VOA suddenly stopped working
-
Hello,
For some reason my VOA suddenly stopped working.
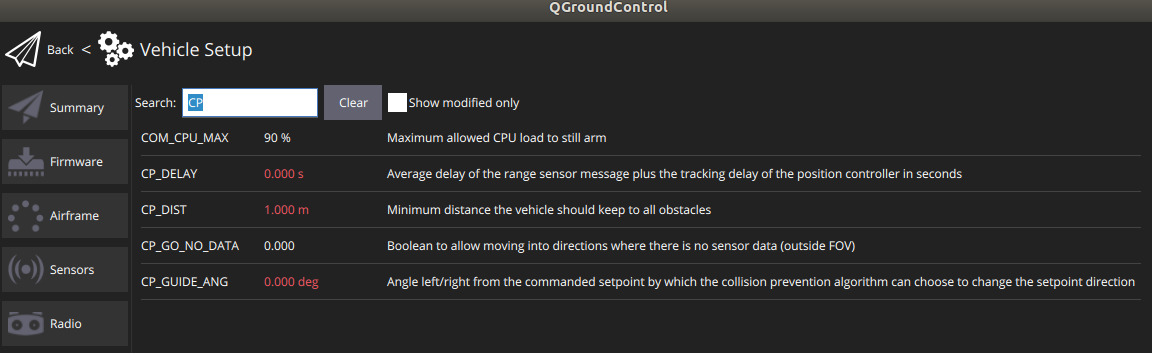
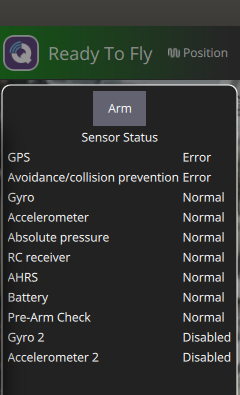
In my PX4 config files, I have (always had) my VIO and VOA enabled.Now, when I start PX4 and change the CP_DIST to anything other than a negative value, I get "Avoidance/collision prevention Error" in QGC.
voxl:~$ voxl-vision-px4 -o detected platform APQ8096 loading our own config file ================================================================= Parameters as loaded from config file: config file version: 1 qgc_ip: 192.168.110.146 en_secondary_qgc: 0 secondary_qgc_ip: 192.168.1.214 qgc_udp_port_number: 14550 udp_mtu: 512 en_localhost_mavlink_udp 1 localhost_udp_port_number: 14551 en_vio: 1 en_voa: 1 en_send_vio_to_qgc: 1 en_send_voa_to_qgc: 1 voa_upper_bound_m: -0.150000 voa_lower_bound_m: 0.150000 en_set_clock_from_gps: 1 en_force_onboard_mav1_mode: 1 en_reset_px4_on_error: 1 qvio_auto_reset_quality: 0.000500 horizon_cal_tolerance: 0.300000 offboard_mode: trajectory follow_tag_id: 0 figure_eight_move_home: 1 en_tag_fixed_frame: 0 fixed_frame_filter_len: 5 en_transform_mavlink_pos_setpoints_from_fixed_frame:0 ================================================================= loading extrinsics config file exising instance of voxl-vision-px4 found, attempting to stop it starting geometry module starting px4 monitor starting px4 mavlink starting udp mavlink Adding manual QGC IP address to udp connection list: 192.168.110.146 Added new UDP connection to 192.168.110.146 starting px4 shell starting fixed pose input starting vio manager starting tag manager starting voa manager starting offboard trajectory starting control input pipe Init complete, entering main loop Connected to voxl-dfs-server Connected to TOF Connected to voxl-mavlink-server Detected PX4 Mavlink SYSID 1 Connected to voxl-qvio-server updating to use imu: imu1 done updating transforms to use imu: imu1 T_body_wrt_local: -0.05 0.00 -0.01 RPY: -0.01 0.33 -0.07 velocity: 0.00 0.02 -0.00 T_body_wrt_local: -0.05 0.00 -0.01 RPY: -0.01 0.33 -0.07 velocity: 0.00 0.02 -0.00 detected system time has already been set T_body_wrt_local: -0.05 0.00 -0.01 RPY: -0.01 0.33 -0.07 velocity: 0.00 0.02 -0.00 T_body_wrt_local: -0.05 0.00 -0.01 RPY: -0.01 0.33 -0.07 velocity: 0.00 0.02 -0.00 T_body_wrt_local: -0.05 0.00 -0.01 RPY: -0.01 0.33 -0.07 velocity: 0.00 0.02 -0.00 T_body_wrt_local: -0.05 0.00 -0.01 RPY: -0.01 0.33 -0.07 velocity: 0.00 0.02 -0.00 T_body_wrt_local: -0.05 0.00 -0.01 RPY: -0.01 0.33 -0.07 velocity: 0.00 0.02 -0.00 T_body_wrt_local: -0.05 0.00 -0.01 RPY: -0.01 0.33 -0.07 velocity: 0.00 0.02 -0.00 T_body_wrt_local: -0.05 0.00 -0.01 RPY: -0.01 0.33 -0.07 velocity: 0.00 0.02 -0.00 T_body_wrt_local: -0.05 0.00 -0.01 RPY: -0.01 0.33 -0.07 velocity: 0.00 0.02 -0.00 T_body_wrt_local: -0.05 0.00 -0.01 RPY: -0.01 0.33 -0.07 velocity: 0.00 0.02 -0.00 T_body_wrt_local: -0.05 0.00 -0.01 RPY: -0.01 0.33 -0.07 velocity: 0.00 0.02 -0.00 T_body_wrt_local: -0.05 0.00 -0.01 RPY: -0.01 0.33 -0.07 velocity: 0.00 0.02 -0.00 T_body_wrt_local: -0.05 0.00 -0.01 RPY: -0.01 0.33 -0.07 velocity: 0.00 0.02 -0.00 T_body_wrt_local: -0.05 0.00 -0.01 RPY: -0.01 0.33 -0.07 velocity: 0.00 