OV with External Autopilot
-
Hi! I'm trying to use
voxl-vision-hubto send voxl-open-vins position data to an external autopilot (ardupilot). I start by making sure the following services are running:- voxl-imu-server
- voxl-open-vins-server
- voxl-camera-server
- voxl-vision-hub
- voxl-mavlink-server
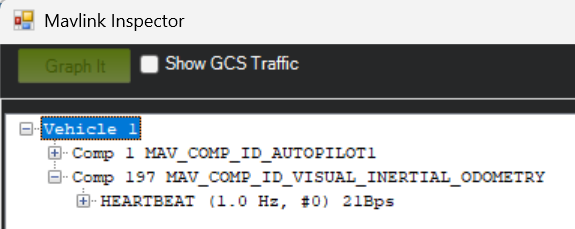
I can confirm that the voxl and external autopilot are connected because I see this on Mission Planner MAVLink Inspector:
and the debug output I see after running
voxl-vision-hub -dis:voxl2-mini:~$ voxl-vision-hub -d Enabling recv debugging for localhost UDP port from ROS loading our own config file ================================================================= Parameters as loaded from config file: config_file_version: 1 MAVROS / MAVSDK en_localhost_mavlink_udp 1 localhost_udp_port_number: 14551 VIO en_vio: 1 vio_pipe: ov secondary_vio_pipe: qvio en_reset_vio_if_initialized_inverted: 0 vio_warmup_s: 0.000000 send_odom_while_failed: 1 MISC FEATURES horizon_cal_tolerance: 0.500000 en_hitl: 0 OFFBOARD MODE offboard_mode: off follow_tag_id: 0 figure_eight_move_home: 1 wps_move_home: 1 wps_timeout: 0.000000 wps_damp: 1.000000 robot_radius: 0.300000 collision_sampling_dt: 0.100000 max_lookahead_distance: 1.000000 backtrack_seconds : 60 backtrack_rc_chan : 8 backtrack_rc_thresh : 1500 FIXED FRAME RELOCALIZATION en_tag_fixed_frame: 0 fixed_frame_filter_len: 5 en_transform_mavlink_pos_setpoints_from_fixed_frame:0 VOXL FLIGHT CONTROLLER (VFC) vfc_rate 100.000000 vfc_rc_chan_min 980 vfc_rc_chan_max 2020 vfc_thrust_ch 3 vfc_roll_ch 1 vfc_pitch_ch 2 vfc_yaw_ch 4 vfc_submode_ch 6 vfc_alt_mode_rc_min 0 vfc_alt_mode_rc_max 0 vfc_flow_mode_rc_min 0 vfc_flow_mode_rc_max 0 vfc_hybrid_flow_mode_rc_min 0 vfc_hybrid_flow_mode_rc_max 0 vfc_position_mode_rc_min 0 vfc_position_mode_rc_max 2100 vfc_traj_mode_rc_min 0 vfc_traj_mode_rc_max 0 vfc_yaw_deadband 30 vfc_vxy_deadband 50 vfc_vz_deadband 150 vfc_min_thrust 0.000000 vfc_max_thrust 0.800000 vfc_tilt_max 0.436000 vfc_yaw_rate_max 3.000000 vfc_thrust_hover 0.500000 vfc_vz_max 1.000000 vfc_kp_z 5.290000 vfc_kd_z 5.980000 vfc_vxy_max 3.000000 vfc_kp_xy 0.640000 vfc_kd_xy 2.560000 vfc_kp_z_vio 5.290000 vfc_kd_z_vio 5.980000 vfc_kp_xy_vio 3.240000 vfc_kd_xy_vio 3.960000 vfc_w_filt_xy_vio 10.000000 vfc_vel_ff_factor_vio 0.900000 vfc_xy_acc_limit_vio 2.500000 vfc_max_z_delta 3.000000 vfc_att_transition_time 0.500000 vfc_stick_move_threshold 30.000000 vfc_flow_transition_time 1.000000 vfc_q_min 10 vfc_points_min 7 vfc_en_submode_announcement 1 vfc_disable_fallback 0 COLLISION PREVENTION (VOA) en_voa: 0 voa_upper_bound_m: -0.150000 voa_lower_bound_m: 0.150000 voa_memory_s: 1.000000 voa_max_pc_per_fusion: 100 voa_pie_min_dist_m: 0.250000 voa_pie_max_dist_m: 20.000000 voa_pie_under_trim_m: 1.000000 voa_pie_threshold: 3 voa_pie_slices: 36 voa_pie_bin_depth_m: 0.150000 voa_send_rate_hz: 20.000000 voa_input #0 enabled: 0 type: point_cloud input_pipe: dfs_point_cloud frame: stereo_l max_depth: 8.000000 min_depth: 0.300000 cell_size: 0.080000 threshold: 4 x_fov_deg: 68.000000 y_fov_deg: 56.000000 conf_cutoff: 0 voa_input #1 enabled: 0 type: point_cloud input_pipe: stereo_front_pc frame: stereo_front_l max_depth: 8.000000 min_depth: 0.300000 cell_size: 0.080000 threshold: 4 x_fov_deg: 68.000000 y_fov_deg: 56.000000 conf_cutoff: 0 voa_input #2 enabled: 0 type: point_cloud input_pipe: stereo_rear_pc frame: stereo_rear_l max_depth: 8.000000 min_depth: 0.300000 