Heavy drift on VOXL 2
-
Hello,
I am encountering a heavy drift problem on my drone running VOXL 2 with VOXL 2 4-in-1 mini ESC. It drifts when it is set to position hold. We were thinking that this is because of vibrations, but then i saw some flight logs of other drones with similar vibrations that didn't seem to have this issue. I have between 2-4m/s^2 vibrations, and i'm wondering if this is "common" for VOXL based drones to drift like this (we're talking 50cm in different directions trying to hold a position), with the vibration numbers i'm getting. Maybe it's something else that causes the drift?
Thanks
-
@nikolahm is your drone PID tuned? How are you flying in position mode? GPS based flight, VIO based flight, etc. What is the environment you are testing in, can you paste a log in here please?
-
Hei there, I'm from the same team as @nikolahm
I've been investigating this issue for more then two month now. We are testing inside a motion capture system, closed hall, enough distance to ground and other object to not induce aerodynamical effects. We use a Qualysis system with 150hz update rate and an average tracking precision of ~0.5mm. The drone has been PID tuned. Attitude control works flawless.I've seen this behaviour across different voxl2 based drones I've tested: https://youtube.com/shorts/URm6XqTt3CM?feature=share
All fly solid in attitude control. Also i tried manually tuning the Velocity and Position controller, without any improvement. LP-Filtering also yields no improvement.I'm certain the issue lies in the velocity estimate that gets fused into px4s EKF. Hence the issue is most sensitive to linear acceleration.
A Flight log from testing.Correct me if i get this wrong, but my assumption that the fluctuation in cycle update time - as shown in the following fig - plus noisy linear acceleration seems to cause wrong velocity estimation scince px4 assumes equally spaced samples, which is not always the case.
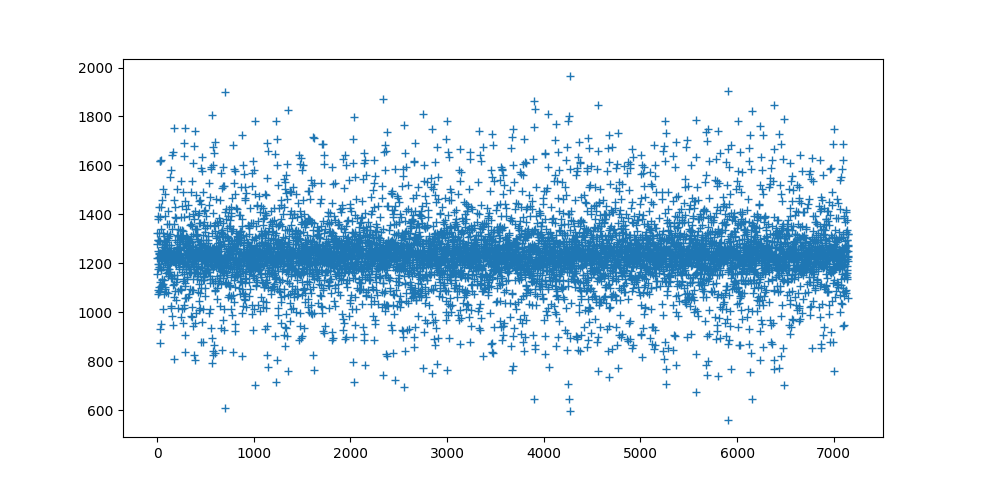
y-axis = micro seconds to previous update
x-axis = update cycle countThe fact that classical stm32 based flightcontroller with the same IMU handle these vibration significantlly better on similar drones leads me to the conclusion that it might be due the different way the voxl handles the data. - cycle time fluctuation.