0.02 -0.00Service Name | Version | Enabled | Running | CPU Usage --------------------------------------------------------------------------- docker-autorun | 1.2.4 | Disabled | Not Running | docker-daemon | 1.2.4 | Disabled | Not Running | modallink-relink | 0.15.1 | Disabled | Not Running | voxl-camera-server | 0.9.1 | Enabled | Running | 14.2 voxl-cpu-monitor | 0.2.5 | Enabled | Running | 0.0 voxl-dfs-server | 0.2.6 | Enabled | Running | 4.0 voxl-imu-server | 1.0.1 | Enabled | Running | 2.0 voxl-mavlink-server | 0.1.1 | Enabled | Running | 2.0 voxl-modem | 0.15.1 | Disabled | Not Running | voxl-portal | 0.2.6 | Enabled | Running | 0.0 voxl-qvio-server | 0.4.6 | Enabled | Running | 0.0 voxl-streamer | 0.3.1 | Disabled | Not Running | voxl-tag-detector | 0.0.4 | Disabled | Not Running | voxl-tflite-server | 0.2.3 | Disabled | Not Running | voxl-time-sync | 1.1.1 | Disabled | Not Running | voxl-vision-px4 | 1.0.5 | Enabled | Running | 2.0 voxl-wait-for-fs | 1.1.1 | Enabled | Completed |voxl:~$ voxl-vision-px4 -s detected platform APQ8096 loading our own config file ================================================================= Parameters as loaded from config file: config file version: 1 qgc_ip: 192.168.110.146 en_secondary_qgc: 0 secondary_qgc_ip: 192.168.1.214 qgc_udp_port_number: 14550 udp_mtu: 512 en_localhost_mavlink_udp 1 localhost_udp_port_number: 14551 en_vio: 1 en_voa: 1 en_send_vio_to_qgc: 1 en_send_voa_to_qgc: 1 voa_upper_bound_m: -0.150000 voa_lower_bound_m: 0.150000 en_set_clock_from_gps: 1 en_force_onboard_mav1_mode: 1 en_reset_px4_on_error: 1 qvio_auto_reset_quality: 0.000500 horizon_cal_tolerance: 0.300000 offboard_mode: trajectory follow_tag_id: 0 figure_eight_move_home: 1 en_tag_fixed_frame: 0 fixed_frame_filter_len: 5 en_transform_mavlink_pos_setpoints_from_fixed_frame:0 ================================================================= loading extrinsics config file exising instance of voxl-vision-px4 found, attempting to stop it starting geometry module starting px4 monitor starting px4 mavlink starting udp mavlink Adding manual QGC IP address to udp connection list: 192.168.110.146 Added new UDP connection to 192.168.110.146 starting px4 shell starting fixed pose input starting vio manager starting tag manager starting voa manager starting offboard trajectory starting control input pipe Init complete, entering main loop Connected to voxl-mavlink-server index: 0 dist: none back index: 1 dist: none index: 2 dist: none index: 3 dist: none index: 4 dist: none index: 5 dist: none index: 6 dist: none index: 7 dist: none index: 8 dist: none index: 9 dist: none left Connected to voxl-dfs-server index: 10 dist: none index: 11 dist: none index: 12 dist: none index: 13 dist: none index: 14 dist: none index: 15 dist: none index: 16 dist: none index: 17 dist: none index: 18 dist: none forward index: 19 dist: none index: 20 dist: none index: 21 dist: none index: 22 dist: none index: 23 dist: none index: 24 dist: none index: 25 dist: none index: 26 dist: none index: 27 dist: none right index: 28 dist: none index: 29 dist: none index: 30 dist: none index: 31 dist: none index: 32 dist: none index: 33 dist: none index: 34 dist: none index: 35 dist: none index: 36 dist: none