cell_size: 0.080000 threshold: 4 x_fov_deg: 68.000000 y_fov_deg: 56.000000 conf_cutoff: 0 voa_input #3 enabled: 0 type: tof input_pipe: tof frame: tof max_depth: 6.000000 min_depth: 0.150000 cell_size: 0.080000 threshold: 3 x_fov_deg: 106.500000 y_fov_deg: 85.099998 conf_cutoff: 125 voa_input #4 enabled: 0 type: rangefinder input_pipe: rangefinders frame: body max_depth: 8.000000 min_depth: 0.300000 cell_size: 0.080000 threshold: 4 x_fov_deg: 68.000000 y_fov_deg: 56.000000 conf_cutoff: 0 ================================================================= loading extrinsics config file loading horizon cal file starting geometry module starting autopilot monitor starting mavlink IO Waiting to connect to voxl-mavlink-server Connected to voxl-mavlink-server starting mavlink for ros starting fixed pose input starting vio manager Connected to VIO pipe: ov Geometry module updating to use imu: imu_apps for VIO new T imu wrt body: 0.0407 -0.0060 -0.0188 new R imu to body: 1.0000 -0.0000 0.0000 0.0000 1.0000 -0.0000 0.0000 0.0000 1.0000 done updating transforms to use imu: imu_apps starting tag manager starting horizon cal module starting imu manager starting state manager Init complete from AP msgid: 0 sysid: 1 compid: 1 Detected Autopilot Mavlink SYSID 1 requesting autopilot_version from AP msgid: 0 sysid: 1 compid: 1 requesting autopilot_version from AP msgid: 77 sysid: 1 compid: 1 from AP msgid: 77 sysid: 1 compid: 1 from AP msgid: 148 sysid: 1 compid: 1 Detected autopilot version: 4.5.5 from AP msgid: 0 sysid: 1 compid: 1 from AP msgid: 0 sysid: 1 compid: 1 from AP msgid: 22 sysid: 1 compid: 1It seems like other than the heartbeat, no data is being sent to the external autopilot. Thanks in advance for any guidance that can help me sort this out!
-
Hi! I'm trying to use
voxl-vision-hubto send voxl-open-vins position data to an external autopilot (ardupilot). I start by making sure the following services are running:- voxl-imu-server
- voxl-open-vins-server
- voxl-camera-server
- voxl-vision-hub
- voxl-mavlink-server
I can confirm that the voxl and external autopilot are connected because I see this on Mission Planner MAVLink Inspector:
and the debug output I see after running
voxl-vision-hub -dis:voxl2-mini:~$ voxl-vision-hub -d Enabling recv debugging for localhost UDP port from ROS loading our own config file ================================================================= Parameters as loaded from config file: config_file_version: 1 MAVROS / MAVSDK en_localhost_mavlink_udp 1 localhost_udp_port_number: 14551 VIO en_vio: 1 vio_pipe: ov secondary_vio_pipe: qvio en_reset_vio_if_initialized_inverted: 0 vio_warmup_s: 0.000000 send_odom_while_failed: 1 MISC FEATURES horizon_cal_tolerance: 0.500000 en_hitl: 0 OFFBOARD MODE offboard_mode: off follow_tag_id: 0 figure_eight_move_home: 1 wps_move_home: 1 wps_timeout: 0.000000 wps_damp: 1.000000 robot_radius: 0.300000 collision_sampling_dt: 0.100000 max_lookahead_distance: 1.000000 backtrack_seconds : 60 backtrack_rc_chan : 8 backtrack_rc_thresh : 1500 FIXED FRAME RELOCALIZATION en_tag_fixed_frame: 0 fixed_frame_filter_len: 5 en_transform_mavlink_pos_setpoints_from_fixed_frame:0 VOXL FLIGHT CONTROLLER (VFC) vfc_rate 100.000000 vfc_rc_chan_min 980 vfc_rc_chan_max 2020 vfc_thrust_ch 3 vfc_roll_ch 1 vfc_pitch_ch 2 vfc_yaw_ch 4 vfc_submode_ch 6 vfc_alt_mode_rc_min 0 vfc_alt_mode_rc_max 0 vfc_flow_mode_rc_min 0 vfc_flow_mode_rc_max 0 vfc_hybrid_flow_mode_rc_min 0 vfc_hybrid_flow_mode_rc_max 