How to do SLAM and VOXL-Mapper flying with Starling Drone ?
-
We have installed voxl-Mapper and started the services, changed offboard mode to trajectory also. When we tell it to go to one location its moving also. But no point cloud map is been generated inside Mapper at Voxl Web portal. Please assist.!
-
We have installed voxl-Mapper and started the services, changed offboard mode to trajectory also. When we tell it to go to one location its moving also. But no point cloud map is been generated inside Mapper at Voxl Web portal. Please assist.!
@david-devassy Have you been following the documentation here: https://docs.modalai.com/voxl-mapper/#voxl-mapper?
-
@david-devassy Have you been following the documentation here: https://docs.modalai.com/voxl-mapper/#voxl-mapper?
@Eric-Katzfey . Yes, we have followed the same only. i think my TOF sensor is not activated. we are not getting any data of TOF sensors on the VOXL Webportal. Can you Guide me on How to activate it.
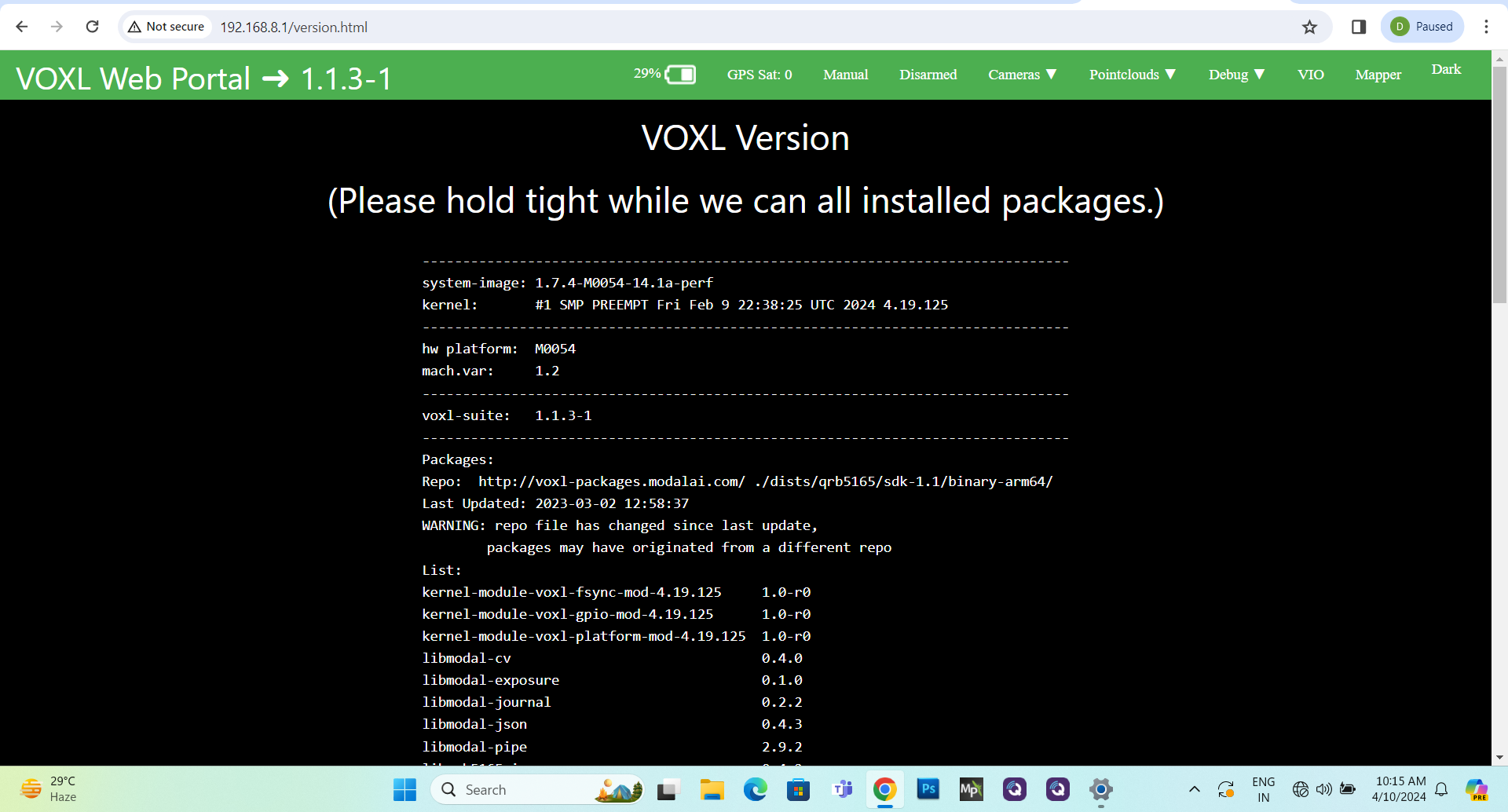
following attached images are the data regarding drone.
-
@Eric-Katzfey . Yes, we have followed the same only. i think my TOF sensor is not activated. we are not getting any data of TOF sensors on the VOXL Webportal. Can you Guide me on How to activate it.
