RB5 not detected by QGroundControl
-
Hello everyone,
We have faced an issue when attempting to connect the RB5 to the control software QGC. After following all the steps described in the user manual, the Linux system is able to connect via ADB to the drone, also the device has network connection via 5G modem.
Despite all of this when we open the QGC it shows that there is no connection between this sw and the drone. It seems that the drone is not detected via serial connection or network connection.
What should we do to solve this problem and make possible to use QGC?
Thanks in advance for your help. -
@Alejandro-M It is not possible to connect an RB5 to QGC via. serial like it is on our Flight Core.
You can connect to QGC via. two different network options:
- WiFi
- 5G + VPN
We've recently released VOXL SDK support for RB5, I would highly recommend upgrading your software to this release by following the instructions here: https://docs.modalai.com/Qualcomm-Flight-RB5-voxl-sdk-upgrade-guide/
or if you prefer video form:
https://www.youtube.com/watch?v=SGflQpCfsZsOnce you've done that you can proceed to connecting to QGC.
In order to do this over WiFi, you can use either SoftAP mode (using drone as WiFi host) or Station mode (connecting to your local WiFi network, e.g home network or office network). To do this you can use the
voxl-wifitool.for station:
voxl-wifi station SSID PASS
for softap:voxl-wifi softap SSIDYou can than connect your ground control station (laptop, pc, tablet) by following the instructions here: https://docs.modalai.com/seeker-user-guide-network/ (Sentinel instructions bubt workflow is the same if you're running VOXL SDK)
If you would like to connect over 5G, you'll have to use a VPN as by default the IP given on your 5G network is private and not exposed publically, see doc here: https://docs.modalai.com/Qualcomm-Flight-RB5-user-guide-connect-gcs/#connecting-to-qgc-over-5g
-
Hi @tom, thanks for your answer.
We have tried to update VOXL SDK as you commented. We used for this a Ubuntu 20.04 virtual machine to operate the flash process. During the fastboot reboot, the flash process was interrupted somehow and now we are not able to use ADB over the device or start the flash process again.
The device administrator shows the rb5 connection like this:

Do you know how we should proceed in order to restart the system? Thanks in advance.
-
@Alejandro-M Here is a link to our "unbricking" process: https://docs.modalai.com/Qualcomm-Flight-RB5-QDL/
Hello @tom.
We have followed the steps for unbricking the device.
First, with QDL the drone was reseted to a factory image.
Second, RB5 System Image 1.0.5-M0052-9.1-perf was installed.
After this, RB5 SDK rb5-flight-sdk-1.1.3 was installed.After this the drone seemed to be fixed and working again, but we have found that when enabling PX4 service the drone reboot itself into QUSB_BULK_SN as before the restoration.

If we execute
systemctl disable rb5-px4-startthe drone is stable and does not reboot. Also what we get fromm0052-px4is the following:
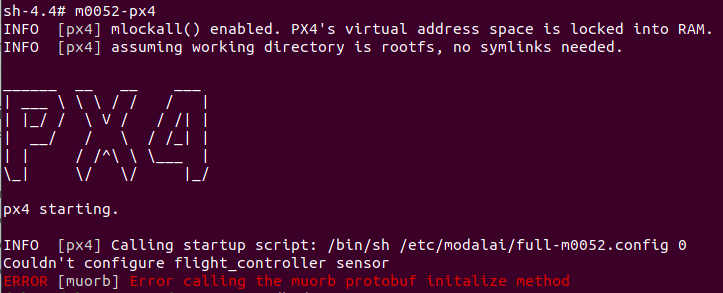
Can you help us to find out how to solve this issue? Thanks in advance for your help.
-
Hi @tom,
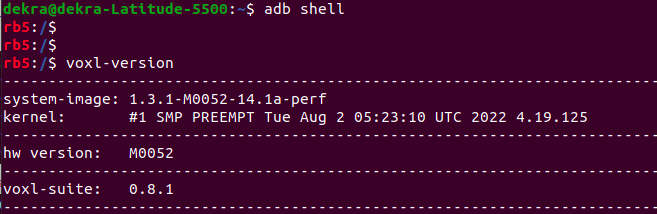
Thanks for your support. Our Flight RB5 is now updated to VOXL as you recommended.