0 vfc_position_mode_rc_min 0 vfc_position_mode_rc_max 2100 vfc_traj_mode_rc_min 0 vfc_traj_mode_rc_max 0 vfc_yaw_deadband 30 vfc_vxy_deadband 50 vfc_vz_deadband 150 vfc_min_thrust 0.000000 vfc_max_thrust 0.800000 vfc_tilt_max 0.436000 vfc_yaw_rate_max 3.000000 vfc_thrust_hover 0.500000 vfc_vz_max 1.000000 vfc_kp_z 5.290000 vfc_kd_z 5.980000 vfc_vxy_max 3.000000 vfc_kp_xy 0.640000 vfc_kd_xy 2.560000 vfc_kp_z_vio 5.290000 vfc_kd_z_vio 5.980000 vfc_kp_xy_vio 3.240000 vfc_kd_xy_vio 3.960000 vfc_w_filt_xy_vio 10.000000 vfc_vel_ff_factor_vio 0.900000 vfc_xy_acc_limit_vio 2.500000 vfc_max_z_delta 3.000000 vfc_att_transition_time 0.500000 vfc_stick_move_threshold 30.000000 vfc_flow_transition_time 1.000000 vfc_q_min 10 vfc_points_min 7 vfc_en_submode_announcement 1 vfc_disable_fallback 0 COLLISION PREVENTION (VOA) en_voa: 0 voa_upper_bound_m: -0.150000 voa_lower_bound_m: 0.150000 voa_memory_s: 1.000000 voa_max_pc_per_fusion: 100 voa_pie_min_dist_m: 0.250000 voa_pie_max_dist_m: 20.000000 voa_pie_under_trim_m: 1.000000 voa_pie_threshold: 3 voa_pie_slices: 36 voa_pie_bin_depth_m: 0.150000 voa_send_rate_hz: 20.000000 voa_input #0 enabled: 0 type: point_cloud input_pipe: dfs_point_cloud frame: stereo_l max_depth: 8.000000 min_depth: 0.300000 cell_size: 0.080000 threshold: 4 x_fov_deg: 68.000000 y_fov_deg: 56.000000 conf_cutoff: 0 voa_input #1 enabled: 0 type: point_cloud input_pipe: stereo_front_pc frame: stereo_front_l max_depth: 8.000000 min_depth: 0.300000 cell_size: 0.080000 threshold: 4 x_fov_deg: 68.000000 y_fov_deg: 56.000000 conf_cutoff: 0 voa_input #2 enabled: 0 type: point_cloud input_pipe: stereo_rear_pc frame: stereo_rear_l max_depth: 8.000000 min_depth: 0.300000 cell_size: 0.080000 threshold: 4 x_fov_deg: 68.000000 y_fov_deg: 56.000000 conf_cutoff: 0 voa_input #3 enabled: 0 type: tof input_pipe: tof frame: tof max_depth: 6.000000 min_depth: 0.150000 cell_size: 0.080000 threshold: 3 x_fov_deg: 106.500000 y_fov_deg: 85.099998 conf_cutoff: 125 voa_input #4 enabled: 0 type: rangefinder input_pipe: rangefinders frame: body max_depth: 8.000000 min_depth: 0.300000 cell_size: 0.080000 threshold: 4 x_fov_deg: 68.000000 y_fov_deg: 56.000000 conf_cutoff: 0 ================================================================= loading extrinsics config file loading horizon cal file starting geometry module starting autopilot monitor starting mavlink IO Waiting to connect to voxl-mavlink-server Connected to voxl-mavlink-server starting mavlink for ros starting fixed pose input starting vio manager Connected to VIO pipe: ov Geometry module updating to use imu: imu_apps for VIO new T imu wrt body: 0.0407 -0.0060 -0.0188 new R imu to body: 1.0000 -0.0000 0.0000 0.0000 1.0000 -0.0000 0.0000 0.0000 1.0000 done updating transforms to use imu: imu_apps starting tag manager starting horizon cal module starting imu manager starting state manager Init complete from AP msgid: 0 sysid: 1 compid: 1 Detected Autopilot Mavlink SYSID 1 requesting autopilot_version from AP msgid: 0 sysid: 1 compid: 1 requesting autopilot_version from AP msgid: 77 sysid: 1 compid: 1 from AP msgid: 77 sysid: 1 compid: 1 from AP msgid: 148 sysid: 1 compid: 1 Detected autopilot version: 4.5.5 from AP msgid: 0 sysid: 1 compid: 1 from AP msgid: 0 sysid: 1 compid: 1 from AP msgid: 22 sysid: 1 compid: 1It seems like other than the heartbeat, no data is being sent to the external autopilot. Thanks in advance for any guidance that can help me sort this out!