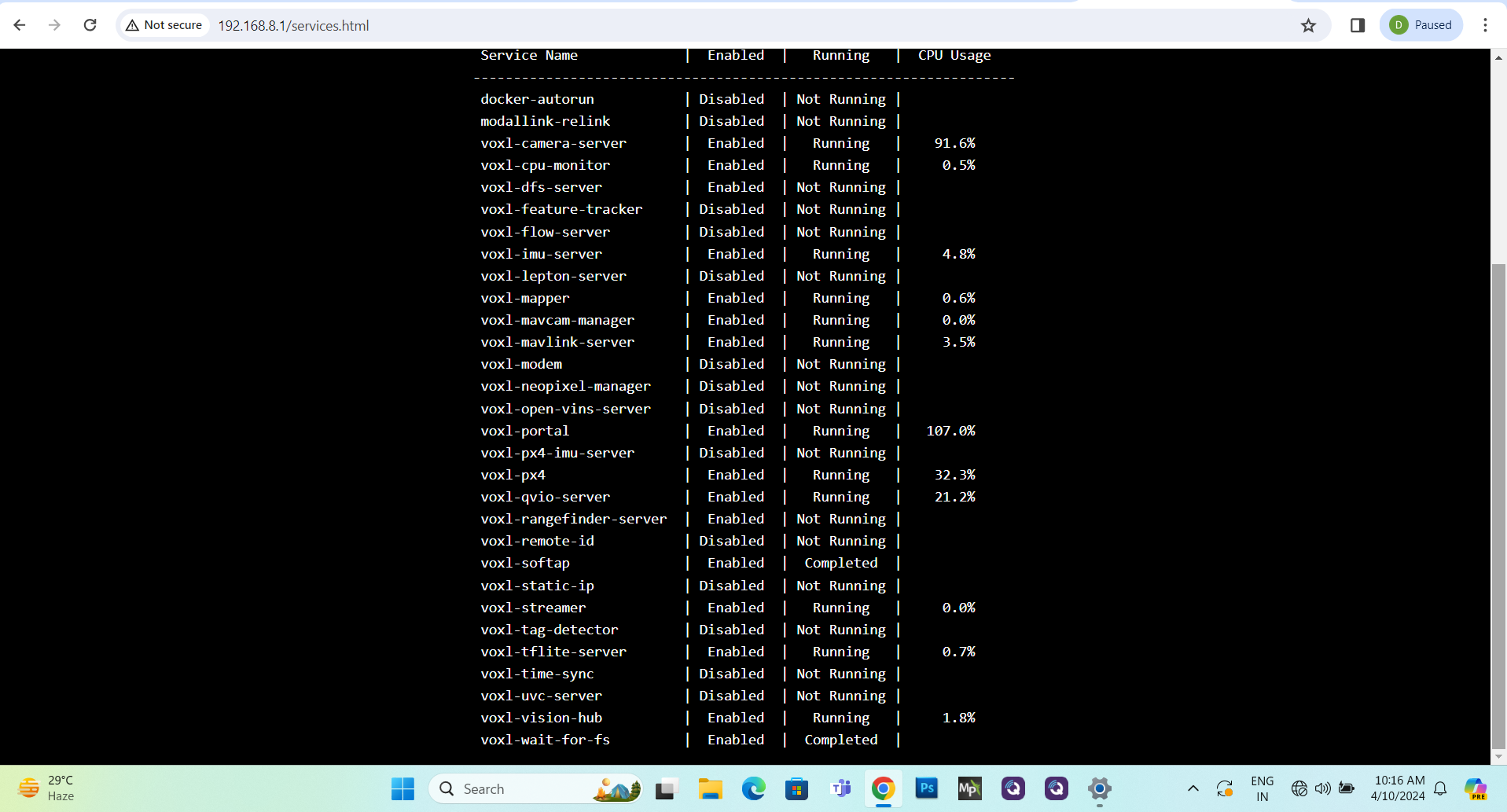
following attached images are the data regarding drone. @david-devassy Did you run through
voxl-configure-sku -wandvoxl-configure-mpain order to enable / run all of the relevant services? -
@david-devassy Did you run through
voxl-configure-sku -wandvoxl-configure-mpain order to enable / run all of the relevant services?@tom ------------------------------------------------------------------
Welcome to the voxl-configure-sku Wizard!VOXL currently thinks it is in the following hardware:
family code: MRB-D0005 (starling)
compute board: 4 (voxl2)
hw version: 3
cam config: 6
SKU: MRB-D0005-4-V3-C6If this is what you want, select 1 (accept and continue) to
leave it as-is. Otherwise, select the desired product family:- accept and continue 10) seeker
- starling 11) rb5-flight
- sentinel 12) flight-deck
- fpv 13) voxl-deck
- D0010 14) voxl2-flight-deck
- px4-autonomy-dev-kit 15) voxl2-test-fixture
- stinger 16) voxl2-mini-test-fixture
- m500 17) voxl2-board-only
- voxlcam 18) voxl2-mini-board-only
#? 2
selected starling
MRB-D0005 Starling currently has two versions in circulation.
Version 2 with silver motors (pre December 2023)
Version 3 with black motors (December 2023 onward)
Please select the appropriate one.- quit
- 2
- 3
#? 3
If you would like to select a special camera config that differs
from the default for your product family, please select an option.
Simply hit ENTER to use the default01 - ov7251 tracking ov7251 stereo
02 - ov7251 tracking
03 - ov7251 tracking ov7251 stereo imx214 hires
04 - ov7251 tracking imx214 hires
05 - pmd-tof ov7251 tracking
06 - D0005 Starling pmd-tof imx214 hires ov7251 tracking
08 - imx214
09 - pmd-tof
10 - ov7251 stereo
11 - D0006 Sentinel
12 - ov9782 stereo
13 - ov9782 stereo imx214 hires
14 - ov9782 stereo pmd-tof ov7251 tracking (copy)
15 - D0008 dual 9782 tracking
16 - pmd-tof ov7251 dual tracking imx214 hires
17 - D0010 pmd-tof imx412 hires ov7251 tracking ov9782 stereo
18 - D0008 triple ov9782
19 - D0005 without tof imx214 hires ov7251 tracking
20 - D0011 imx412 hires ar0144 tracking
21 - old C6
22 - D0013 imx412 flipped ov7251
23 - D0010 without stereo
C - use user-defined custom camera config in
(/data/modalai/custom_camera_config.txt)
q - Quit The WizardThe default camera config for Starling is
6 (hires+TOF+tracking)Simply hit ENTER to use the default
selection:
Selecting default camera configYour answers would construct the following SKU:
family code: MRB-D0005 (starling)
compute board: 4 (voxl2)
hw version: 3
cam config: 6
SKU: MRB-D0005-4-V3-C6This sku will be saved to persistent memory so VOXL
will remember what it is installed in, even between
system image flashes.Press enter to accept and continue.
