Setting up micrortps bridge on VOXL2/Sentinel
-
Hi @jaredjohansen ,
You can, from the Ubuntu shell on VOXL2, run
px4-xxxcommands to invoke from command line (similar to voxl-px4-shell).If you disable the voxl-px4 service from running on bootup, and run it manually, you can get an interactive shell, see this section:

Page not found
ModalAI technical documentation for VOXL and VOXL 2 Companion Computers for PX4 and ArduPilot Obstacle Avoidance and GPS-denied navigation, assembled in the USA
ModalAI Technical Docs (docs.modalai.com)
-
Awesome. That is super helpful! I was able to follow those instructions and access the
pxh>shell.According to these instructions, if I have access to the NuttShell/System Console (
nsh>shell, I believe), I should be able to start themicrortps_clientrunning.Is there a way to access the
nsh>shell on the VOXL2?(For others, I'll note that the
nsh>shell is available on the VOXL1, which is nice to simulate things like the GPS signal being lost as described here.) -
@James-Strawson , I saw that you worked on the original voxl-px4-shell.
Do you know if there is a way to access the PX4's nuttx
nsh>shell on the VOXL2?(For ROS2 to communicate with the PX4 on the VOXL2 through the
micrortps_bridge, it is my understanding that I need to start themicrortps_clientvia the PX4 nuttx shell.) -
Hi @jaredjohansen ,
There's no nuttx on VOXL2, instead of the Nuttx RTOS, there's a QuRT RTOS instead. So the shell you get above is it...
For example
micrortps_clientwould need to be enabled in and more than likely ported to work on VOXL2: https://github.com/modalai/px4-firmware/tree/voxl-dev/src/modules/micrortps_bridgeSee this graphic for some help on orienting yourself:
https://docs.modalai.com/voxl-px4-developer-guide/#block-diagram---detailsThis is where we are excluding that driver at this time:
https://github.com/modalai/px4-firmware/blob/voxl-dev/boards/modalai/rb5-flight/default.cmake#L90I've not used micrortps in anyway, so info above is just about how one could try to enable the driver and begin looking at porting it (assuming you want it on the ubuntu core (apps_proc))
-
Hi @modaltb ,
I tried to build the voxl-px4 with the voxl-dev branch (which includes the micrortps_bridge).
- On an Ubuntu 20.04 machine, we followed the steps in VOXL 2 PX4 Build Guide to build the rb5-flight-px4-build-docker. This was successful.
- On the same machine, we
git clonedthe voxl-px4 repository andgit updatedthe submodules (of whichpx4-firmwareis one of them). - Inside of the
voxl-px4directory, we ran./run_docker.sh, which started the docker container and gave us a shell inside the docker container (at/usr/local/workspace). - Inside of the docker, at
/usr/local/workspace, we installed fastrtpsgen (i.e., Fast-DDS, Fast-DDS-python, Fast-DDS-Gen). - We then ran the following commands:
git clone px4-firmware cd px4-firmware git checkout voxl-dev git submodule update --init --recursive vi px4-firmware/board/modalai/rb5-flight/default.cmake # Uncomment the micrortps_bridge at line 90 # save and exit cd /usr/local/workspace source /home/build-env.sh ./clean.sh ./build.shThis last step failed with two errors:
ERROR #1
-- fastrtpsgen version 1.0.4 Traceback (most recent call last): File "/usr/local/workspace/px4-firmware/msg/tools/uorb_rtps_classifier.py", line 233, in <module> else Classifier(os.path.join(msg_dir, args.yaml_file), msg_dir)) File "/usr/local/workspace/px4-firmware/msg/tools/uorb_rtps_classifier.py", line 55, in __init__ self.check_if_listed(yaml_file) File "/usr/local/workspace/px4-firmware/msg/tools/uorb_rtps_classifier.py", line 139, in check_if_listed raise AssertionError( AssertionError: The following messages are not listen under /usr/local/workspace/px4-firmware/msg/tools/uorb_rtps_message_ids.yaml: imu_server, parameter_server_set_used_request, parameter_server_set_used_response, parameter_client_reset_response, mavlink, parameter_client_set_value_response, parameter_server_set_value_request, parameter_server_set_value_response, parameter_client_reset_request, parameter_client_set_value_request