-
@SKA I would review this page if you haven't already: https://docs.modalai.com/voxl2-external-flight-controller/
@tom Thanks! I referred to this page in order to set up what I have right now.
My voxl 2 mini is connected to the external autopilot using the one exposed UART. It seems to be connected fine, since I'm receiving the voxl heartbeat on the autopilot end, and I'm receiving autopilot mavlink messages on the voxl side.I wonder if there is anything I might be missing on the voxl-vision-hub side, or elsewhere.
Thanks for your help! -
@tom Thanks! I referred to this page in order to set up what I have right now.
My voxl 2 mini is connected to the external autopilot using the one exposed UART. It seems to be connected fine, since I'm receiving the voxl heartbeat on the autopilot end, and I'm receiving autopilot mavlink messages on the voxl side.I wonder if there is anything I might be missing on the voxl-vision-hub side, or elsewhere.
Thanks for your help!@tom I have some updates, and here's more info on my setup!
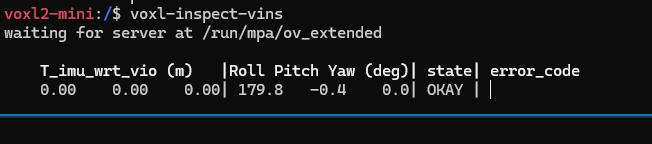
voxl-open-vins-serveris running and outputting the following:
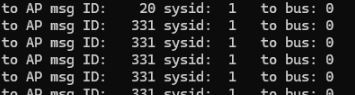
voxl-vision-hubandvoxl-mavlink-serverare running, and the odom messages are being sent. Here's the output fromvoxl-mavlink-server -l:
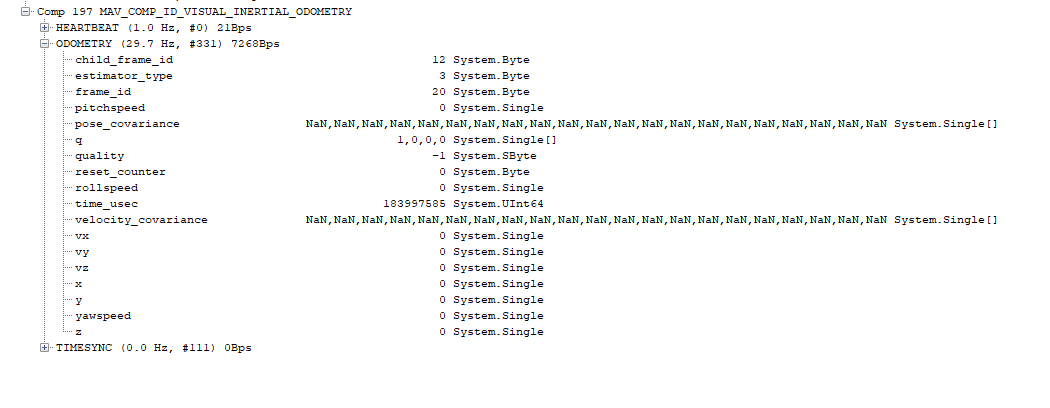
At my external autopilot, the Odometry messages are coming through, but the values are not populating/reading correctly:
Thanks in advance for any input you may have!
-
@tom I have some updates, and here's more info on my setup!
voxl-open-vins-serveris running and outputting the following:
voxl-vision-hubandvoxl-mavlink-serverare running, and the odom messages are being sent. Here's the output fromvoxl-mavlink-server -l:
At my external autopilot, the Odometry messages are coming through, but the values are not populating/reading correctly:
Thanks in advance for any input you may have!