If something is wrong press ctrl-C to quit and try again.DONE, MRB-D0005-4-V3-C6 has been written to /data/modalai/sku.txt
Next you will likely want to run voxl-configure-mpavoxl2:/$ voxl-configure-mpa
Welcome to voxl-configure-mpa!VOXL is currently thinks it is in the following hardware:
family code: MRB-D0005 (starling)
compute board: 4 (voxl2)
hw version: 3
cam config: 6
SKU: MRB-D0005-4-V3-C6If this doesn't look right, quit and run voxl-configure-sku to
set it correctly. Then run voxl-configure-mpa again.Continue? y/n: y
ContinuingAbout to Execute:
voxl-configure-extrinsics starling_v2_voxl2
voxl-configure-cameras 6
voxl-configure-cpu-monitor factory_enable
voxl-configure-qvio factory_enable_imu_apps
voxl-configure-open-vins disable
voxl-configure-dfs factory_disable
voxl-configure-tag-detector factory_disable
voxl-configure-tflite factory_disable
voxl-configure-vision-hub factory_enable
voxl-configure-mavlink-server factory_enable
voxl-configure-portal enable
voxl-configure-lepton disable
voxl-configure-uvc disable
voxl-configure-streamer factory_enable
voxl-configure-modem disable
voxl-configure-mavcam factory_enable
voxl-configure-rangefinders disable
voxl-configure-px4-imu-server factory_disable
voxl-configure-imu factory_enable
voxl-configure-flow-server disable
voxl-configure-feature-tracker disable
systemctl stop voxl-px4
systemctl disable voxl-px4
sleep 3
voxl-esc setup_starling_black_motors
voxl-elrs --scan
systemctl stop voxl-px4
rm -f /data/px4/param/parameters
voxl-configure-px4 starling_v2
systemctl stop voxl-mavlink-server
sleep 1
voxl-configure-px4-params --non-interactive --platform MRB-D0005-V2enabling voxl-wait-for-fs service
executing: voxl-configure-extrinsics starling_v2_voxl2
wiping old extrinsics config file
copying /usr/share/modalai/extrinsic_configs/starling_v2_voxl2.conf to /etc/modalai/extrinsics.conf
loading and updating file with voxl-inspect-extrinsics -q
done configuring extrinsics
Success!executing: voxl-configure-cameras 6
Camera Configuration: 6camera server config helper list:
tof:pmd-tof:0:
hires:imx214:1:
tracking:ov7251:2:driver binary list:
/usr/share/modalai/chi-cdk/irs1645/com.qti.sensormodule.irs1645_0.bin
/usr/share/modalai/chi-cdk/imx214/com.qti.sensormodule.imx214_2.bin
/usr/share/modalai/chi-cdk/ov7251/com.qti.sensormodule.ov7251_3.bincalling camera-server-config-helper tof:pmd-tof:0: hires:imx214:1: tracking:ov7251:2:
detected system image 1.7.4
using new imx214 defaults
successfully wrote this camera config to disk:configuration for 3 cameras:
cam #0
name: tof
sensor type: pmd-tof
isEnabled: 1
camId: 0
camId2: -1
fps: 5
en_rotate: 0
en_rotate2: 0en_preview: 1 pre_width: 224 pre_height: 1557 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_snapshot: 0 snap_width: -1 snap_height: -1 ae_mode: off standby_enabled: 0 decimator: 5 independent_exposure:0cam #1
name: hires
sensor type: imx214
isEnabled: 1
camId: 1
camId2: -1
fps: 30
en_rotate: 0
en_rotate2: 0en_preview: 0 pre_width: 640 pre_height: 480 en_raw_preview: 0 en_small_video: 1 small_video_width: 1024 small_video_height: 768 en_large_video: 1 large_video_width: 4208 large_video_height: 3120 en_snapshot: 1 snap_width: 4208 snap_height: 3120 ae_mode: isp standby_enabled: 0 decimator: 1 independent_exposure:0cam #2
name: tracking
sensor type: ov7251
isEnabled: 1
camId: 2
camId2: -1
fps: 30
en_rotate: 0
en_rotate2: 0en_preview: 1 pre_width: 640 pre_height: 480 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_snapshot: 0 snap_width: -1 snap_height: -1 ae_mode: lme_msv standby_enabled: 0 decimator: 1 independent_exposure:0=================================================================
camera_server_config_helper is done
copying required camera drivers in place
/usr/share/modalai/chi-cdk/irs1645/com.qti.sensormodule.irs1645_0.bin
/usr/share/modalai/chi-cdk/imx214/com.qti.sensormodule.imx214_2.bin
/usr/share/modalai/chi-cdk/ov7251/com.qti.sensormodule.ov7251_3.bin
enabling voxl-camera-server
Done Configuring Cameras
Please power cycle VOXL to load new drivers
camera server will start on next rebootSuccess!
executing: voxl-configure-cpu-monitor factory_enable
wiping old config file
Creating new config file: /etc/modalai/voxl-cpu-monitor.conf
enabling voxl-cpu-monitor systemd service
Done configuring voxl-cpu-monitor
Success!executing: voxl-configure-qvio factory_enable_imu_apps
wiping old config file
loading config file
Creating new config file: /etc/modalai/voxl-qvio-server.conf
enabling voxl-qvio-server systemd service
Done configuring voxl-qvio-server
Success!executing: voxl-configure-open-vins disable
disabling voxl-open-vins-server systemd service
stopping voxl-open-vins-server systemd service
Done configuring voxl-open-vins-server
Success!executing: voxl-configure-dfs factory_disable
wiping old config file
Creating new config file: /etc/modalai/voxl-dfs-server.conf
disabling voxl-dfs-server systemd service
Removed /etc/systemd/system/multi-user.target.wants/voxl-dfs-server.service.
stopping voxl-dfs-server systemd service
Done configuring voxl-dfs-server
Success!executing: voxl-configure-tag-detector factory_disable
wiping old config file
Creating new config file: /etc/modalai/voxl-tag-detector.conf
disabling voxl-tag-detector systemd service
stopping voxl-tag-detector systemd service
Done configuring voxl-tag-detector
Success!executing: voxl-configure-tflite factory_disable
wiping old config file
Creating new config file: /etc/modalai/voxl-tflite-server.conf
The config file was modified during parsing, saving the changes to disk
disabling voxl-tflite-server systemd service
Removed /etc/systemd/system/multi-user.target.wants/voxl-tflite-server.service.
stopping voxl-tflite-server systemd service
Done configuring voxl-tflite-server
Success!executing: voxl-configure-vision-hub factory_enable
wiping old config file
Created new json file: /etc/modalai/voxl-vision-hub.conf
The JSON config file data was modified during parsing, saving the changes to disk
enabling voxl-vision-hub systemd service
Done configuring voxl-vision-hub
service will start on next reboot
Success!executing: voxl-configure-mavlink-server factory_enable
wiping old config file
Created new json file: /etc/modalai/voxl-mavlink-server.conf
enabling voxl-mavlink-server systemd service
Done configuring voxl-mavlink-server
Success!executing: voxl-configure-portal enable
enabling voxl-portal systemd service
Done configuring voxl-portal
Success!executing: voxl-configure-lepton disable
disabling voxl-lepton-server systemd service
stopping voxl-lepton-server systemd service
Done configuring voxl-lepton-server
Success!executing: voxl-configure-uvc disable
disabling voxl-uvc-server systemd service
stopping voxl-uvc-server systemd service
Done configuring voxl-uvc-server
Success!executing: voxl-configure-streamer factory_enable
wiping old config file
Creating new config file: /etc/modalai/voxl-streamer.conf
writing /etc/modalai/voxl-streamer.conf to disk
parsed config file
enabling voxl-streamer systemd service
Done configuring voxl-streamer, it will start on next reboot
Success!executing: voxl-configure-modem disable
disabling voxl-modem systemd service
stopping voxl-modem systemd service
Done configuring voxl-modem
Success!executing: voxl-configure-mavcam factory_enable
Creating new config file: /etc/modalai/voxl-mavcam-manager.conf
writing /etc/modalai/voxl-mavcam-manager.conf to disk
enabling voxl-mavcam-manager systemd service
Done configuring voxl-mavcam-manager
It will start automatically on the next reboot
Success!executing: voxl-configure-rangefinders disable
disabling voxl-rangefinder-server systemd service
Removed /etc/systemd/system/multi-user.target.wants/voxl-rangefinder-server.service.
