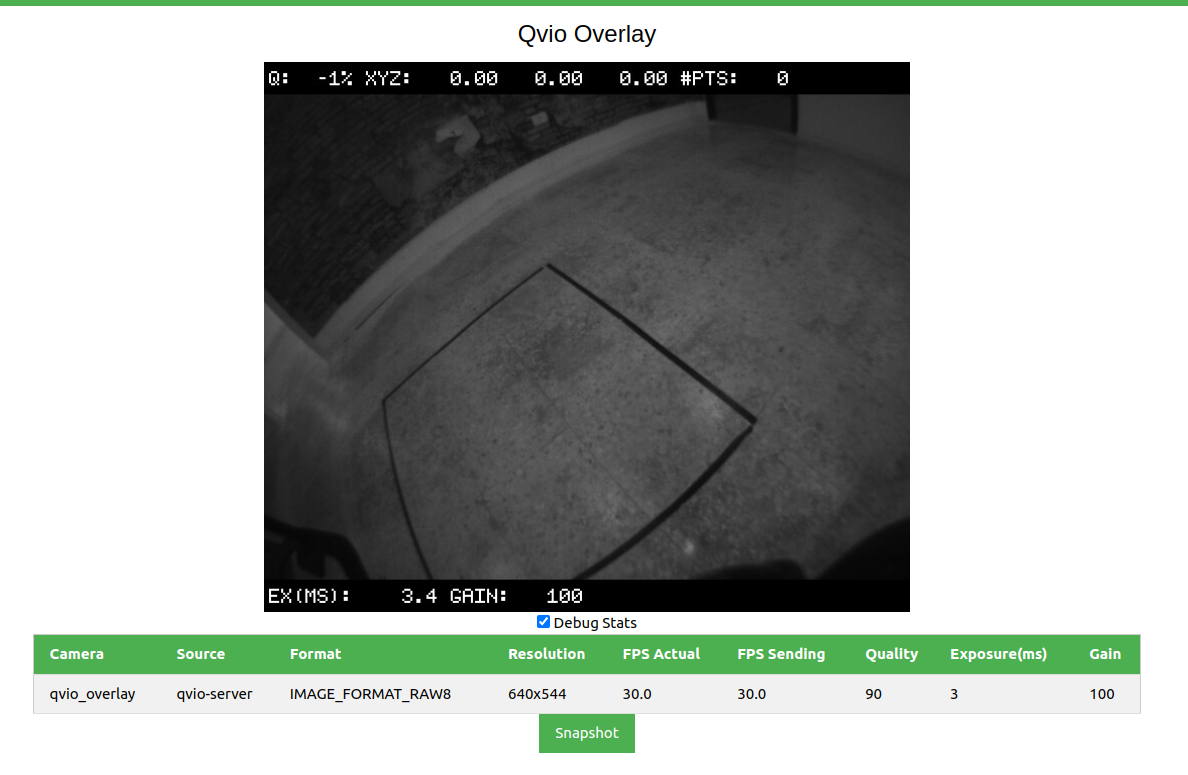
The images look darker than I would expect. Have you tweaked the exposure settings at all? you could try increasing the ae_desired_msv which is configured in voxl-camera-server and see if that helps add contrast
-
Thank you very much! it seems to work a lot better. I've increased ae_desired_msv from 60 to 80.
-
Thank you very much! it seems to work a lot better. I've increased ae_desired_msv from 60 to 80.
@Erez-Nehama What command did you type in to increase the "ae_desired_msv"? I've tried using voxel-camer-server and voxel-send-command but neither let me change that value directly @Chad-Sweet
-
@Erez-Nehama What command did you type in to increase the "ae_desired_msv"? I've tried using voxel-camer-server and voxel-send-command but neither let me change that value directly @Chad-Sweet
-
@Joshua-Ermias It can be set in
/etc/modalai/voxl-camera-server.conf -
@tom would you recommend using a text editor like Vim and restarting the service or is there a better way to do it?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login