Please add them to the yaml file with the respective ID and, if applicable, mark them to be sent or received by the micro-RTPS bridge. NOTE: If the message has multi-topics (#TOPICS), these should be added as well. CMake Error at src/modules/micrortps_bridge/CMakeLists.txt:58 (string): string sub-command FIND requires 3 or 4 parameters. Traceback (most recent call last): File "/usr/local/workspace/px4-firmware/msg/tools/uorb_rtps_classifier.py", line 233, in <module> else Classifier(os.path.join(msg_dir, args.yaml_file), msg_dir)) File "/usr/local/workspace/px4-firmware/msg/tools/uorb_rtps_classifier.py", line 55, in __init__ self.check_if_listed(yaml_file) File "/usr/local/workspace/px4-firmware/msg/tools/uorb_rtps_classifier.py", line 139, in check_if_listed raise AssertionError( AssertionError: The following messages are not listen under /usr/local/workspace/px4-firmware/msg/tools/uorb_rtps_message_ids.yaml: imu_server, parameter_server_set_used_request, parameter_server_set_used_response, parameter_client_reset_response, mavlink, parameter_client_set_value_response, parameter_server_set_value_request, parameter_server_set_value_response, parameter_client_reset_request, parameter_client_set_value_request Please add them to the yaml file with the respective ID and, if applicable, mark them to be sent or received by the micro-RTPS bridge. NOTE: If the message has multi-topics (#TOPICS), these should be added as well. CMake Error at src/modules/micrortps_bridge/CMakeLists.txt:74 (string): string sub-command FIND requires 3 or 4 parameters.We checked the uorb_rtps_message_ids.yaml which specifies the message’s id. It doesn't have the messages described in the error line. Can you help us whether we should add these message_ids to the file (or remove them from elsewhere)?
ERROR #2
[ 45%] Built target rc make[3]: Entering directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default' Scanning dependencies of target lib__rc__rc_tests make[3]: Leaving directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default' make[3]: Entering directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default' [ 45%] Building CXX object src/lib/rc/rc_tests/CMakeFiles/lib__rc__rc_tests.dir/RCTest.cpp.o /usr/local/workspace/px4-firmware/src/lib/rc/rc_tests/RCTest.cpp: In member function ‘bool RCTest::crsfTest()’: /usr/local/workspace/px4-firmware/src/lib/rc/rc_tests/RCTest.cpp:96:88: error: too few arguments to function ‘uint32_t crsf_parse(uint64_t, const uint8_t*, unsigned int, uint16_t*, uint16_t*, uint16_t, uint8_t*, uint8_t*)’ 96 | bool result = crsf_parse(now, frame, frame_len, rc_values, &num_values, max_channels); | ^ compilation terminated due to -Wfatal-errors. make[3]: *** [src/lib/rc/rc_tests/CMakeFiles/lib__rc__rc_tests.dir/build.make:63: src/lib/rc/rc_tests/CMakeFiles/lib__rc__rc_tests.dir/RCTest.cpp.o] Error 1 make[3]: Leaving directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default' make[2]: *** [CMakeFiles/Makefile2:8186: src/lib/rc/rc_tests/CMakeFiles/lib__rc__rc_tests.dir/all] Error 2 make[2]: Leaving directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default' make[1]: *** [Makefile:152: all] Error 2 make[1]: Leaving directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default' make: *** [Makefile:222: modalai_rb5-flight_default] Error 2We checked the crsf_parse and it requires two additional arguments, leading us to believe that we have mismatched code versions. Can you help us know whether this is true (and if so, how we can bring all the SW versions into sync)?
For reference, the complete log from running
build.shcan be found here -
Hi @modaltb ,
I tried to build the voxl-px4 with the voxl-dev branch (which includes the micrortps_bridge).
- On an Ubuntu 20.04 machine, we followed the steps in VOXL 2 PX4 Build Guide to build the rb5-flight-px4-build-docker. This was successful.