stopping voxl-rangefinder-server systemd service
Done configuring voxl-rangefinder-server
Success!executing: voxl-configure-px4-imu-server factory_disable
disabling voxl-px4-imu-server systemd service
stopping voxl-px4-imu-server systemd service
Done configuring voxl-px4-imu-server
Success!executing: voxl-configure-imu factory_enable
wiping old config file
Creating new config file: /etc/modalai/voxl-imu-server.conf
enabling voxl-imu-server systemd service
Done configuring voxl-imu-server
Success!executing: voxl-configure-flow-server disable
disabling voxl-flow-server systemd service
stopping voxl-flow-server systemd service
Done configuring voxl-flow-server
Success!executing: voxl-configure-feature-tracker disable
disabling voxl-feature-tracker systemd service
stopping voxl-feature-tracker systemd service
Done configuring voxl-feature-tracker
Success!executing: systemctl stop voxl-px4
Success!executing: systemctl disable voxl-px4
Removed /etc/systemd/system/multi-user.target.wants/voxl-px4.service.
Success!executing: sleep 3
Success!executing: voxl-esc setup_starling_black_motors
enabling bridge
bridge enabled
[INFO] Setting CPU to performance mode
[INFO] Scanning for ESC...
dpkg-query: no packages found matching voxl-esc-board-detect.py
dpkg-query: no packages found matching voxl-esc-calibrate.py
dpkg-query: no packages found matching voxl-esc-led.py
dpkg-query: no packages found matching voxl-esc-neopixel-test.py
dpkg-query: no packages found matching voxl-esc-scan.py
dpkg-query: no packages found matching voxl-esc-spin-helper.sh
dpkg-query: no packages found matching voxl-esc-spin-sine.py
dpkg-query: no packages found matching voxl-esc-spin-step.py
dpkg-query: no packages found matching voxl-esc-spin.py
dpkg-query: no packages found matching voxl-esc-tools-bin
dpkg-query: no packages found matching voxl-esc-upload-firmware-all.sh
dpkg-query: no packages found matching voxl-esc-upload-firmware.py
dpkg-query: no packages found matching voxl-esc-upload-params.py
dpkg-query: no packages found matching voxl-esc-verify-params.py
dpkg-query: no packages found matching voxl_esc_setup_paths.py
dpkg-query: no packages found matching voxl_serial.py
[INFO] M0134-1 detected
[INFO] has for most recent firmware: eb6fb500
[INFO] Expected ESC firmware info:
Firmware: modalai_esc_firmware_m0134_1_v0_39_RC10_eb6fb500.bin
Firmware hash: eb6fb500[INFO] Number of ESCs with correct FW: 4
[INFO] All of the ESCs have the correct firmware loaded
uploading params file ../voxl-esc-params/starling_1504_3000kv/starling_1504_3000kv.xml
Detected Python version : 3.6.9 (default, Mar 10 2023, 16:46:00)
[GCC 8.4.0]
dpkg-query: no packages found matching voxl-esc-board-detect.py
dpkg-query: no packages found matching voxl-esc-calibrate.py
dpkg-query: no packages found matching voxl-esc-led.py
dpkg-query: no packages found matching voxl-esc-neopixel-test.py
dpkg-query: no packages found matching voxl-esc-scan.py
dpkg-query: no packages found matching voxl-esc-spin-helper.sh
dpkg-query: no packages found matching voxl-esc-spin-sine.py
dpkg-query: no packages found matching voxl-esc-spin-step.py
dpkg-query: no packages found matching voxl-esc-spin.py
dpkg-query: no packages found matching voxl-esc-tools-bin
dpkg-query: no packages found matching voxl-esc-upload-firmware-all.sh
dpkg-query: no packages found matching voxl-esc-upload-firmware.py
dpkg-query: no packages found matching voxl-esc-upload-params.py
dpkg-query: no packages found matching voxl-esc-verify-params.py
dpkg-query: no packages found matching voxl_esc_setup_paths.py
dpkg-query: no packages found matching voxl_serial.py
Found voxl-esc tools bin version: 1.6
VOXL Platform: M0054
Detected RB5 Flight, VOXL2 M0054 or M0104!
INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000
Sending library name request: libslpi_qrb5165_io.so
Sending initialization request
INFO: ESC(s) detected on port: /dev/slpi-uart-2, baud rate: 2000000, protocol: firmwareINFO: ESC Information:
INFO: ---------------------
ID : 0
Board : version 37: ModalAi 4-in-1 ESC (M0134-1)
UID : 0x2033303852465719003E0056
Firmware : version 39, hash eb6fb500
Bootloader : version 183, hash b4fa2cf8ID : 1 Board : version 37: ModalAi 4-in-1 ESC (M0134-1) UID : 0x20333038524657190026004F Firmware : version 39, hash eb6fb500 Bootloader : version 183, hash b4fa2cf8 ID : 2 Board : version 37: ModalAi 4-in-1 ESC (M0134-1) UID : 0x203330385246571900260049 Firmware : version 39, hash eb6fb500 Bootloader : version 183, hash b4fa2cf8 ID : 3 Board : version 37: ModalAi 4-in-1 ESC (M0134-1) UID : 0x2033303852465718001C002B Firmware : version 39, hash eb6fb500 Bootloader : version 183, hash b4fa2cf8
successfully pinged ESCs
Detected Python version : 3.6.9 (default, Mar 10 2023, 16:46:00)
[GCC 8.4.0]
dpkg-query: no packages found matching voxl-esc-board-detect.py
dpkg-query: no packages found matching voxl-esc-calibrate.py
dpkg-query: no packages found matching voxl-esc-led.py
dpkg-query: no packages found matching voxl-esc-neopixel-test.py
dpkg-query: no packages found matching voxl-esc-scan.py
dpkg-query: no packages found matching voxl-esc-spin-helper.sh
dpkg-query: no packages found matching voxl-esc-spin-sine.py
dpkg-query: no packages found matching voxl-esc-spin-step.py
dpkg-query: no packages found matching voxl-esc-spin.py
dpkg-query: no packages found matching voxl-esc-tools-bin
dpkg-query: no packages found matching voxl-esc-upload-firmware-all.sh
dpkg-query: no packages found matching voxl-esc-upload-firmware.py
dpkg-query: no packages found matching voxl-esc-upload-params.py
dpkg-query: no packages found matching voxl-esc-verify-params.py
dpkg-query: no packages found matching voxl_esc_setup_paths.py
dpkg-query: no packages found matching voxl_serial.py
Found voxl-esc tools bin version: 1.6INFO: Params file name : ../voxl-esc-params/starling_1504_3000kv/starling_1504_3000kv.xml
INFO: Params file size : 7602 bytesSTILL SAME. WE THINK OUR TOF UNIT IS NOT WORKING. ITS DEAD ON ARRIVAL.