-
Hei there, I'm from the same team as @nikolahm
I've been investigating this issue for more then two month now. We are testing inside a motion capture system, closed hall, enough distance to ground and other object to not induce aerodynamical effects. We use a Qualysis system with 150hz update rate and an average tracking precision of ~0.5mm. The drone has been PID tuned. Attitude control works flawless.I've seen this behaviour across different voxl2 based drones I've tested: https://youtube.com/shorts/URm6XqTt3CM?feature=share
All fly solid in attitude control. Also i tried manually tuning the Velocity and Position controller, without any improvement. LP-Filtering also yields no improvement.I'm certain the issue lies in the velocity estimate that gets fused into px4s EKF. Hence the issue is most sensitive to linear acceleration.
A Flight log from testing.Correct me if i get this wrong, but my assumption that the fluctuation in cycle update time - as shown in the following fig - plus noisy linear acceleration seems to cause wrong velocity estimation scince px4 assumes equally spaced samples, which is not always the case.
y-axis = micro seconds to previous update
x-axis = update cycle countThe fact that classical stm32 based flightcontroller with the same IMU handle these vibration significantlly better on similar drones leads me to the conclusion that it might be due the different way the voxl handles the data. - cycle time fluctuation.
@astro_phil what do you mean by position control? How are you achieving your position estimate? If it's VIO, we achieve <1cm drift in position hold on our drone platforms

VIO
ModalAI technical documentation for VOXL and VOXL 2 Companion Computers for PX4 and ArduPilot Obstacle Avoidance and GPS-denied navigation, assembled in the USA
ModalAI Technical Docs (docs.modalai.com)
-
@astro_phil what do you mean by position control? How are you achieving your position estimate? If it's VIO, we achieve <1cm drift in position hold on our drone platforms
VIO
ModalAI technical documentation for VOXL and VOXL 2 Companion Computers for PX4 and ArduPilot Obstacle Avoidance and GPS-denied navigation, assembled in the USA
ModalAI Technical Docs (docs.modalai.com)
as written above we use a Qualysis system as external VIO. Which is calibrated and achieves a precision of sub 1mm. With all none voxel based drones it does work without any issue, even when vibration are present we achieve tracking errors with position hold of ~1cm. Only the voxl based drones have a hard time. PX4's position estimate align closely with the VIO but velocity estimate randomly spikes in arbitrary directions.
-
as written above we use a Qualysis system as external VIO. Which is calibrated and achieves a precision of sub 1mm. With all none voxel based drones it does work without any issue, even when vibration are present we achieve tracking errors with position hold of ~1cm. Only the voxl based drones have a hard time. PX4's position estimate align closely with the VIO but velocity estimate randomly spikes in arbitrary directions.
@astro_phil with some further investigation over the weekend, i found a small fix in the px4 codebase that seems to reduce the velocity estimation error. I low pass filtered the delta time (dt) value that is used to integrate the linear acceleration to obtain the velocity estimate.
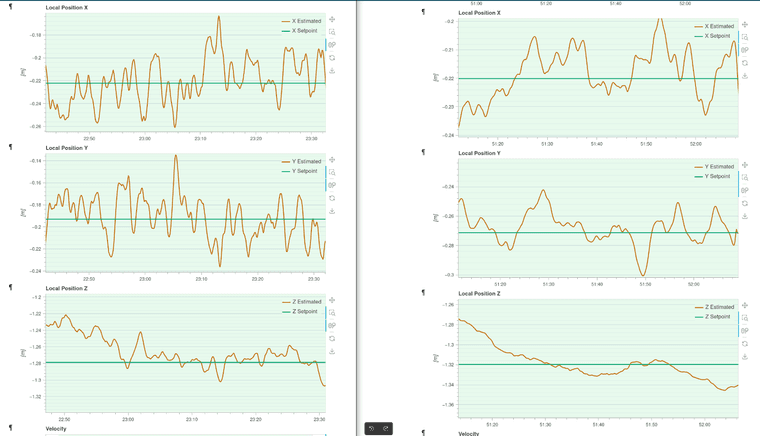
Left is without the "fix" and right is with the "fix". Flying in position hold.
I tried to induce more vibration on purpose to test the impact on position tracking.