@SKA What version of the SDK do you have installed? Can you post the output of
voxl-version? -
@SKA What version of the SDK do you have installed? Can you post the output of
voxl-version?Here's the output of voxl-version:
voxl2-mini:~$ voxl-version -------------------------------------------------------------------------------- system-image: 1.8.02-M0104-14.1a-perf kernel: #1 SMP PREEMPT Mon Nov 11 23:21:25 UTC 2024 4.19.125 -------------------------------------------------------------------------------- hw platform: M0104 mach.var: 2.0.0 -------------------------------------------------------------------------------- voxl-suite: 1.4.0 -------------------------------------------------------------------------------- Packages: Repo: http://voxl-packages.modalai.com/ ./dists/qrb5165/sdk-1.4/binary-arm64/ Last Updated: 2025-03-12 18:51:42 WARNING: repo file has changed since last update, packages may have originated from a different repo List: kernel-module-voxl-fsync-mod-4.19.125 1.0-r0 kernel-module-voxl-gpio-mod-4.19.125 1.0-r0 kernel-module-voxl-platform-mod-4.19.125 1.0-r0 libfc-sensor 1.0.7 libmodal-cv 0.5.16 libmodal-exposure 0.1.3 libmodal-journal 0.2.2 libmodal-json 0.4.3 libmodal-pipe 2.10.4 libqrb5165-io 0.4.7 libvoxl-cci-direct 0.2.3 libvoxl-cutils 0.1.1 modalai-slpi 1.1.19 mv-voxl 0.1-r0 qrb5165-bind 0.1-r0 qrb5165-dfs-server 0.2.0 qrb5165-imu-server 1.1.0 qrb5165-rangefinder-server 0.1.4 qrb5165-slpi-test-sig 01-r0 qrb5165-system-tweaks 0.3.2 qrb5165-tflite 2.8.0-2 voxl-bind-spektrum 0.1.1 voxl-camera-calibration 0.5.9 voxl-camera-server 2.0.2 voxl-ceres-solver 2:1.14.0-10 voxl-configurator 0.9.4 voxl-cpu-monitor 0.5.1 voxl-docker-support 1.3.1 voxl-elrs 0.3.4 voxl-esc 1.4.8 voxl-feature-tracker 0.5.2 voxl-flow-server 0.3.6 voxl-fsync-mod 1.0-r0 voxl-gimbal 0.0.1 voxl-gphoto2-server 0.0.10 voxl-gpio-mod 1.0-r0 voxl-io-server 0.0.4 voxl-jpeg-turbo 2.1.3-5 voxl-lepton-server 1.3.3 voxl-lepton-tracker 0.0.4 voxl-libgphoto2 0.0.4 voxl-libuvc 1.0.7 voxl-logger 0.4.9 voxl-mavcam-manager 0.5.7 voxl-mavlink 0.1.1 voxl-mavlink-server 1.4.4 voxl-modem 1.1.3 voxl-mongoose 7.7.0-1 voxl-mpa-to-ros 0.3.9 voxl-mpa-tools 1.3.4 voxl-open-vins 0.4.14 voxl-open-vins-server 0.2.83 voxl-opencv 4.5.5-2 voxl-osd 0.0.2 voxl-platform-mod 1.0-r0 voxl-portal 0.7.2 voxl-px4 1.14.0-2.0.93 voxl-px4-imu-server 0.1.2 voxl-px4-params 0.5.8 voxl-qvio-server 1.1.1 voxl-remote-id 0.0.9 voxl-reset-slpi 0.0.1 voxl-state-estimator 0.0.3 voxl-streamer 0.7.5 voxl-suite 1.4.0 voxl-tag-detector 0.0.4 voxl-tflite-server 0.3.7 voxl-utils 1.4.4 voxl-uvc-server 0.1.7 voxl-vision-hub 1.8.18 voxl-vtx 1.1.3 voxl2-io 0.0.3 voxl2-system-image 1.8.02-r0 voxl2-wlan 1.0-r0 -------------------------------------------------------------------------------- -
Here's the output of voxl-version:
voxl2-mini:~$ voxl-version -------------------------------------------------------------------------------- system-image: 1.8.02-M0104-14.1a-perf kernel: #1 SMP PREEMPT Mon Nov 11 23:21:25 UTC 2024 4.19.125 -------------------------------------------------------------------------------- hw platform: M0104 mach.var: 2.0.0 -------------------------------------------------------------------------------- voxl-suite: 1.4.0 -------------------------------------------------------------------------------- Packages: Repo: http://voxl-packages.modalai.com/ ./dists/qrb5165/sdk-1.4/binary-arm64/ Last Updated: 2025-03-12 18:51:42 WARNING: repo file has changed since last update, packages may have originated from a different repo List: kernel-module-voxl-fsync-mod-4.19.125 1.0-r0 kernel-module-voxl-gpio-mod-4.19.125 1.0-r0 kernel-module-voxl-platform-mod-4.19.125 1.0-r0 libfc-sensor 1.0.7 libmodal-cv 0.5.16 libmodal-exposure 0.1.3 libmodal-journal 0.2.2 libmodal-json 0.4.3 libmodal-pipe 2.10.4 libqrb5165-io 0.4.7 libvoxl-cci-direct 0.2.3 libvoxl-cutils 0.1.1 modalai-slpi 1.1.19 mv-voxl 0.1-r0 qrb5165-bind 0.1-r0 qrb5165-dfs-server 0.2.0 qrb5165-imu-server 1.1.0 qrb5165-rangefinder-server 0.1.4 qrb5165-slpi-test-sig 01-r0 qrb5165-system-tweaks 0.3.2 qrb5165-tflite 2.8.0-2 voxl-bind-spektrum 0.1.1 voxl-camera-calibration 0.5.9 voxl-camera-server 2.0.2 voxl-ceres-solver 2:1.14.0-10 voxl-configurator 0.9.4 voxl-cpu-monitor 0.5.1 voxl-docker-support 1.3.1 voxl-elrs 0.3.4 voxl-esc 1.4.8 voxl-feature-tracker 0.5.2 voxl-flow-server 0.3.6 voxl-fsync-mod 1.0-r0 voxl-gimbal 0.0.1 voxl-gphoto2-server 0.0.10 voxl-gpio-mod 1.0-r0 voxl-io-server 0.0.4 voxl-jpeg-turbo 2.1.3-5 voxl-lepton-server 1.3.3 voxl-lepton-tracker 0.0.4 voxl-libgphoto2 0.0.4 voxl-libuvc 1.0.7 voxl-logger 0.4.9 voxl-mavcam-manager 0.5.7 voxl-mavlink 0.1.1 voxl-mavlink-server 1.4.4 voxl-modem 1.1.3 voxl-mongoose 7.7.0-1 voxl-mpa-to-ros 0.3.9 voxl-mpa-tools 1.3.4 voxl-open-vins 0.4.14 voxl-open-vins-server 0.2.83 voxl-opencv 4.5.5-2 voxl-osd 0.0.2 voxl-platform-mod 1.0-r0 voxl-portal 0.7.2 voxl-px4 1.14.0-2.0.93 voxl-px4-imu-server 0.1.2 voxl-px4-params 0.5.8 voxl-qvio-server 1.1.1 voxl-remote-id 0.0.9 voxl-reset-slpi 0.0.1 voxl-state-estimator 0.0.3 voxl-streamer 0.7.5 voxl-suite 1.4.0 voxl-tag-detector 0.0.4 voxl-tflite-server 0.3.7 voxl-utils 1.4.4 voxl-uvc-server 0.1.7 voxl-vision-hub 1.8.18 voxl-vtx 1.1.3 voxl2-io 0.0.3 voxl2-system-image 1.8.02-r0 voxl2-wlan 1.0-r0 --------------------------------------------------------------------------------@SKA Okay, great, that's a very recent SDK so that's good. Have you also made sure to disable the voxl-qvio-server service?
-
@SKA Okay, great, that's a very recent SDK so that's good. Have you also made sure to disable the voxl-qvio-server service?
@Eric-Katzfey Your output shows that it is connecting properly to ov pipe so shouldn't really be necessary to stop voxl-qvio-server but probably a good idea anyways.