-
@david-devassy Did you run through
voxl-configure-sku -wandvoxl-configure-mpain order to enable / run all of the relevant services?@tom
VOXL Platform: M0054
Detected RB5 Flight, VOXL2 M0054 or M0104!
INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000
Sending library name request: libslpi_qrb5165_io.so
Sending initialization request
INFO: ESC(s) detected on port: /dev/slpi-uart-2, baud rate: 2000000
INFO: ESCs detected:
INFO: ---------------------
ID: 0, SW: 39, HW: 37: ModalAi 4-in-1 ESC (M0134-1)
ID: 1, SW: 39, HW: 37: ModalAi 4-in-1 ESC (M0134-1)
ID: 2, SW: 39, HW: 37: ModalAi 4-in-1 ESC (M0134-1)
ID: 3, SW: 39, HW: 37: ModalAi 4-in-1 ESC (M0134-1)INFO: Loading XML config file...
INFO: Uploading params for ESC ID 255...
-- board config
-- id config
-- uart config
-- tune config
DONE
INFO: Resetting ESCs...
DONE
WARNING: Received 12 bytes of data from SLPI while SLPI uart not in use (topic uart_data)
disabling bridge
bridge disabled
Success!executing: voxl-elrs --scan
[ERROR] Error reading device information.
[ERROR] Ensure that transmitter is turned off and receiver is not in bootloader mode.
first try failed, executing a second time: voxl-elrs --scan
[ERROR] Error reading device information.
[ERROR] Ensure that transmitter is turned off and receiver is not in bootloader mode.
FAILED TO EXECUTE: voxl-elrs --scanexecuting: systemctl stop voxl-px4
Success!executing: rm -f /data/px4/param/parameters
Success!executing: voxl-configure-px4 starling_v2
wiping old config file
enabling voxl-px4 systemd service
Created symlink /etc/systemd/system/multi-user.target.wants/voxl-px4.service → /etc/systemd/system/voxl-px4.service.
Done configuring voxl-px4
Success!executing: systemctl stop voxl-mavlink-server
Success!executing: sleep 1
Success!executing: voxl-configure-px4-params --non-interactive --platform MRB-D0005-V2
[INFO] Voxl-px4 not currently running.
[INFO] Starting voxl-px4 service...
[INFO] Voxl-px4 started successfully!
[INFO] Loading the following param files: platforms/Starling_V2.params, EKF2_helpers/indoor_vio.params, radio_helpers/Commando_8.params.[INFO] Loading file: /usr/share/modalai/px4_params/v1.14/platforms/Starling_V2.params
[INFO] Scanning currently loaded parameters...
The following parameters about to be loaded differ from those currently loaded:
NAME CURRENT NEW
[1] CBRK_IO_SAFETY N/A 22027
[2] COM_CPU_MAX 0.0 -1.0
[3] COM_OF_LOSS_T N/A 3.0
[4] NAV_ACC_RAD N/A 2.0
[5] GPS_UBX_DYNMODEL N/A 6
[6] RTL_RETURN_ALT N/A 30
[7] RTL_DESCEND_ALT N/A 10
[8] SENS_BOARD_ROT N/A 0
[9] BAT1_N_CELLS N/A 2
[10] BAT1_R_INTERNAL N/A 0.025
[11] BAT1_CAPACITY N/A 2900
[12] BAT1_V_CHARGED N/A 4.1
[13] BAT1_V_EMPTY N/A 3.2
[14] BAT_LOW_THR N/A 0.15
[15] BAT_CRIT_THR N/A 0.10
[16] BAT_EMERGEN_THR N/A 0.05
[17] MPC_THR_HOVER 0.42 0.34
[18] THR_MDL_FAC N/A 0.9
[19] VOXL_ESC_RPM_MAX 10500.0 15000.0
[20] VOXL_ESC_RPM_MIN 1000.0 3000.0
[21] VOXL_ESC_FUNC2 103.0 104.0
[22] VOXL_ESC_FUNC3 104.0 102.0
[23] VOXL_ESC_FUNC4 102.0 103.0
[24] VOXL_ESC_T_COSP N/A 0.990000009536743164
[25] VOXL_ESC_T_DEAD N/A 20
[26] VOXL_ESC_T_EXPO N/A 35
[27] VOXL_ESC_T_MINF N/A 0.150000005960464478
[28] VOXL_ESC_T_PERC N/A 90
[29] VOXL_ESC_VLOG N/A 1
[30] MC_BAT_SCALE_EN N/A 0
[31] EKF2_IMU_POS_X 0.027 0.0157
[32] EKF2_IMU_POS_Y 0.009 0.0078
[33] EKF2_IMU_POS_Z -0.019 -0.018
[34] EKF2_EV_POS_X N/A 0.0
[35] EKF2_EV_POS_Y N/A 0.0
[36] EKF2_EV_POS_Z N/A 0.0
[37] CA_ROTOR0_PX 0.15 0.085
[38] CA_ROTOR0_PY 0.15 0.0625
[39] CA_ROTOR1_PX -0.15 -0.085
[40] CA_ROTOR1_PY -0.15 -0.0625
[41] CA_ROTOR2_PX 0.15 0.085
[42] CA_ROTOR2_PY -0.15 -0.0625
[43] CA_ROTOR3_PX -0.15 -0.085
[44] CA_ROTOR3_PY 0.15 0.0625
[45] CA_ROTOR0_AX N/A 0.0
[46] CA_ROTOR0_AY N/A 0.0
[47] CA_ROTOR1_AX N/A 0.0
