Drone not flying manually with ORQA FPV.Ctrl controller
-
Hello, I am trying to fly the starling 2 drone with the controller (uber lite ORQA FPV.Ctrl) that came with it, but somehow my drone is not arming. I am not sure if drone is even bounded to controller or not. But as soon as I turn on my controller the led in back turns green and also the led on drone turns green from red, which seems to me that controller is bounded, but then when I turn my left joystick to bottom right corner for arming the drone doesn't arm and propellor doesn't spin. The kill switch is also off. So I don't know what is the problem. Could you please help me with this?
Thank you!
-
Hello, I am trying to fly the starling 2 drone with the controller (uber lite ORQA FPV.Ctrl) that came with it, but somehow my drone is not arming. I am not sure if drone is even bounded to controller or not. But as soon as I turn on my controller the led in back turns green and also the led on drone turns green from red, which seems to me that controller is bounded, but then when I turn my left joystick to bottom right corner for arming the drone doesn't arm and propellor doesn't spin. The kill switch is also off. So I don't know what is the problem. Could you please help me with this?
Thank you!
-
Hello, I am trying to fly the starling 2 drone with the controller (uber lite ORQA FPV.Ctrl) that came with it, but somehow my drone is not arming. I am not sure if drone is even bounded to controller or not. But as soon as I turn on my controller the led in back turns green and also the led on drone turns green from red, which seems to me that controller is bounded, but then when I turn my left joystick to bottom right corner for arming the drone doesn't arm and propellor doesn't spin. The kill switch is also off. So I don't know what is the problem. Could you please help me with this?
Thank you!
@Jainik-Mehta Can you arm directly with QGC? Also, try calibrating the RC in QGC to see if that changes things. Also, what is the value of the PX4 parameter MAN_ARM_GESTURE?
-
@Jainik-Mehta Can you arm directly with QGC? Also, try calibrating the RC in QGC to see if that changes things. Also, what is the value of the PX4 parameter MAN_ARM_GESTURE?
@Eric-Katzfey I am trying to arm my drone via QGC but I am getting following error:
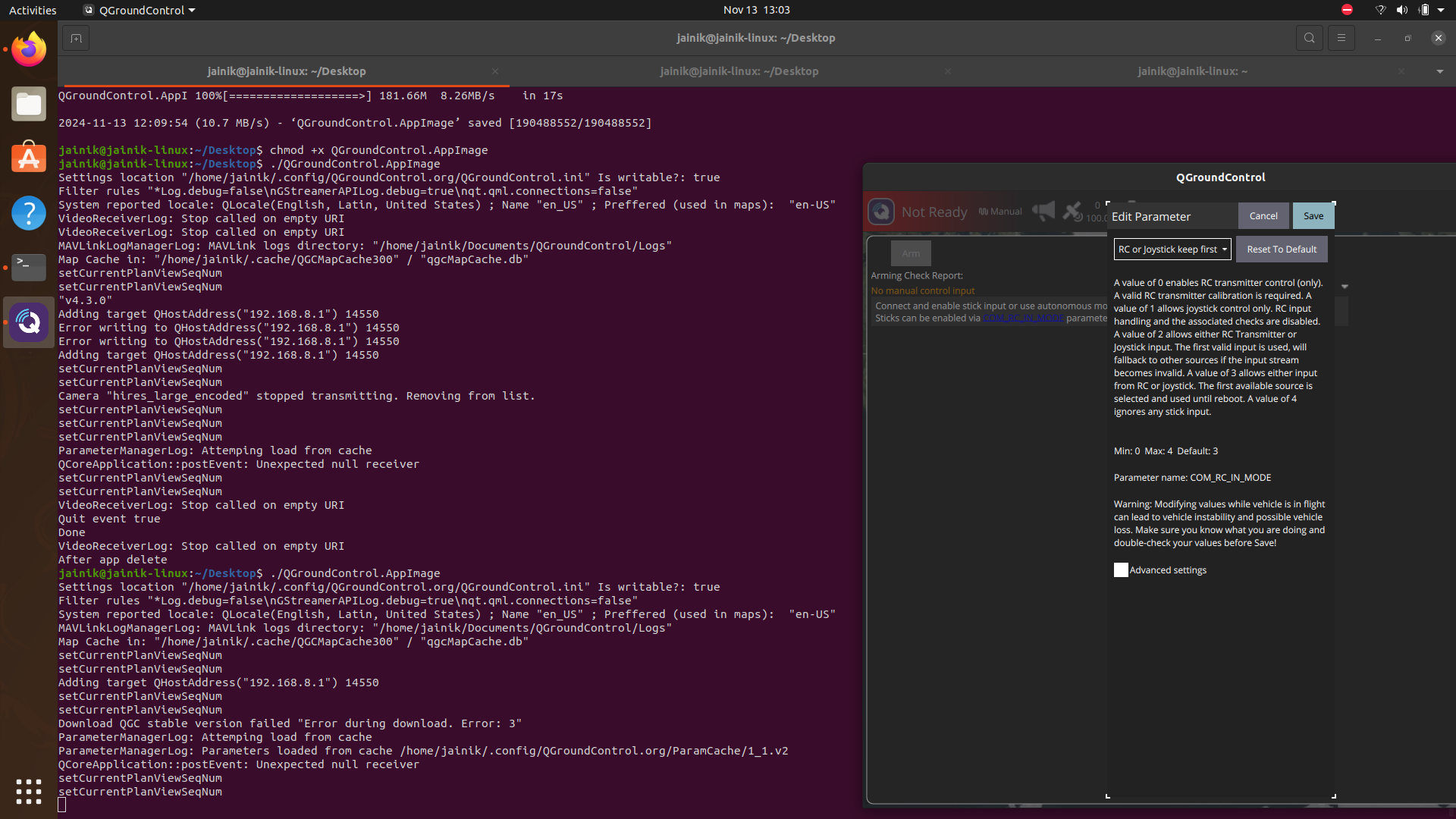
I am not sure what can be the problem.