We have observed that PX4 commands for checking that the drone is functional are no longer working:
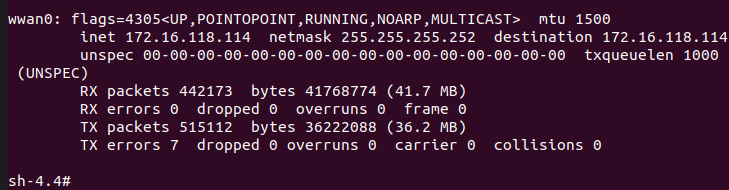
systemctl status rb5-px4-start. However the blue LEDs are blinking, so can we asume that the system is working properly and it is ready to connect with QGC?On the other hand, we are finding difficulties to establish the VPN connection following this guide https://docs.modalai.com/Qualcomm-Flight-RB5-user-guide-connect-gcs/#connecting-to-qgc-over-5g. Our OpenVPN is active but when we try to connect the dron's client it, we receive the following response:
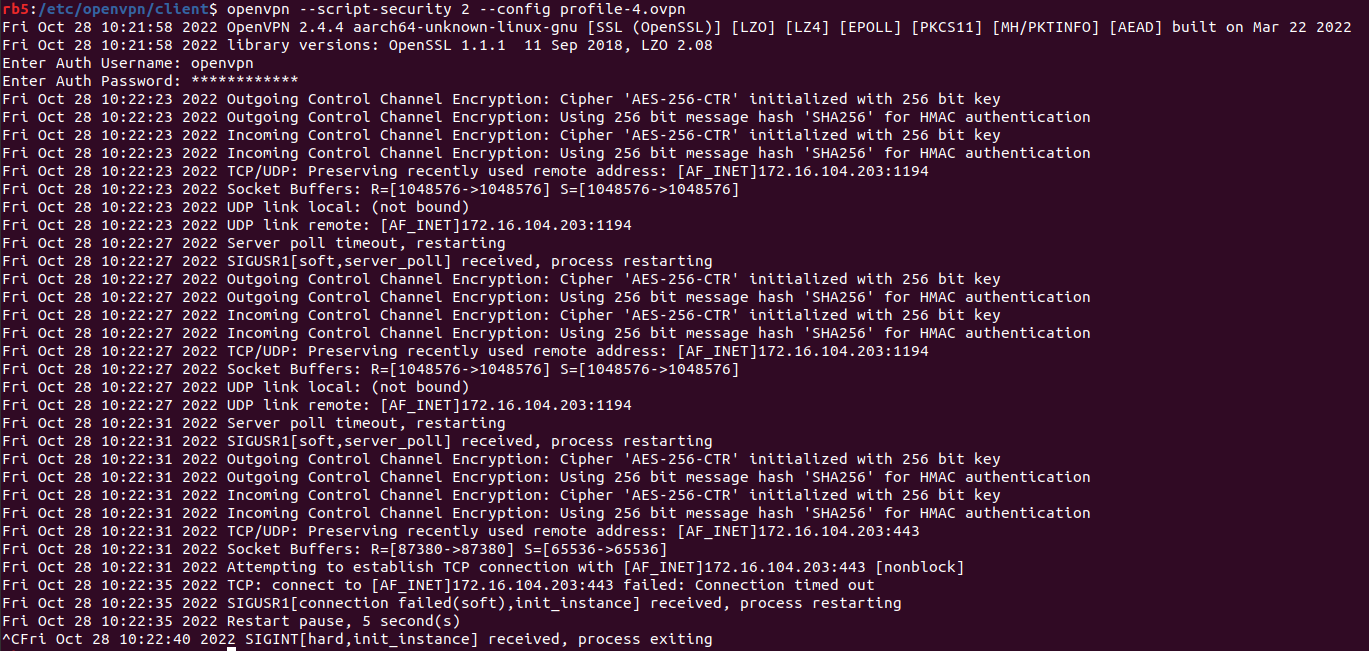
Do you know what could be missed in order to make the client connect to the server?Again, thanks a lot for your help and your time.