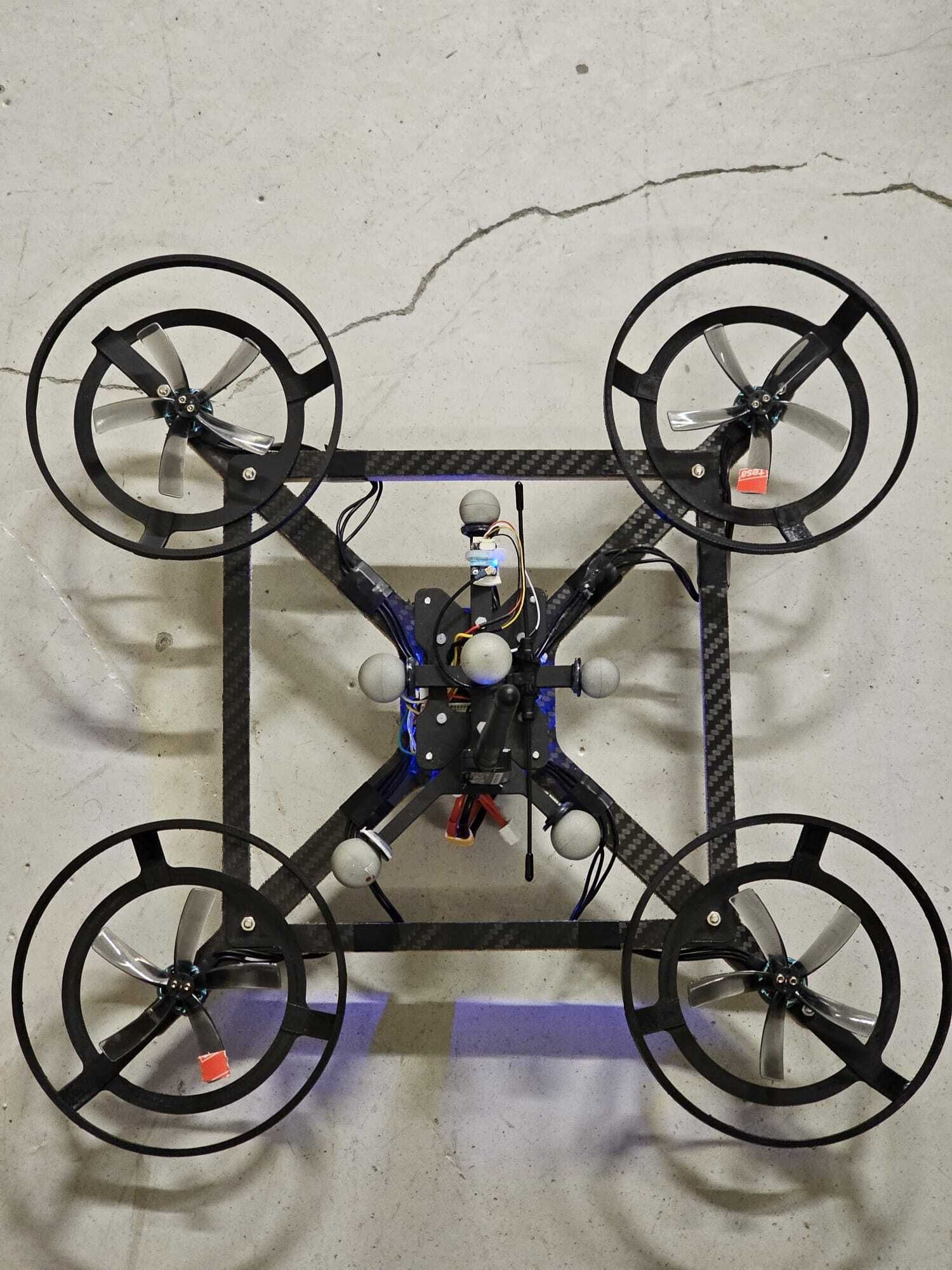
Both flights shown in the plot where done with the system shown in the picture.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login