-
@Jainik-Mehta Can you arm directly with QGC? Also, try calibrating the RC in QGC to see if that changes things. Also, what is the value of the PX4 parameter MAN_ARM_GESTURE?
@Eric-Katzfey Also I am getting following message:
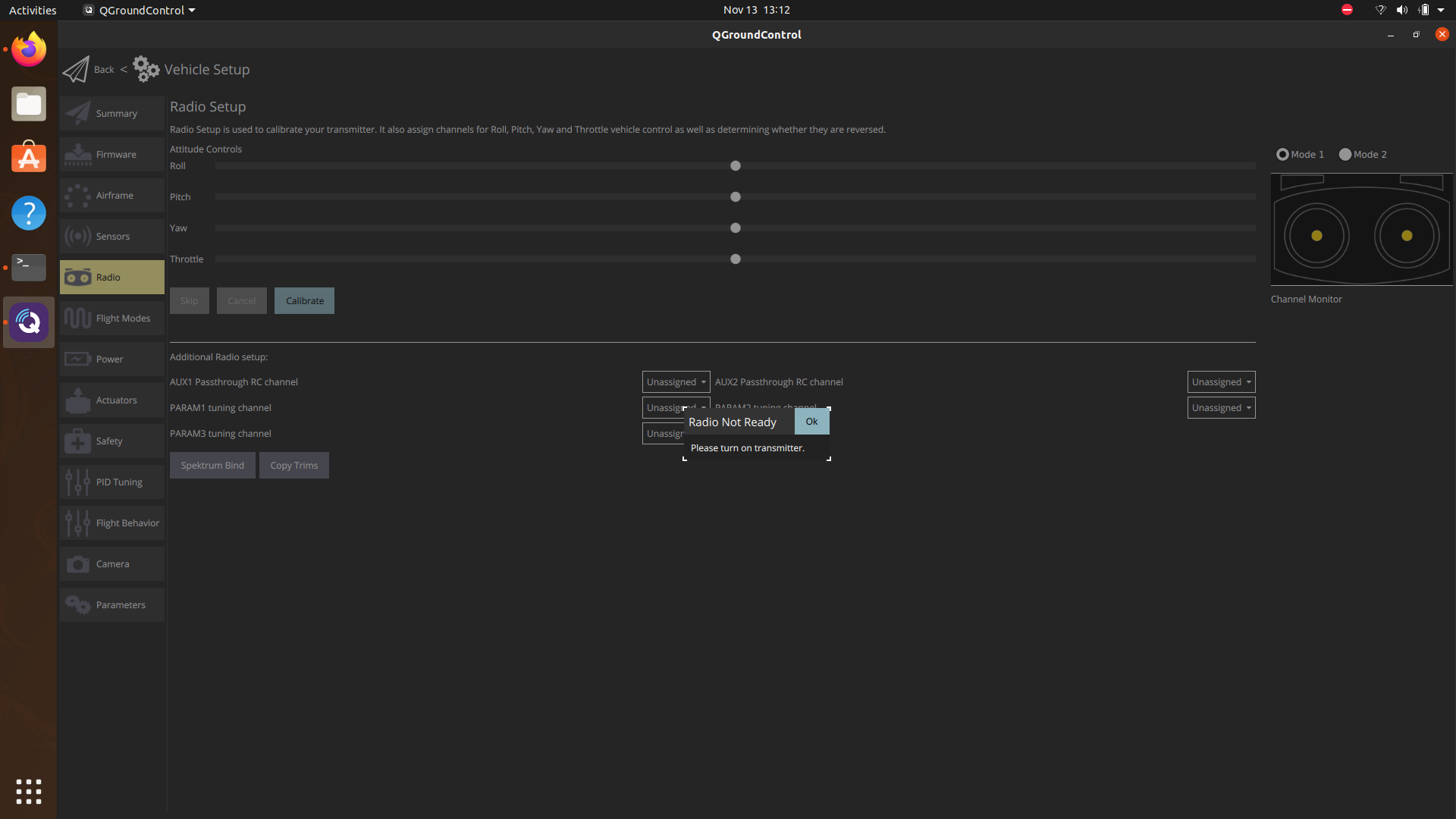
I guess radio transmitter is still not paired. But drone light turns green as soon as I turn on the transmitter so what can be issue here?
