Drone not moving in Offboard Mode
-
I'm using a VOXL2 compute along with Flight Core V2 as external flight controller for development. I'm using the Starling 1 Image sensors.
Flight Controller: Flight Core V2
PX4 version: v1.15.1 (Stable)
Companion Computer: VOXL 2The VOXL2 communicates with FC as mentioned in this documentation.
The drone holds based on PX4 EV parameter using tracking camera fusing with a Optical Flow with Rangefinder onboard. I'm able to see the odometry message being shown in mavlink console on QGC. Also, I try streaming the message
mavlink stream -r 30 -s ODOMETRY -d /dev/ttyS1In
voxl-vision-hubI have set the mode tofigure_eight. But once, I switch to offboard mode from position mode the drone stays at the same place and does not perform figure 8.Once I ssh into VOXL2, and check for
mavlink status, I get the following output without #331 ID ODOMETRY message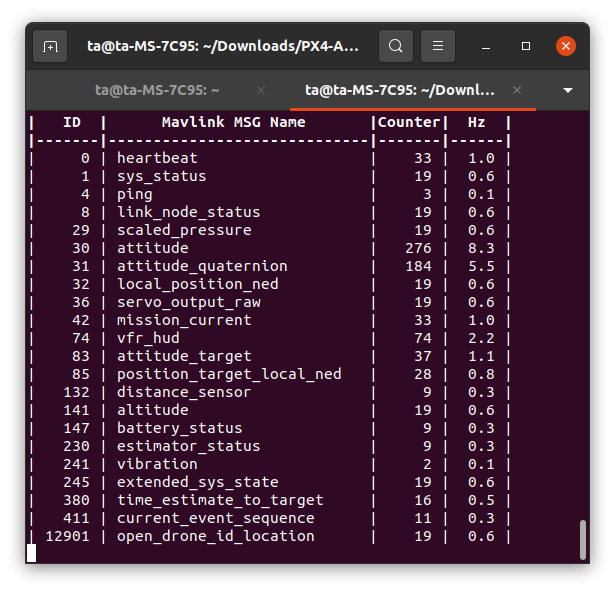
For VIO inputs, I'm relying on Tracking camera from QVIO server. I'm not sure if VIO estimates from VOXL2 are being sent to FC. How can I troubleshoot to check for the
ODOMETRYmessage to be passed on?I'm working on this as a priority, so any suggestion will be quickly tested. I hope to hear from you.
-
@Jetson-Nano said in Drone not moving in Offboard Mode:
mavlink stream -r 30 -s ODOMETRY -d /dev/ttyS1
@Jetson-Nano why are you running a mavlink stream for ODOMETRY? Voxl-vision hub automatically handles the streaming of odometry into the flight core.
If you are able to fly it in position mode without a GPS and QVIO is enabled and Odometry is showing in the mavlink console, then the packets are most likely making it to the Flight Core - I would recommend though removing the Optical flow and Rangefinder to ensure that you are indeed getting odometry from qvio and not from the optical flow and rangefinder.
To confirm, can oyu please paste the paraemeters for voxl-vision-hub.conf as well as your parameters from QGC on efk2_ev*?
Thanks,
Zach -
@Zachary-Lowell-0 Thanks for reverting back. Earlier I was using a different flight controller with the similar system setup. When I had faced this issue, I was mentioned to run the seperate odometry stream command.
Sharing that post for your ref. link.
