ROS2 VOXL2 Deserialization Errors
-
Hello,
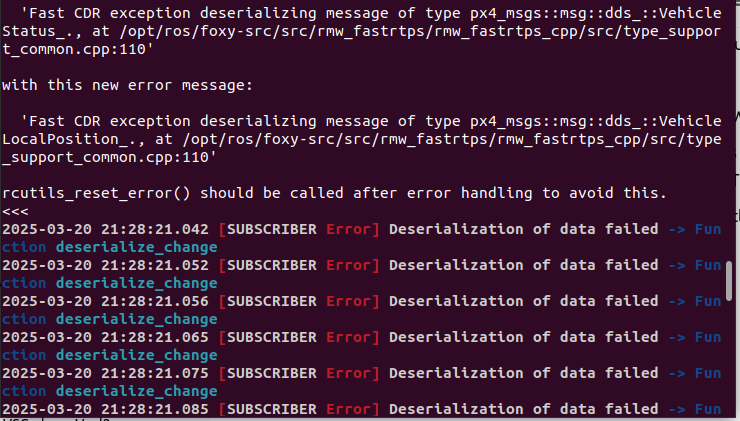
I'm in the process of trying to run a sample Python program from the PX4 website that allows my Starling drone to enter offboard mode, arm, fly to a specific height, and wait. However, when going to run my program, I experience deserialization errors. I suspect this is due to different definitions involving messages between the subscribers and publishers, but I'm not 100% sure. Would anyone know anything about resolving these specific errors?
-
@GlennTee it looks like the version of px4 messages that was downloaded and built for the dds mismatches what px4 uorb messages are running in the system. I will take a look into this. Thanks!
-
@GlennTee it looks like the version of px4 messages that was downloaded and built for the dds mismatches what px4 uorb messages are running in the system. I will take a look into this. Thanks!
@Zachary-Lowell-0 Thank you. I just tried using a different SDK version (1.1.2) instead of the one I was originally using (1.1.4) just to see if that would help, but I am still experiencing the same errors. My guess right now is that it is a problem with message definitions within the repository itself.
-
@GlennTee it looks like the version of px4 messages that was downloaded and built for the dds mismatches what px4 uorb messages are running in the system. I will take a look into this. Thanks!
Hi @Zachary-Lowell-0 I'm working with @GlennTee on his capstone project as an advisor. We are hoping to use Starlings as infrastructure for algorithm research and development in our labs. In order to sell the idea to our sponsors we'll need basic (working) examples for researchers to get started with that don't require weeks of work to sort through just to establish a baseline. I've seen other posts with similar deserialization errors so I'm hoping that you can help to resolve this easily. We very much appreciate your help and eagerly await direction.
Best Regards,
Bill -
Hi @Zachary-Lowell-0 I'm working with @GlennTee on his capstone project as an advisor. We are hoping to use Starlings as infrastructure for algorithm research and development in our labs. In order to sell the idea to our sponsors we'll need basic (working) examples for researchers to get started with that don't require weeks of work to sort through just to establish a baseline. I've seen other posts with similar deserialization errors so I'm hoping that you can help to resolve this easily. We very much appreciate your help and eagerly await direction.
Best Regards,
Bill@Zachary-Lowell-0 If you won't be able to help here, is there someone that can? Thanks
-
@Zachary-Lowell-0 If you won't be able to help here, is there someone that can? Thanks
@claw Hi, sorry for the delay I'm testing this out. I believe you compiled the wrong version of PX4 mgs with your code but I'll find out the correct version and let you know today.
-
@claw Hi, sorry for the delay I'm testing this out. I believe you compiled the wrong version of PX4 mgs with your code but I'll find out the correct version and let you know today.
@claw @GlennTee voxl-px4 in SDK 1.1.2 is based off 1.14 so you should be building px4-msgs on branch release/1.14. Let me know if you're still running into issues after confirming this.
-
@claw @GlennTee voxl-px4 in SDK 1.1.2 is based off 1.14 so you should be building px4-msgs on branch release/1.14. Let me know if you're still running into issues after confirming this.
-
@claw @GlennTee voxl-px4 in SDK 1.1.2 is based off 1.14 so you should be building px4-msgs on branch release/1.14. Let me know if you're still running into issues after confirming this.
@teddy-zaremba Thank you so much, using that specific version worked like a charm!
-
@GlennTee Great!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login