VOXL2 detected landing at ~27m altitude and cut motors
-
We were attempting a tuning flight with a fresh rebuild and while checking stability all motors shut off, drone flipped and crashed inverted. Log attached, of note is in the logged messages "landing detected at 09:13 while it was approximately 27m in the air.
Hardware:
VOXL2
FPV ESC
Tmotor MN5006 450kv (params tuned for low kv)
Doodle Meshrider radio
Control via Jeti RC connected to GCS -
We were attempting a tuning flight with a fresh rebuild and while checking stability all motors shut off, drone flipped and crashed inverted. Log attached, of note is in the logged messages "landing detected at 09:13 while it was approximately 27m in the air.
Hardware:
VOXL2
FPV ESC
Tmotor MN5006 450kv (params tuned for low kv)
Doodle Meshrider radio
Control via Jeti RC connected to GCS@restore Unfortunately that looks to be a PX4 issue unrelated to VOXL2. Your vehicle is lightly loaded hovering below 20% throttle. The combination of low throttle and relatively high vertical acceleration vibration while descending in altitude mode triggered a false landing detection.
-
@restore Unfortunately that looks to be a PX4 issue unrelated to VOXL2. Your vehicle is lightly loaded hovering below 20% throttle. The combination of low throttle and relatively high vertical acceleration vibration while descending in altitude mode triggered a false landing detection.
@restore, I am sorry that it happened to you.. I think that I agree with @ben-grocholsky on the cause of the issue.
In your params, the maximum RPM is 6200 and at hover it looks like the motors spin around 3000rpm. Under simplifying assumptions that thrust = a*rpm^2, it means your vehicle is about 4:1 thrust to weight ratio, which is generally not good for large vehicles because of slow spinning props having light disk loading, will be more unstable at low RPMs.
However, the light loading is not itself the cause of the crash - but as Ben said PX4 thought the vehicle has landed (due to potentially incorrect px4 parameters) and the motors were commanded to stop, as seen here:
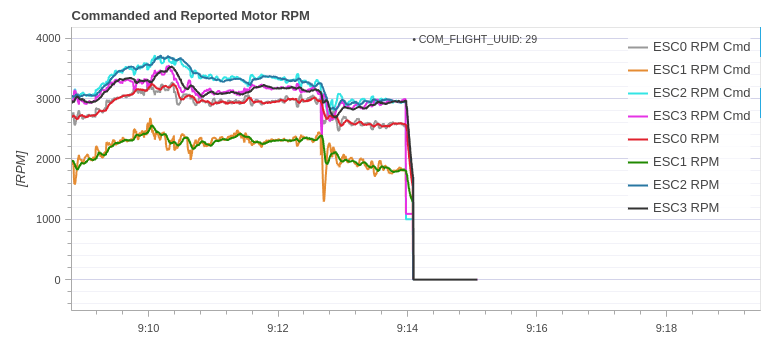
Your param for MPC_THR_HOVER is set to 0.34, but actual throttle to hover was below 0.2 it seems. There is some help on configuring these parameters : https://docs.px4.io/main/en/advanced_config/land_detector.html
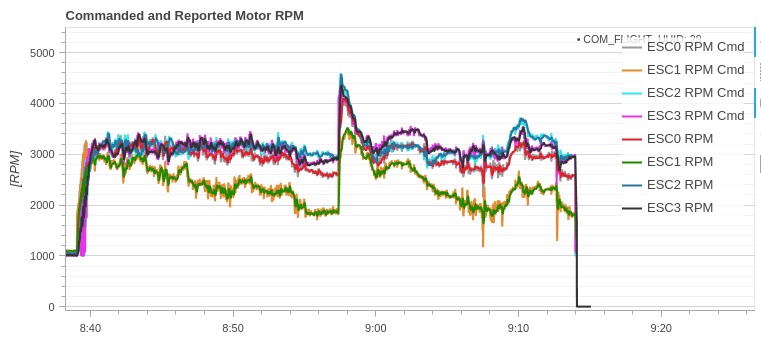
Also, looking at commanded / actual rpms, you can see that ESC1 RPMs are lower than the others, which could mean that the vehicle's center of mass is not in the center of the vehicle, so one motor is spinning much slower (which is generally not good to have such imbalance). It is interesting, however, that at the very beginning, all 4 motors are spinning at the same speed (i assume hover), but then the ESC1 starts spinning slower, maybe it was a forward flight, so one motor had a lighter load. But this does not seem to be the case because at 8:55 or so, the roll and pitch are both very close to zero, but you see the ESC1 commanded and actual RPM is much lower. Something to look into!