Detected PX4 Mavlink SYSID 1 index: 0 dist: none back index: 1 dist: none index: 2 dist: none index: 3 dist: none index: 4 dist: none index: 5 dist: none index: 6 dist: none index: 7 dist: none index: 8 dist: none index: 9 dist: none left index: 10 dist: none index: 11 dist: none index: 12 dist: none index: 13 dist: none index: 14 dist: none index: 15 dist: none index: 16 dist: none index: 17 dist: none index: 18 dist: none forward index: 19 dist: none index: 20 dist: none index: 21 dist: none index: 22 dist: none index: 23 dist: none index: 24 dist: none index: 25 dist: none index: 26 dist: none index: 27 dist: none right index: 28 dist: none index: 29 dist: none index: 30 dist: none index: 31 dist: none index: 32 dist: none index: 33 dist: none index: 34 dist: none index: 35 dist: none index: 36 dist: none Connected to voxl-qvio-server updating to use imu: imu1 done updating transforms to use imu: imu1 Connected to TOF index: 0 dist: none back index: 1 dist: none index: 2 dist: none index: 3 dist: none index: 4 dist: none index: 5 dist: none index: 6 dist: none index: 7 dist: none index: 8 dist: none index: 9 dist: none left index: 10 dist: none index: 11 dist: none index: 12 dist: none index: 13 dist: none index: 14 dist: none index: 15 dist: none index: 16 dist: none index: 17 dist: none index: 18 dist: 1.05m forward index: 19 dist: 1.05m index: 20 dist: none index: 21 dist: none index: 22 dist: none index: 23 dist: none index: 24 dist: none index: 25 dist: none index: 26 dist: none index: 27 dist: none right index: 28 dist: none index: 29 dist: none index: 30 dist: none index: 31 dist: none index: 32 dist: none index: 33 dist: none index: 34 dist: none index: 35 dist: none index: 36 dist: none index: 0 dist: none back index: 1 dist: none index: 2 dist: none index: 3 dist: none index: 4 dist: none index: 5 dist: none index: 6 dist: none index: 7 dist: none index: 8 dist: none index: 9 dist: none left index: 10 dist: none index: 11 dist: none index: 12 dist: none index: 13 dist: none index: 14 dist: none index: 15 dist: none index: 16 dist: none index: 17 dist: none index: 18 dist: 1.05m forward index: 19 dist: 1.05m index: 20 dist: none index: 21 dist: none index: 22 dist: none index: 23 dist: none index: 24 dist: none index: 25 dist: none index: 26 dist: none index: 27 dist: none right index: 28 dist: none index: 29 dist: none index: 30 dist: none index: 31 dist: none index: 32 dist: none index: 33 dist: none index: 34 dist: none index: 35 dist: none index: 36 dist: none index: 0 dist: none back index: 1 dist: none index: 2 dist: none index: 3 dist: none index: 4 dist: none index: 5 dist: none index: 6 dist: none index: 7 dist: none index: 8 dist: none index: 9 dist: none left index: 10 dist: none index: 11 dist: none index: 12 dist: none index: 13 dist: none index: 14 dist: none index: 15 dist: none index: 16 dist: none index: 17 dist: none index: 18 dist: 1.05m forward index: 19 dist: 1.05m index: 20 dist: none index: 21 dist: none index: 22 dist: none index: 23 dist: none index: 24 dist: none index: 25 dist: none index: 26 dist: none index: 27 dist: none right index: 28 dist: none index: 29 dist: none index: 30 dist: none index: 31 dist: none index: 32 dist: none index: 33 