- On the same machine, we
git clonedthe voxl-px4 repository andgit updatedthe submodules (of whichpx4-firmwareis one of them). - Inside of the
voxl-px4directory, we ran./run_docker.sh, which started the docker container and gave us a shell inside the docker container (at/usr/local/workspace). - Inside of the docker, at
/usr/local/workspace, we installed fastrtpsgen (i.e., Fast-DDS, Fast-DDS-python, Fast-DDS-Gen). - We then ran the following commands:
git clone px4-firmware cd px4-firmware git checkout voxl-dev git submodule update --init --recursive vi px4-firmware/board/modalai/rb5-flight/default.cmake # Uncomment the micrortps_bridge at line 90 # save and exit cd /usr/local/workspace source /home/build-env.sh ./clean.sh ./build.shThis last step failed with two errors:
ERROR #1
-- fastrtpsgen version 1.0.4 Traceback (most recent call last): File "/usr/local/workspace/px4-firmware/msg/tools/uorb_rtps_classifier.py", line 233, in <module> else Classifier(os.path.join(msg_dir, args.yaml_file), msg_dir)) File "/usr/local/workspace/px4-firmware/msg/tools/uorb_rtps_classifier.py", line 55, in __init__ self.check_if_listed(yaml_file) File "/usr/local/workspace/px4-firmware/msg/tools/uorb_rtps_classifier.py", line 139, in check_if_listed raise AssertionError( AssertionError: The following messages are not listen under /usr/local/workspace/px4-firmware/msg/tools/uorb_rtps_message_ids.yaml: imu_server, parameter_server_set_used_request, parameter_server_set_used_response, parameter_client_reset_response, mavlink, parameter_client_set_value_response, parameter_server_set_value_request, parameter_server_set_value_response, parameter_client_reset_request, parameter_client_set_value_request Please add them to the yaml file with the respective ID and, if applicable, mark them to be sent or received by the micro-RTPS bridge. NOTE: If the message has multi-topics (#TOPICS), these should be added as well. CMake Error at src/modules/micrortps_bridge/CMakeLists.txt:58 (string): string sub-command FIND requires 3 or 4 parameters. Traceback (most recent call last): File "/usr/local/workspace/px4-firmware/msg/tools/uorb_rtps_classifier.py", line 233, in <module> else Classifier(os.path.join(msg_dir, args.yaml_file), msg_dir)) File "/usr/local/workspace/px4-firmware/msg/tools/uorb_rtps_classifier.py", line 55, in __init__ self.check_if_listed(yaml_file) File "/usr/local/workspace/px4-firmware/msg/tools/uorb_rtps_classifier.py", line 139, in check_if_listed raise AssertionError( AssertionError: The following messages are not listen under /usr/local/workspace/px4-firmware/msg/tools/uorb_rtps_message_ids.yaml: imu_server, parameter_server_set_used_request, parameter_server_set_used_response, parameter_client_reset_response, mavlink, parameter_client_set_value_response, parameter_server_set_value_request, parameter_server_set_value_response, parameter_client_reset_request, parameter_client_set_value_request Please add them to the yaml file with the respective ID and, if applicable, mark them to be sent or received by the micro-RTPS bridge. NOTE: If the message has multi-topics (#TOPICS), these should be added as well. CMake Error at src/modules/micrortps_bridge/CMakeLists.txt:74 (string): string sub-command FIND requires 3 or 4 parameters.We checked the uorb_rtps_message_ids.yaml which specifies the message’s id. It doesn't have the messages described in the error line. Can you help us whether we should add these message_ids to the file (or remove them from elsewhere)?