Parameters I have set for
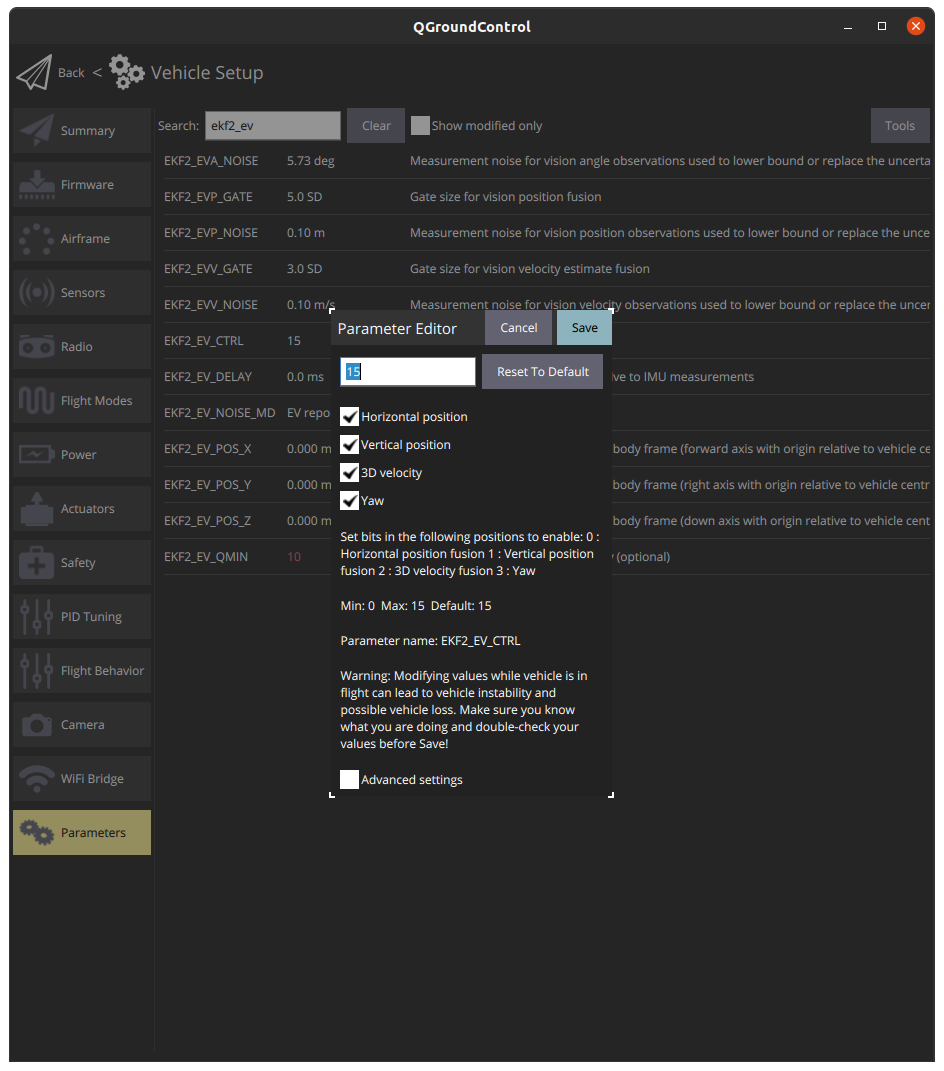
voxl-vision-hub"config_file_version": 1, "en_localhost_mavlink_udp": true, "localhost_udp_port_number": 14551, "en_vio": true, "vio_pipe": "qvio", "secondary_vio_pipe": "ov", "en_reset_vio_if_initialized_inverted": true, "vio_warmup_s": 3, "send_odom_while_failed": true, "horizon_cal_tolerance": 0.5, "offboard_mode": "figure_eight", "follow_tag_id": 0, "figure_eight_move_home": true, "robot_radius": 0.300000011920929, "collision_sampling_dt": 0.1, "max_lookahead_distance": 1, "backtrack_seconds": 5, "wps_move_home": true, "wps_stride": 0, "wps_timeout": 0, "wps_damp": 1, "en_tag_fixed_frame": false, "fixed_frame_filter_len": 5, "en_transform_mavlink_pos_setpoints_from_fixed_frame": true, "en_voa": true, "voa_upper_bound_m": -0.15000000596046448, "voa_lower_bound_m": 0.15000000596046448, "voa_voa_memory_s": 1, "voa_max_pc_per_fusion": 100, "voa_pie_max_dist_m": 20, "voa_pie_min_dist_m": 0.25, "voa_pie_under_trim_m": 1, "voa_pie_threshold": 3, "voa_send_rate_hz": 20, "voa_pie_slices": 36, "voa_pie_bin_depth_m": 0.15000000596046448, "voa_inputs": [{The PX4 parameters in QGC for EKF2_EV_CTRL,
-
Hello @Eric-Katzfey @Zachary-Lowell-0 @James-Strawson @tom
Could you look into once?
-
@Zachary-Lowell-0 @Alex-Kushleyev @Eric-Katzfey @tom Could you look into this please?
-
@Jetson-Nano As suggested before, can you disable the rangefinder and optic flow and see if things work with VIO alone?