dist: none index: 34 dist: none index: 35 dist: none index: 36 dist: none index: 0 dist: none back index: 1 dist: none index: 2 dist: none index: 3 dist: none index: 4 dist: none index: 5 dist: none index: 6 dist: none index: 7 dist: none index: 8 dist: none index: 9 dist: none left index: 10 dist: none index: 11 dist: none index: 12 dist: none index: 13 dist: none index: 14 dist: none index: 15 dist: none index: 16 dist: none index: 17 dist: none index: 18 dist: 1.05m forward index: 19 dist: 1.05m index: 20 dist: none index: 21 dist: none index: 22 dist: none index: 23 dist: none index: 24 dist: none index: 25 dist: none index: 26 dist: none index: 27 dist: none right index: 28 dist: none index: 29 dist: none index: 30 dist: none index: 31 dist: none index: 32 dist: none index: 33 dist: none index: 34 dist: none index: 35 dist: none index: 36 dist: none index: 0 dist: none back index: 1 dist: none index: 2 dist: none index: 3 dist: none index: 4 dist: none index: 5 dist: none index: 6 dist: none index: 7 dist: none index: 8 dist: none index: 9 dist: none left index: 10 dist: none index: 11 dist: none index: 12 dist: none index: 13 dist: 0.57m index: 14 dist: 0.53m index: 15 dist: 0.58m index: 16 dist: 0.95m index: 17 dist: none index: 18 dist: none forward index: 19 dist: none index: 20 dist: none index: 21 dist: 4.34m index: 22 dist: none index: 23 dist: none index: 24 dist: none index: 25 dist: none index: 26 dist: none index: 27 dist: none right index: 28 dist: none index: 29 dist: none index: 30 dist: none index: 31 dist: none index: 32 dist: none index: 33 dist: none index: 34 dist: none index: 35 dist: none index: 36 dist: none index: 0 dist: none back index: 1 dist: none index: 2 dist: none index: 3 dist: none index: 4 dist: none index: 5 dist: none index: 6 dist: none index: 7 dist: none index: 8 dist: none index: 9 dist: none left index: 10 dist: none index: 11 dist: none index: 12 dist: none index: 13 dist: 0.56m index: 14 dist: 0.53m index: 15 dist: 0.58m index: 16 dist: 0.95m index: 17 dist: none index: 18 dist: 5.12m forward index: 19 dist: 4.20m index: 20 dist: 4.10m index: 21 dist: 3.50m index: 22 dist: none index: 23 dist: none index: 24 dist: none index: 25 dist: none index: 26 dist: none index: 27 dist: none right index: 28 dist: none index: 29 dist: none index: 30 dist: none index: 31 dist: none index: 32 dist: none index: 33 dist: none index: 34 dist: none index: 35 dist: none index: 36 dist: none index: 0 dist: none back index: 1 dist: none index: 2 dist: none index: 3 dist: none index: 4 dist: none index: 5 dist: none index: 6 dist: none index: 7 dist: none index: 8 dist: none index: 9 dist: none left index: 10 dist: none index: 11 dist: none index: 12 dist: none index: 13 dist: 0.56m index: 14 dist: 0.52m index: 15 dist: 0.58m index: 16 dist: 0.96m index: 17 dist: none index: 18 dist: 5.12m forward index: 19 dist: 4.20m index: 20 dist: 4.10m index: 21 dist: 3.50m index: 22 dist: none index: 23 dist: none index: 24 dist: none index: 25 dist: none index: 26 dist: none index: 27 dist: none right index: 28 dist: none index: 29 dist: none index: 30 dist: none index: 31 dist: none index: 32 dist: none index: 33 dist: none index: 34 dist: none index: 35 dist: none