ERROR #2
[ 45%] Built target rc make[3]: Entering directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default' Scanning dependencies of target lib__rc__rc_tests make[3]: Leaving directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default' make[3]: Entering directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default' [ 45%] Building CXX object src/lib/rc/rc_tests/CMakeFiles/lib__rc__rc_tests.dir/RCTest.cpp.o /usr/local/workspace/px4-firmware/src/lib/rc/rc_tests/RCTest.cpp: In member function ‘bool RCTest::crsfTest()’: /usr/local/workspace/px4-firmware/src/lib/rc/rc_tests/RCTest.cpp:96:88: error: too few arguments to function ‘uint32_t crsf_parse(uint64_t, const uint8_t*, unsigned int, uint16_t*, uint16_t*, uint16_t, uint8_t*, uint8_t*)’ 96 | bool result = crsf_parse(now, frame, frame_len, rc_values, &num_values, max_channels); | ^ compilation terminated due to -Wfatal-errors. make[3]: *** [src/lib/rc/rc_tests/CMakeFiles/lib__rc__rc_tests.dir/build.make:63: src/lib/rc/rc_tests/CMakeFiles/lib__rc__rc_tests.dir/RCTest.cpp.o] Error 1 make[3]: Leaving directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default' make[2]: *** [CMakeFiles/Makefile2:8186: src/lib/rc/rc_tests/CMakeFiles/lib__rc__rc_tests.dir/all] Error 2 make[2]: Leaving directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default' make[1]: *** [Makefile:152: all] Error 2 make[1]: Leaving directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default' make: *** [Makefile:222: modalai_rb5-flight_default] Error 2We checked the crsf_parse and it requires two additional arguments, leading us to believe that we have mismatched code versions. Can you help us know whether this is true (and if so, how we can bring all the SW versions into sync)?
For reference, the complete log from running
build.shcan be found here@Kyungtaek-Oh-0 First of all, https://docs.modalai.com/voxl2-px4-build-guide/ is not completely correct so sorry about that. We will update that today. But basically you need to prepare the Docker image which it looks like you did successfully. Then you need to build the PX4 code with these instructions: https://gitlab.com/voxl-public/voxl-sdk/services/voxl-px4/-/blob/dev/README.md. If you don't make any changes to default.cmake does that work for you?
-
Thank you @Eric-Katzfey! That sound's great!
When I changed nothing including "default.cmake", it worked for me and it could run on voxl2.
The error only occurred when changing default.cmake line 90. -
Thank you @Eric-Katzfey! That sound's great!
When I changed nothing including "default.cmake", it worked for me and it could run on voxl2.
The error only occurred when changing default.cmake line 90.@Kyungtaek-Oh-0 Okay, that's not something any of us has tried yet.
-
Hi @Eric-Katzfey,
We had some finds.
Here's what we've understood so far:- Two things are needed to make a voxl-px4 package using px4-firmware(voxl-dev)
modalai_rb5-flight_defaultmodalai_rb5-flight_qurt
- And each one needs the following different crsf_parse function
modalai_rb5-flight_defaultneedscrsf_parse(6 arguments)modalai_rb5-flight_qrutneedscrsf_parse(8 arguments)
- Each px4-firmware has a different version of
crsf_parse- Branch: main has
crsf_parse(6 arguments) - Branch: voxl-dev has
crsf_parse(8 arguments)
- Branch: main has
Our goal was to build the voxl-px4 included MicroRTPS_bridge in px4-firmware(branch: voxl-dev), so we added the following two functions to crsf.cpp in px4-firmware.
bool crsf_parse_buffer(uint16_t *values, uint16_t *num_values, uint16_t max_channels)- as
crsf_parse_buffer_6
- as
bool crsf_parse(const uint64_t now, const uint8_t *frame, unsigned len, uint16_t *values, uint16_t *num_values, uint16_t max_channels)- as
crsf_parse_6
- as
Then the build progressed to 89% and stopped with an error below.