-
Here's the output of voxl-version:
voxl2-mini:~$ voxl-version -------------------------------------------------------------------------------- system-image: 1.8.02-M0104-14.1a-perf kernel: #1 SMP PREEMPT Mon Nov 11 23:21:25 UTC 2024 4.19.125 -------------------------------------------------------------------------------- hw platform: M0104 mach.var: 2.0.0 -------------------------------------------------------------------------------- voxl-suite: 1.4.0 -------------------------------------------------------------------------------- Packages: Repo: http://voxl-packages.modalai.com/ ./dists/qrb5165/sdk-1.4/binary-arm64/ Last Updated: 2025-03-12 18:51:42 WARNING: repo file has changed since last update, packages may have originated from a different repo List: kernel-module-voxl-fsync-mod-4.19.125 1.0-r0 kernel-module-voxl-gpio-mod-4.19.125 1.0-r0 kernel-module-voxl-platform-mod-4.19.125 1.0-r0 libfc-sensor 1.0.7 libmodal-cv 0.5.16 libmodal-exposure 0.1.3 libmodal-journal 0.2.2 libmodal-json 0.4.3 libmodal-pipe 2.10.4 libqrb5165-io 0.4.7 libvoxl-cci-direct 0.2.3 libvoxl-cutils 0.1.1 modalai-slpi 1.1.19 mv-voxl 0.1-r0 qrb5165-bind 0.1-r0 qrb5165-dfs-server 0.2.0 qrb5165-imu-server 1.1.0 qrb5165-rangefinder-server 0.1.4 qrb5165-slpi-test-sig 01-r0 qrb5165-system-tweaks 0.3.2 qrb5165-tflite 2.8.0-2 voxl-bind-spektrum 0.1.1 voxl-camera-calibration 0.5.9 voxl-camera-server 2.0.2 voxl-ceres-solver 2:1.14.0-10 voxl-configurator 0.9.4 voxl-cpu-monitor 0.5.1 voxl-docker-support 1.3.1 voxl-elrs 0.3.4 voxl-esc 1.4.8 voxl-feature-tracker 0.5.2 voxl-flow-server 0.3.6 voxl-fsync-mod 1.0-r0 voxl-gimbal 0.0.1 voxl-gphoto2-server 0.0.10 voxl-gpio-mod 1.0-r0 voxl-io-server 0.0.4 voxl-jpeg-turbo 2.1.3-5 voxl-lepton-server 1.3.3 voxl-lepton-tracker 0.0.4 voxl-libgphoto2 0.0.4 voxl-libuvc 1.0.7 voxl-logger 0.4.9 voxl-mavcam-manager 0.5.7 voxl-mavlink 0.1.1 voxl-mavlink-server 1.4.4 voxl-modem 1.1.3 voxl-mongoose 7.7.0-1 voxl-mpa-to-ros 0.3.9 voxl-mpa-tools 1.3.4 voxl-open-vins 0.4.14 voxl-open-vins-server 0.2.83 voxl-opencv 4.5.5-2 voxl-osd 0.0.2 voxl-platform-mod 1.0-r0 voxl-portal 0.7.2 voxl-px4 1.14.0-2.0.93 voxl-px4-imu-server 0.1.2 voxl-px4-params 0.5.8 voxl-qvio-server 1.1.1 voxl-remote-id 0.0.9 voxl-reset-slpi 0.0.1 voxl-state-estimator 0.0.3 voxl-streamer 0.7.5 voxl-suite 1.4.0 voxl-tag-detector 0.0.4 voxl-tflite-server 0.3.7 voxl-utils 1.4.4 voxl-uvc-server 0.1.7 voxl-vision-hub 1.8.18 voxl-vtx 1.1.3 voxl2-io 0.0.3 voxl2-system-image 1.8.02-r0 voxl2-wlan 1.0-r0 --------------------------------------------------------------------------------@SKA That odometry output results when voxl-vision-hub thinks that vio is in a failed state and sends out that default message. Does the time_usec field increment normally? Do you ever see it populate with good data or is it always showing that? Here is the code where it sends that: https://gitlab.com/voxl-public/voxl-sdk/services/voxl-vision-hub/-/blob/master/src/vio_manager.c?ref_type=heads#L150
-
Here's the output of voxl-version:
voxl2-mini:~$ voxl-version -------------------------------------------------------------------------------- system-image: 1.8.02-M0104-14.1a-perf kernel: #1 SMP PREEMPT Mon Nov 11 23:21:25 UTC 2024 4.19.125 -------------------------------------------------------------------------------- hw platform: M0104 mach.var: 2.0.0 -------------------------------------------------------------------------------- voxl-suite: 1.4.0 -------------------------------------------------------------------------------- Packages: Repo: http://voxl-packages.modalai.com/ ./dists/qrb5165/sdk-1.4/binary-arm64/ Last Updated: 2025-03-12 18:51:42 WARNING: repo file has changed since last update, packages may have originated from a different repo List: kernel-module-voxl-fsync-mod-4.19.125 1.0-r0 kernel-module-voxl-gpio-mod-4.19.125 1.0-r0 kernel-module-voxl-platform-mod-4.19.125 1.0-r0 