[48] CA_ROTOR1_AY N/A 0.0
[49] CA_ROTOR2_AX N/A 0.0
[50] CA_ROTOR2_AY N/A 0.0
[51] CA_ROTOR3_AX N/A 0.0
[52] CA_ROTOR3_AY N/A 0.0
[53] CA_ROTOR0_KM N/A 0.05
[54] CA_ROTOR1_KM N/A 0.05
[55] MOT_SLEW_MAX N/A 0.0
[56] IMU_DGYRO_CUTOFF N/A 60.0
[57] IMU_ACCEL_CUTOFF N/A 80.0
[58] IMU_GYRO_CUTOFF N/A 80.0
[59] IMU_GYRO_DNF_EN N/A 1
[60] IMU_GYRO_DNF_HMC N/A 3
[61] IMU_GYRO_DNF_BW N/A 15
[62] MC_PITCH_P 5.5 16.0
[63] MC_PITCHRATE_P 0.08 0.12
[64] MC_PITCHRATE_I 0.2 0.05
[65] MC_PITCHRATE_D 0.0013 0.0015
[66] MC_PITCH_CUTOFF N/A 150.0
[67] MC_ROLL_P 5.5 16.0
[68] MC_ROLLRATE_P 0.08 0.09
[69] MC_ROLLRATE_I 0.2 0.05
[70] MC_ROLLRATE_D 0.0013 0.0015
[71] MC_ROLL_CUTOFF N/A 150.0
[72] MC_YAW_P 2.0 2.8
[73] MC_YAWRATE_I 0.1 0.5
[74] MC_YAW_CUTOFF N/A 150.0
[75] MC_ROLLRATE_MAX N/A 130.0
[76] MC_PITCHRATE_MAX N/A 130.0
[77] MC_YAWRATE_MAX N/A 150.0
[78] MPC_POS_MODE 0.0 4.0
[79] MPC_YAW_EXPO 0.2 0.3
[80] MPC_XY_MAN_EXPO 0.2 0.45
[81] MPC_Z_MAN_EXPO 0.2 0.1
[82] MPC_ACC_HOR N/A 3.0
[83] MPC_JERK_MAX N/A 40.0
[84] MPC_TILTMAX_AIR N/A 30.0
[85] MPC_ACC_HOR_MAX N/A 1000.0
[86] MPC_ACC_UP_MAX N/A 3.0
[87] MPC_ACC_DOWN_MAX N/A 3.0
[88] MPC_VEL_MANUAL 5.0 3.0
[89] MPC_XY_VEL_MAX 5.0 3.0
[90] MPC_XY_CRUISE 5.0 3.0
[91] MPC_Z_VEL_MAX_DN 1.5 1.0
[92] MPC_Z_VEL_MAX_UP 4.0 1.0
[93] MPC_HOLD_MAX_XY N/A 0.0
[94] MPC_HOLD_MAX_Z N/A 0.0
[95] MPC_THR_MAX 0.75 0.7
[96] MPC_MANTHR_MIN 0.05 0.08
[97] MPC_XY_P 0.95 3.5
[98] MPC_Z_P 1.0 5.0
[99] MPC_TKO_RAMP_T 1.5 1.0
[100] COM_SPOOLUP_TIME N/A 2.0
[101] LNDMC_ROT_MAX N/A 30.0
[102] LNDMC_TRIG_TIME N/A 0.5
[103] COM_DISARM_LAND N/A 0.1
[104] COM_DISARM_PRFLT -1.0 20.0[INFO] Setting params...
[ERROR] Failed to set PX4 parameters. Check voxl-px4 status for details.
first try failed, executing a second time: voxl-configure-px4-params --non-interactive --platform MRB-D0005-V2
[INFO] Voxl-px4 service found and active.
[INFO] Loading the following param files: platforms/Starling_V2.params, EKF2_helpers/indoor_vio.params, radio_helpers/Commando_8.params.[INFO] Loading file: /usr/share/modalai/px4_params/v1.14/platforms/Starling_V2.params
[INFO] Scanning currently loaded parameters...
The following parameters about to be loaded differ from those currently loaded:
NAME CURRENT NEW
[1] CBRK_IO_SAFETY N/A 22027
[2] CBRK_SUPPLY_CHK N/A 894281
[3] COM_CPU_MAX N/A -1
[4] COM_OF_LOSS_T N/A 3.0
[5] NAV_ACC_RAD N/A 2.0
[6] GPS_UBX_DYNMODEL N/A 6
[7] RTL_RETURN_ALT N/A 30
[8] RTL_DESCEND_ALT N/A 10
[9] IMU_GYRO_RATEMAX N/A 800
[10] SYS_AUTOSTART N/A 4001
[11] MAV_TYPE N/A 2
[12] SENS_BOARD_ROT N/A 0
[13] BAT1_N_CELLS N/A 2
[14] BAT1_R_INTERNAL N/A 0.025
[15] BAT1_CAPACITY N/A 2900
[16] BAT1_V_CHARGED N/A 4.1
[17] BAT1_V_EMPTY N/A 3.2
[18] BAT_LOW_THR N/A 0.15
[19] BAT_CRIT_THR N/A 0.10
[20] BAT_EMERGEN_THR N/A 0.05
[21] MPC_THR_HOVER N/A 0.34
[22] THR_MDL_FAC N/A 0.9
[23] VOXL_ESC_FUNC1 N/A 101
[24] VOXL_ESC_FUNC2 103.0 104.0
[25] VOXL_ESC_FUNC3 104.0 102.0
[26] VOXL_ESC_FUNC4 102.0 103.0
[27] VOXL_ESC_SDIR1 N/A 0
[28] VOXL_ESC_SDIR2 N/A 0
[29] VOXL_ESC_SDIR3 N/A 0
[30] VOXL_ESC_SDIR4 N/A 0
[31] VOXL_ESC_BAUD N/A 2000000
[32] VOXL_ESC_CONFIG N/A 1
[33] VOXL_ESC_MODE N/A 0
[34] VOXL_ESC_REV N/A 0
[35] CA_AIRFRAME N/A 0
[36] CA_ROTOR_COUNT N/A 4
[37] CA_ROTOR2_KM N/A -0.05
[38] CA_ROTOR3_KM N/A -0.05
[39] MC_AIRMODE N/A 0
[40] MC_PITCHRATE_K N/A 1.0
[41] MC_ROLLRATE_K N/A 1.0
[42] MC_YAWRATE_P N/A 0.15
[43] MC_YAWRATE_D N/A 0.0
[44] MC_YAWRATE_K N/A 1.0
[45] MPC_LAND_SPEED N/A 1.0
[46] MPC_THR_MIN N/A 0.08
[47] MPC_XY_VEL_P_ACC N/A 3.00
[48] MPC_XY_VEL_I_ACC N/A 0.10
[49] MPC_XY_VEL_D_ACC N/A 0.00
[50] MPC_Z_VEL_P_ACC N/A 8.0
[51] MPC_Z_VEL_I_ACC N/A 2.0
[52] MPC_Z_VEL_D_ACC N/A 0.0
[53] MPC_TKO_SPEED N/A 1.50[INFO] Setting params...