Alex
-
@restore, I am sorry that it happened to you.. I think that I agree with @ben-grocholsky on the cause of the issue.
In your params, the maximum RPM is 6200 and at hover it looks like the motors spin around 3000rpm. Under simplifying assumptions that thrust = a*rpm^2, it means your vehicle is about 4:1 thrust to weight ratio, which is generally not good for large vehicles because of slow spinning props having light disk loading, will be more unstable at low RPMs.
However, the light loading is not itself the cause of the crash - but as Ben said PX4 thought the vehicle has landed (due to potentially incorrect px4 parameters) and the motors were commanded to stop, as seen here:
Your param for MPC_THR_HOVER is set to 0.34, but actual throttle to hover was below 0.2 it seems. There is some help on configuring these parameters : https://docs.px4.io/main/en/advanced_config/land_detector.html
Also, looking at commanded / actual rpms, you can see that ESC1 RPMs are lower than the others, which could mean that the vehicle's center of mass is not in the center of the vehicle, so one motor is spinning much slower (which is generally not good to have such imbalance). It is interesting, however, that at the very beginning, all 4 motors are spinning at the same speed (i assume hover), but then the ESC1 starts spinning slower, maybe it was a forward flight, so one motor had a lighter load. But this does not seem to be the case because at 8:55 or so, the roll and pitch are both very close to zero, but you see the ESC1 commanded and actual RPM is much lower. Something to look into!
Alex
@Alex-Kushleyev
This was a first flight after a completely new flash. Unfortunately a package install failed and we had to unbrick before we had an opportunity to backup the PX4 params. The hover thrust was still in the process of training. We were also flying light because we've had so many issues with the system that we didn't want to risk the payload until we had confidence in the system. A mock payload weight would have helped here.However that doesn't excuse the awful PX4 programming, not having a catch if the drone starts to fall, a default min xy of 1.5m/s, etc. We've shelved the system and will be using an ardupilot controller until we have time to develop the voxl at a slower pace.
-
@Alex-Kushleyev
This was a first flight after a completely new flash. Unfortunately a package install failed and we had to unbrick before we had an opportunity to backup the PX4 params. The hover thrust was still in the process of training. We were also flying light because we've had so many issues with the system that we didn't want to risk the payload until we had confidence in the system. A mock payload weight would have helped here.However that doesn't excuse the awful PX4 programming, not having a catch if the drone starts to fall, a default min xy of 1.5m/s, etc. We've shelved the system and will be using an ardupilot controller until we have time to develop the voxl at a slower pace.
Hi @Dan-Jennings,
Thanks for sharing your feedback. I understand it must have been a very frustrating incident and you had to make a difficult decision.
We will investigate this behavior in PX4.
Alex
-
Hi @Dan-Jennings,
Thanks for sharing your feedback. I understand it must have been a very frustrating incident and you had to make a difficult decision.
We will investigate this behavior in PX4.
Alex
@restore and @Dan-Jennings , may I have your permission to use / reference the log that you posted (https://review.px4.io/plot_app?log=6ad22692-fe3f-4cce-b8f0-a812d91bfa16) in another public forum (px4 forum / discord). We may need to do some investigation and discuss this with PX4 maintainers. Thanks!
Alex
-
@restore and @Dan-Jennings , may I have your permission to use / reference the log that you posted (https://review.px4.io/plot_app?log=6ad22692-fe3f-4cce-b8f0-a812d91bfa16) in another public forum (px4 forum / discord). We may need to do some investigation and discuss this with PX4 maintainers. Thanks!
Alex

Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login