libfc-sensor 1.0.7 libmodal-cv 0.5.16 libmodal-exposure 0.1.3 libmodal-journal 0.2.2 libmodal-json 0.4.3 libmodal-pipe 2.10.4 libqrb5165-io 0.4.7 libvoxl-cci-direct 0.2.3 libvoxl-cutils 0.1.1 modalai-slpi 1.1.19 mv-voxl 0.1-r0 qrb5165-bind 0.1-r0 qrb5165-dfs-server 0.2.0 qrb5165-imu-server 1.1.0 qrb5165-rangefinder-server 0.1.4 qrb5165-slpi-test-sig 01-r0 qrb5165-system-tweaks 0.3.2 qrb5165-tflite 2.8.0-2 voxl-bind-spektrum 0.1.1 voxl-camera-calibration 0.5.9 voxl-camera-server 2.0.2 voxl-ceres-solver 2:1.14.0-10 voxl-configurator 0.9.4 voxl-cpu-monitor 0.5.1 voxl-docker-support 1.3.1 voxl-elrs 0.3.4 voxl-esc 1.4.8 voxl-feature-tracker 0.5.2 voxl-flow-server 0.3.6 voxl-fsync-mod 1.0-r0 voxl-gimbal 0.0.1 voxl-gphoto2-server 0.0.10 voxl-gpio-mod 1.0-r0 voxl-io-server 0.0.4 voxl-jpeg-turbo 2.1.3-5 voxl-lepton-server 1.3.3 voxl-lepton-tracker 0.0.4 voxl-libgphoto2 0.0.4 voxl-libuvc 1.0.7 voxl-logger 0.4.9 voxl-mavcam-manager 0.5.7 voxl-mavlink 0.1.1 voxl-mavlink-server 1.4.4 voxl-modem 1.1.3 voxl-mongoose 7.7.0-1 voxl-mpa-to-ros 0.3.9 voxl-mpa-tools 1.3.4 voxl-open-vins 0.4.14 voxl-open-vins-server 0.2.83 voxl-opencv 4.5.5-2 voxl-osd 0.0.2 voxl-platform-mod 1.0-r0 voxl-portal 0.7.2 voxl-px4 1.14.0-2.0.93 voxl-px4-imu-server 0.1.2 voxl-px4-params 0.5.8 voxl-qvio-server 1.1.1 voxl-remote-id 0.0.9 voxl-reset-slpi 0.0.1 voxl-state-estimator 0.0.3 voxl-streamer 0.7.5 voxl-suite 1.4.0 voxl-tag-detector 0.0.4 voxl-tflite-server 0.3.7 voxl-utils 1.4.4 voxl-uvc-server 0.1.7 voxl-vision-hub 1.8.18 voxl-vtx 1.1.3 voxl2-io 0.0.3 voxl2-system-image 1.8.02-r0 voxl2-wlan 1.0-r0 --------------------------------------------------------------------------------@SKA voxl-vision-hub will print out debug messages showing VIO status as it is running. Can you see anything that may indicate why it thinks VIO is failed?
-
@SKA voxl-vision-hub will print out debug messages showing VIO status as it is running. Can you see anything that may indicate why it thinks VIO is failed?
@Eric-Katzfey Thanks for helping me out with this! I've made some progress at narrowing in on the problem. First to answer your questions:
- QVIO: I tried with
voxl-qvio-serverdisabled, this didn't change anything. - VIO failed state: I fixed some other issues leading to the failed state from
voxl-open-vins-server. Now the ovins translation and rotation outputs look healthy, and time_usec increments normally, but the external autopilot still does not log the odometry output. - Debug: VIO status debug shows that it isn't failing.
I was able to get qvio odometry outputs to log on the external autopilot, but when I switched over to ovins, it fails. With ovins I still see incoming VIO (comp IP 197) heartbeat and timestamp mavlink messages going through, but not the 331 odometry message.
Let me know what you think, thanks so much!
- QVIO: I tried with
-
@Eric-Katzfey Thanks for helping me out with this! I've made some progress at narrowing in on the problem. First to answer your questions:
- QVIO: I tried with
voxl-qvio-serverdisabled, this didn't change anything. - VIO failed state: I fixed some other issues leading to the failed state from
voxl-open-vins-server. Now the ovins translation and rotation outputs look healthy, and time_usec increments normally, but the external autopilot still does not log the odometry output. - Debug: VIO status debug shows that it isn't failing.
I was able to get qvio odometry outputs to log on the external autopilot, but when I switched over to ovins, it fails. With ovins I still see incoming VIO (comp IP 197) heartbeat and timestamp mavlink messages going through, but not the 331 odometry message.
Let me know what you think, thanks so much!
@SKA What pipes do you see listed in
/run/mpa? If you run the commandvoxl-inspect-viodoes it show that VIO is running okay? - QVIO: I tried with
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login