-
@Eric-Katzfey Also I am getting following message:
I guess radio transmitter is still not paired. But drone light turns green as soon as I turn on the transmitter so what can be issue here?
-
@Jainik-Mehta What does your
/etc/modalai/voxl-px4.conffile look like?@tom said in Drone not flying manually with ORQA FPV.Ctrl controller:
/etc/modalai/voxl-px4.conf
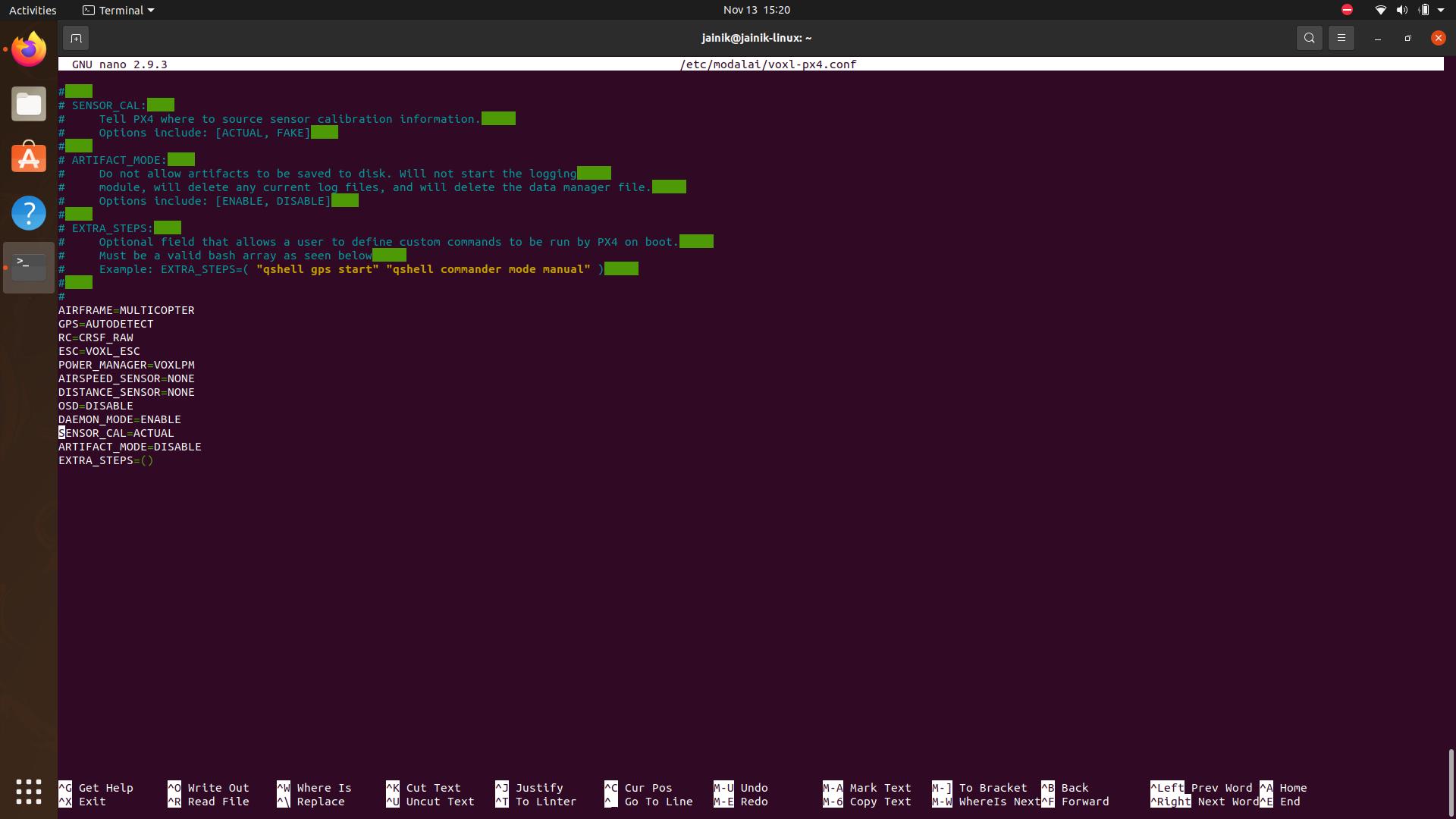
This is my /etc/modalai/voxl-px4.conf file:

-
@tom said in Drone not flying manually with ORQA FPV.Ctrl controller:
/etc/modalai/voxl-px4.conf
This is my /etc/modalai/voxl-px4.conf file:
-
@Jainik-Mehta RC needs to be set to GHST
@tom Thank you! This solution worked. I changed this value and reboot the drone and it now connects and fly well with the RC controller.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login