[INFO] PX4 parameter configuration successful![INFO] Loading file: /usr/share/modalai/px4_params/v1.14/EKF2_helpers/indoor_vio.params
[INFO] Scanning currently loaded parameters...
The following parameters about to be loaded differ from those currently loaded:
NAME CURRENT NEW
[1] SYS_HAS_MAG N/A 1
[2] SYS_HAS_GPS N/A 1
[3] COM_ARM_WO_GPS N/A 1
[4] EKF2_GPS_CTRL N/A 0
[5] EKF2_MAG_TYPE N/A 5
[6] EKF2_BARO_CTRL N/A 1
[7] EKF2_EV_CTRL N/A 15
[8] EKF2_OF_CTRL N/A 0
[9] EKF2_RNG_CTRL N/A 0
[10] EKF2_HGT_REF N/A 3
[11] EKF2_EV_QMIN N/A 1
[12] EKF2_EV_NOISE_MD N/A 0
[13] EKF2_EVA_NOISE N/A 0.1
[14] EKF2_EVP_GATE N/A 5.0
[15] EKF2_EVP_NOISE N/A 0.1
[16] EKF2_EVV_GATE N/A 3.0
[17] EKF2_EVV_NOISE N/A 0.1
[18] EKF2_EV_DELAY N/A 0.00[INFO] Setting params...
[INFO] PX4 parameter configuration successful![INFO] Loading file: /usr/share/modalai/px4_params/v1.14/radio_helpers/Commando_8.params
[INFO] Scanning currently loaded parameters...
The following parameters about to be loaded differ from those currently loaded:
NAME CURRENT NEW
[1] RC_CHAN_CNT N/A 16
[2] RC_MAP_KILL_SW N/A 5
[3] RC_MAP_FLTMODE N/A 6
[4] COM_FLTMODE1 N/A 0
[5] COM_FLTMODE2 N/A -1
[6] COM_FLTMODE3 N/A -1
[7] COM_FLTMODE4 N/A 2
[8] COM_FLTMODE5 N/A -1
[9] COM_FLTMODE6 N/A 7
[10] RC1_DZ N/A 10.000000000000000000
[11] RC1_MAX N/A 2000.000000000000000000
[12] RC1_MIN N/A 1000.000000000000000000
[13] RC1_REV N/A 1.000000000000000000
[14] RC1_TRIM N/A 1500.000000000000000000
[15] RC2_DZ N/A 10.000000000000000000
[16] RC2_MAX N/A 2000.000000000000000000
[17] RC2_MIN N/A 1000.000000000000000000
[18] RC2_REV N/A 1.000000000000000000
[19] RC2_TRIM N/A 1500.000000000000000000
[20] RC3_DZ N/A 10.000000000000000000
[21] RC3_MAX N/A 2000.000000000000000000
[22] RC3_MIN N/A 1000.000000000000000000
[23] RC3_REV N/A 1.000000000000000000
[24] RC3_TRIM N/A 1500.000000000000000000
[25] RC4_DZ N/A 10.000000000000000000
[26] RC4_MAX N/A 2000.000000000000000000
[27] RC4_MIN N/A 1000.000000000000000000
[28] RC4_REV N/A 1.000000000000000000
[29] RC4_TRIM N/A 1500.000000000000000000
[30] RC5_DZ N/A 10.000000000000000000
[31] RC5_MAX N/A 1988.000000000000000000
[32] RC5_MIN N/A 1011.000000000000000000
[33] RC5_REV N/A 1.000000000000000000
[34] RC5_TRIM N/A 1500.000000000000000000
[35] RC6_DZ N/A 10.000000000000000000
[36] RC6_MAX N/A 1988.000000000000000000
[37] RC6_MIN N/A 1011.000000000000000000
[38] RC6_REV N/A 1.000000000000000000
[39] RC6_TRIM N/A 1500.000000000000000000
[40] RC7_DZ N/A 10.000000000000000000
[41] RC7_MAX N/A 1988.000000000000000000
[42] RC7_MIN N/A 1011.000000000000000000
[43] RC7_REV N/A 1.000000000000000000
[44] RC7_TRIM N/A 1500.000000000000000000
[45] RC8_DZ N/A 10.000000000000000000
[46] RC8_MAX N/A 1988.000000000000000000
[47] RC8_MIN N/A 1011.000000000000000000
[48] RC8_REV N/A 1.000000000000000000
[49] RC8_TRIM N/A 1500.000000000000000000
[50] RC9_DZ N/A 0.000000000000000000
[51] RC9_MAX N/A 2000.000000000000000000
[52] RC9_MIN N/A 1000.000000000000000000
[53] RC9_REV N/A 1.000000000000000000
[54] RC9_TRIM N/A 1500.000000000000000000
[55] RC10_DZ N/A 0.000000000000000000
[56] RC10_MAX N/A 2000.000000000000000000
[57] RC10_MIN N/A 1000.000000000000000000
[58] RC10_REV N/A 1.000000000000000000
[59] RC10_TRIM N/A 1500.000000000000000000
[60] RC11_DZ N/A 0.000000000000000000
[61] RC11_MAX N/A 2000.000000000000000000
[62] RC11_MIN N/A 1000.000000000000000000
[63] RC11_REV N/A 1.000000000000000000
[64] RC11_TRIM N/A 1500.000000000000000000
[65] RC12_DZ N/A 0.000000000000000000
[66] RC12_MAX N/A 1988.000000000000000000
[67] RC12_MIN N/A 1011.000000000000000000
[68] RC12_REV N/A 1.000000000000000000
[69] RC12_TRIM N/A 1499.000000000000000000
[70] RC13_DZ N/A 0.000000000000000000
[71] RC13_MAX N/A 2000.000000000000000000
[72] RC13_MIN N/A 1000.000000000000000000
[73] RC13_REV N/A 1.000000000000000000
[74] RC13_TRIM N/A 1500.000000000000000000
[75] RC14_DZ N/A 0.000000000000000000
[76] RC14_MAX N/A 2000.000000000000000000
[77] RC14_MIN N/A 1000.000000000000000000
[78] RC14_REV N/A 1.000000000000000000