-
@Alejandro-M Also to address your first question, now that you're on VOXL SDK, none of the
rb5-*commands will be used anymore and you can refer to the VOXL SDK docs for info: https://docs.modalai.com/voxl-sdk/A good way to see status is with
systemctl status voxl-vision-px4Also make sure you have enabled
systemctl enable voxl-mavlink-server -
@Alejandro-M Also to address your first question, now that you're on VOXL SDK, none of the
rb5-*commands will be used anymore and you can refer to the VOXL SDK docs for info: https://docs.modalai.com/voxl-sdk/A good way to see status is with
systemctl status voxl-vision-px4Also make sure you have enabled
systemctl enable voxl-mavlink-serverHi @tom,
Firstly, thank you for recommending the tailscale solution for connecting using a VPN. This way we were able to establish connection between QGC and the RB5. Also, the guide for VOXL was helpful too.
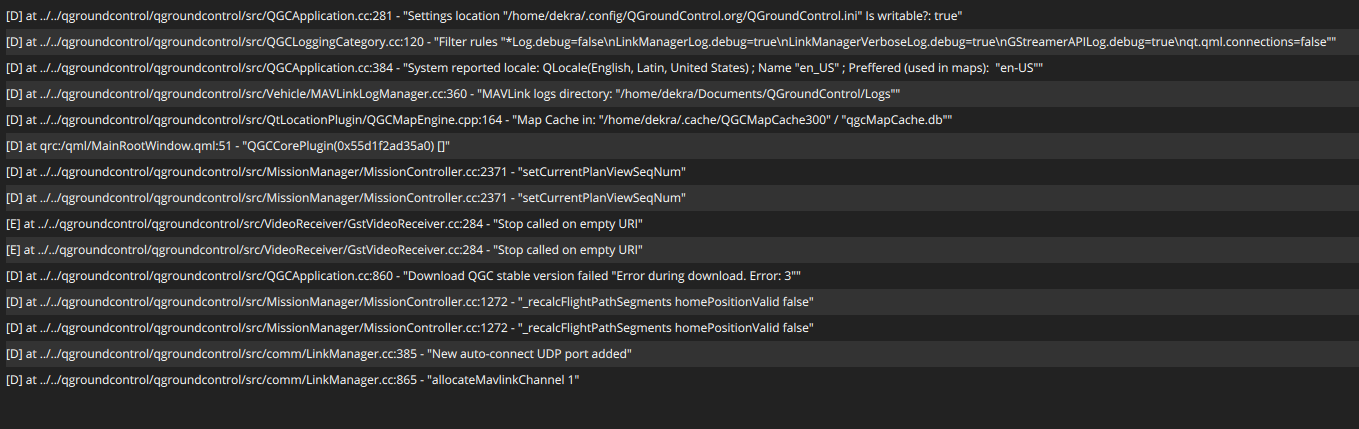
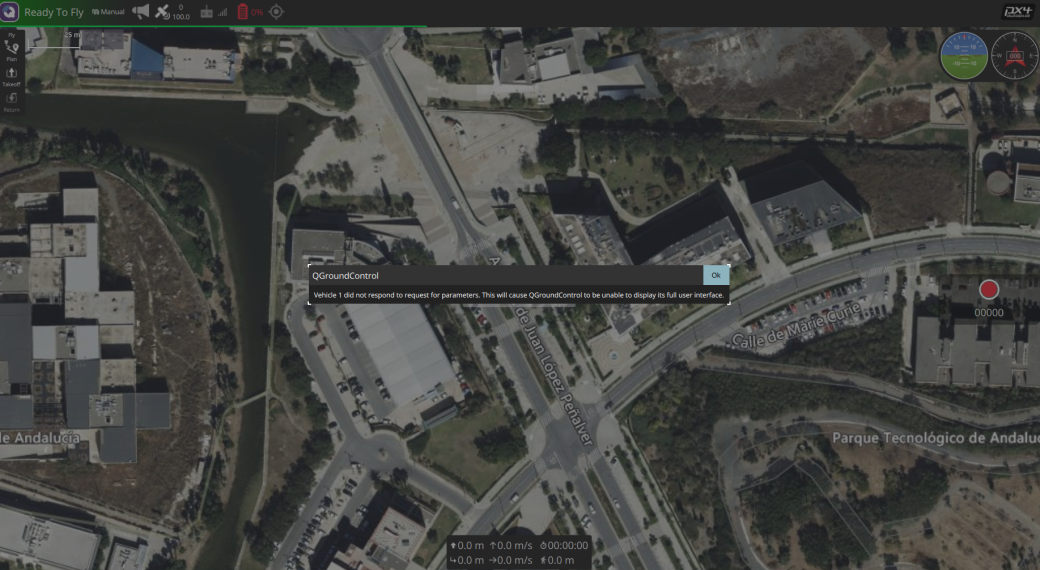
However, we would like to ask for your help since after QGC connects with the RB5 the following error is received:
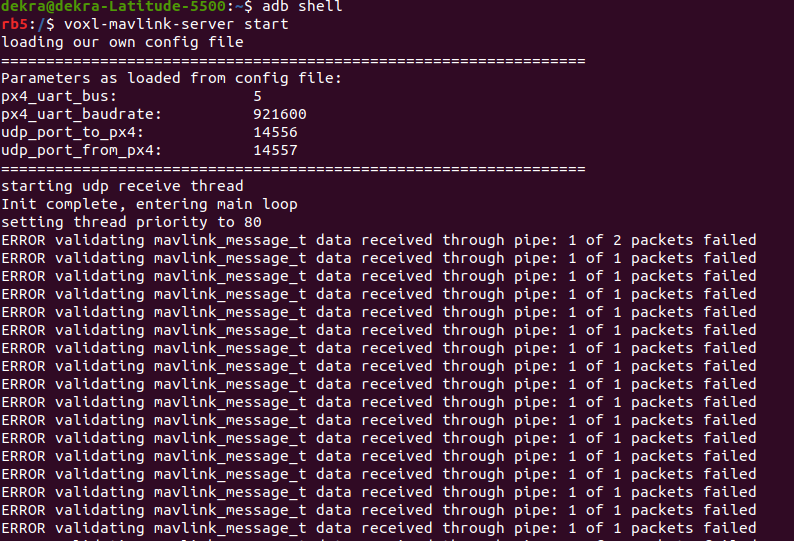
On the RB5 side the error is the following:
Do you know what could be wrong?
Thanks in advance for your help.
-
@Alejandro-M Do you have the