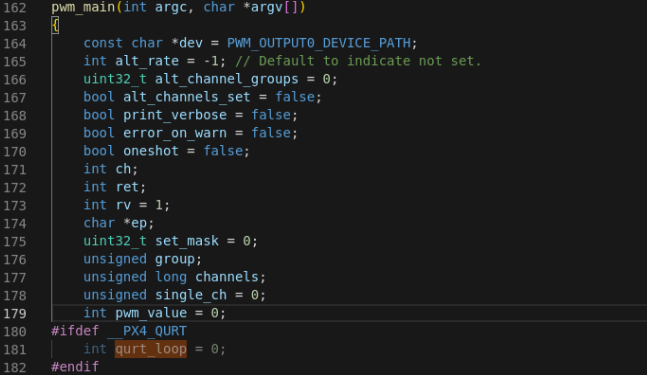
ERROR #1[ 89%] Building CXX object src/systemcmds/pwm/CMakeFiles/systemcmds__pwm.dir/pwm.cpp.o /usr/local/workspace/px4-firmware/src/systemcmds/pwm/pwm.cpp: In function 'int pwm_main(int, char**)': /usr/local/workspace/px4-firmware/src/systemcmds/pwm/pwm.cpp:810:3: error: 'qurt_loop' was not declared in this scope 810 | qurt_loop = 320; | ^~~~~~~~~ compilation terminated due to -Wfatal-errors. make[3]: *** [src/systemcmds/pwm/CMakeFiles/systemcmds__pwm.dir/build.make:63: src/systemcmds/pwm/CMakeFiles/systemcmds__pwm.dir/pwm.cpp.o] Error 1 make[3]: Leaving directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default' make[2]: *** [CMakeFiles/Makefile2:12085: src/systemcmds/pwm/CMakeFiles/systemcmds__pwm.dir/all] Error 2 make[2]: Leaving directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default' make[1]: *** [Makefile:152: all] Error 2 make[1]: Leaving directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default' make: *** [Makefile:222: modalai_rb5-flight_default] Error 2We changed the
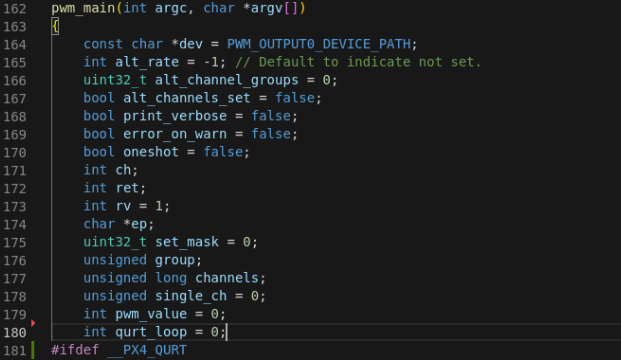
int qurt_loopvariable's scope to like this.- Before
- After
After that, an error occurred for the label for jump, and it was resolved by changing it as follows.
ERROR #2[ 89%] Building CXX object src/systemcmds/pwm/CMakeFiles/systemcmds__pwm.dir/pwm.cpp.o /usr/local/workspace/px4-firmware/src/systemcmds/pwm/pwm.cpp: In function 'int pwm_main(int, char**)': /usr/local/workspace/px4-firmware/src/systemcmds/pwm/pwm.cpp:864:1: error: jump to label 'err_out_no_test_2' 864 | err_out_no_test_2: | ^~~~~~~~~~~~~~~~~ compilation terminated due to -Wfatal-errors. make[3]: *** [src/systemcmds/pwm/CMakeFiles/systemcmds__pwm.dir/build.make:63: src/systemcmds/pwm/CMakeFiles/systemcmds__pwm.dir/pwm.cpp.o] Error 1 make[3]: Leaving directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default' make[2]: *** [CMakeFiles/Makefile2:12085: src/systemcmds/pwm/CMakeFiles/systemcmds__pwm.dir/all] Error 2 make[2]: Leaving directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default' make[1]: *** [Makefile:152: all] Error 2 make[1]: Leaving directory '/usr/local/workspace/px4-firmware/build/modalai_rb5-flight_default'So we changed the
gotocommand to "return 0" instead of usingerr_out_no_test_2label.After that, the
build.shworked and themake_packages.shalso worked.(in thevoxl-px4)
However, it did not run with the following error on voxl2.
ERROR #3voxl2:~$ voxl-px4 Found DSP signature file /usr/bin/voxl-px4: line 42: /usr/bin/px4: cannot execute binary file: Exec format errorBased on the above results, we think the voxl-px4 with microRTPS_bridge can be built by changing
modalai_rb5-flight_defaultandmodalai_rb5-flight_qurtto use the samecrsf_parse.So if you think our thinking is correct, can you give us some guidance?
If it is not possible in px4-firmware(branch: voxl-dev), can we build voxl-px4(included micrortps_bridge) using another branch?
Any advice would be appreciated. - Two things are needed to make a voxl-px4 package using px4-firmware(voxl-dev)
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login