index: 36 dist: none index: 0 dist: none back index: 1 dist: none index: 2 dist: none index: 3 dist: none index: 4 dist: none index: 5 dist: none index: 6 dist: none index: 7 dist: none index: 8 dist: none index: 9 dist: none left index: 10 dist: none index: 11 dist: none index: 12 dist: none index: 13 dist: 0.56m index: 14 dist: 0.52m index: 15 dist: 0.58m index: 16 dist: 0.96m index: 17 dist: none index: 18 dist: 5.12m forward index: 19 dist: 4.20m index: 20 dist: 4.10m index: 21 dist: 3.50m index: 22 dist: none index: 23 dist: none index: 24 dist: none index: 25 dist: none index: 26 dist: none index: 27 dist: none right index: 28 dist: none index: 29 dist: none index: 30 dist: none index: 31 dist: none index: 32 dist: none index: 33 dist: none index: 34 dist: none index: 35 dist: none index: 36 dist: none index: 0 dist: none back index: 1 dist: none index: 2 dist: none index: 3 dist: none index: 4 dist: none index: 5 dist: none index: 6 dist: none index: 7 dist: none index: 8 dist: none index: 9 dist: none left index: 10 dist: none index: 11 dist: none index: 12 dist: none index: 13 dist: 0.56m index: 14 dist: 0.53m index: 15 dist: 0.57m index: 16 dist: 0.96m index: 17 dist: none index: 18 dist: 5.12m forward index: 19 dist: 4.20m index: 20 dist: 4.10m index: 21 dist: 3.50m index: 22 dist: none index: 23 dist: none index: 24 dist: none index: 25 dist: none index: 26 dist: none index: 27 dist: none right index: 28 dist: none index: 29 dist: none index: 30 dist: none index: 31 dist: none index: 32 dist: none index: 33 dist: none index: 34 dist: none index: 35 dist: none index: 36 dist: noneEverything in voxl-portal is working fine.
I just cant seem to figure out why my VOA is not working during flight and continue to get the error in QGC. -
Could someone please help me?
I have tried the following;
*Re-flashed the voxl platform image 3.8.0-0.7
*Reset all PX4 parameters and reinstalled the EKF2 indoor vio parameters & Seeker v1 param rev A.
*Re-calibrated my stereo and tracking cameras.
*Re-calibrated imu0 and imu1.
*Re-configured the qvio-server.
*Re-configured extrinsics.
*Set the following parameters in PX4;
SYS_HAS_MAG 0
EKF2_MAG_TYPE 5 (none)
*enabled vio and voa in voxl px4 config files. Both are also setup to be sent to QGC.My dfs-server is running.
I have checked all cables and connections.
I have followed all the trouble shooting tips from ModalAi.
I have looked at tons of posts in the ModalAi forums on this issue, but most problems were due to dfs server not being enabled or mag issue or Odometry/NED X Y Z issues. I haven’t found a scenario like mine yet.I’m on the newest QGroundControl v4.2.3
ModalAi’s PX4 firmware version 1.11.3 with Custom Fw. Ver. 0.0.5
Collision Prevention is Enabled & Obstacle Avoidance is Disabled in PX4 Vehichle Setup Safety tab.Everything is working correctly as it should except my VOA.
Is there something I’ve missed?
I’m stumped… -
Hi,
So sorry for the delay in response,Can you show an image of the dfs-disparity debug image, this is what gets piped into the voa monitor, and seeing what your stereo cameras are seeing will allow us to see if the issue is a sensor one or an integration one.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login