voxl-mavlink-serversysytemd service enabled and running? I see you're running it from the command line, just wondering if it's getting ran twice.Hi @tom, thank you very much for your responses and support. We managed to finish the Qualcomm RB5 Drone configuration properly. The drone is now ready to fly apparently but we were wondering whether it is possible to get any guide or help in order to prepare a flight with the drone.
Thank you again and we are looking forward to you reply. -
Hi @tom, thank you very much for your responses and support. We managed to finish the Qualcomm RB5 Drone configuration properly. The drone is now ready to fly apparently but we were wondering whether it is possible to get any guide or help in order to prepare a flight with the drone.
Thank you again and we are looking forward to you reply. -
Hi @tom, thank you very much for your responses and support. We managed to finish the Qualcomm RB5 Drone configuration properly. The drone is now ready to fly apparently but we were wondering whether it is possible to get any guide or help in order to prepare a flight with the drone.
Thank you again and we are looking forward to you reply.@Alejandro-M
I documented the steps I took to get my RB5 drone from out of the box to flying programmatically with MAVROS. It includes intermediate steps such as wifi and QGround control setup.
Build software better, together
GitHub is where people build software. More than 150 million people use GitHub to discover, fork, and contribute to over 420 million projects.

GitHub (github.com)
-
M Martin Brandt referenced this topic on
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login