[79] RC14_TRIM N/A 1500.000000000000000000
[80] RC15_DZ N/A 0.000000000000000000
[81] RC15_MAX N/A 2000.000000000000000000
[82] RC15_MIN N/A 1000.000000000000000000
[83] RC15_REV N/A 1.000000000000000000
[84] RC15_TRIM N/A 1500.000000000000000000
[85] RC16_DZ N/A 0.000000000000000000
[86] RC16_MAX N/A 2000.000000000000000000
[87] RC16_MIN N/A 1000.000000000000000000
[88] RC16_REV N/A 1.000000000000000000
[89] RC16_TRIM N/A 1500.000000000000000000
[90] RC17_DZ N/A 0.000000000000000000
[91] RC17_MAX N/A 2000.000000000000000000
[92] RC17_MIN N/A 1000.000000000000000000
[93] RC17_REV N/A 1.000000000000000000
[94] RC17_TRIM N/A 1500.000000000000000000
[95] RC18_DZ N/A 0.000000000000000000
[96] RC18_MAX N/A 2000.000000000000000000
[97] RC18_MIN N/A 1000.000000000000000000
[98] RC18_REV N/A 1.000000000000000000
[99] RC18_TRIM N/A 1500.000000000000000000
[100] RC_MAP_ACRO_SW N/A 0
[101] RC_MAP_ARM_SW N/A 0
[102] RC_MAP_AUX1 N/A 0
[103] RC_MAP_AUX2 N/A 0
[104] RC_MAP_AUX3 N/A 0
[105] RC_MAP_AUX4 N/A 0
[106] RC_MAP_AUX5 N/A 0
[107] RC_MAP_AUX6 N/A 0
[108] RC_MAP_FAILSAFE N/A 0
[109] RC_MAP_FLAPS N/A 0
[110] RC_MAP_GEAR_SW N/A 0
[111] RC_MAP_LOITER_SW N/A 0
[112] RC_MAP_MAN_SW N/A 0
[113] RC_MAP_MODE_SW N/A 0
[114] RC_MAP_OFFB_SW N/A 0
[115] RC_MAP_PARAM1 N/A 0
[116] RC_MAP_PARAM2 N/A 0
[117] RC_MAP_PARAM3 N/A 0
[118] RC_MAP_PITCH N/A 2
[119] RC_MAP_POSCTL_SW N/A 0
[120] RC_MAP_RATT_SW N/A 0
[121] RC_MAP_RETURN_SW N/A 0
[122] RC_MAP_ROLL N/A 1
[123] RC_MAP_STAB_SW N/A 0
[124] RC_MAP_THROTTLE N/A 3
[125] RC_MAP_TRANS_SW N/A 0
[126] RC_MAP_YAW N/A 4[INFO] Setting params...
[INFO] PX4 parameter configuration successful![INFO] Loading file: /data/px4/param/parameters_gyro.cal
[INFO] Scanning currently loaded parameters...
The following parameters about to be loaded differ from those currently loaded:
NAME CURRENT NEW
[1] CAL_GYRO0_ID N/A 2490378
[2] CAL_GYRO0_PRIO N/A 50
[3] CAL_GYRO0_XOFF N/A 0.0134728
[4] CAL_GYRO0_YOFF N/A -0.00290391
[5] CAL_GYRO0_ZOFF N/A -0.000202846
[6] CAL_GYRO0_ROT N/A -1[INFO] Setting params...
[INFO] PX4 parameter configuration successful!
[INFO] Trimming duplicate parameters...[INFO] Loading file: /data/px4/param/parameters_acc.cal
[INFO] Scanning currently loaded parameters...
The following parameters about to be loaded differ from those currently loaded:
NAME CURRENT NEW
[1] CAL_ACC0_ID N/A 2490378
[2] CAL_ACC0_PRIO N/A 50
[3] CAL_ACC0_XOFF N/A 0.016479
[4] CAL_ACC0_YOFF N/A 0.0495152
[5] CAL_ACC0_ZOFF N/A -0.00822353
[6] CAL_ACC0_XSCALE N/A 1
[7] CAL_ACC0_YSCALE N/A 1
[8] CAL_ACC0_ZSCALE N/A 1
[9] CAL_ACC0_ROT N/A -1[INFO] Setting params...
[INFO] PX4 parameter configuration successful!
[INFO] Trimming duplicate parameters...[INFO] Loading file: /data/px4/param/parameters_level.cal
[INFO] Scanning currently loaded parameters...
The following parameters about to be loaded differ from those currently loaded:
NAME CURRENT NEW
[1] SENS_BOARD_X_OFF N/A 0.0105941
[2] SENS_BOARD_Y_OFF N/A 0.00175017[INFO] Setting params...
[INFO] PX4 parameter configuration successful!
[INFO] Trimming duplicate parameters...[INFO] Loading file: /data/px4/param/parameters_mag.cal
[INFO] Scanning currently loaded parameters...
The following parameters about to be loaded differ from those currently loaded:
NAME CURRENT NEW
[1] CAL_MAG0_ID N/A 527625
[2] CAL_MAG0_PRIO N/A 75
[3] CAL_MAG0_XOFF N/A -0.284582
[4] CAL_MAG0_YOFF N/A -0.281098
[5] CAL_MAG0_ZOFF N/A 0.219934
[6] CAL_MAG0_XSCALE N/A 1.00463
[7] CAL_MAG0_YSCALE N/A 1.01471
[8] CAL_MAG0_ZSCALE N/A 0.979607
[9] CAL_MAG0_XODIAG N/A -0.0119525
[10] CAL_MAG0_YODIAG N/A 0.0184261
[11] CAL_MAG0_ZODIAG N/A -0.00372516
[12] CAL_MAG0_XCOMP N/A 0
[13] CAL_MAG0_YCOMP N/A 0
[14] CAL_MAG0_ZCOMP N/A 0
[15] CAL_MAG0_ROT N/A 0[INFO] Setting params...
[INFO] PX4 parameter configuration successful!
[INFO] Trimming duplicate parameters...[INFO] Loading file: /data/px4/param/parameters_rc.cal
[INFO] Trimming duplicate parameters...
[INFO] Scanning currently loaded parameters...
[INFO] No difference in parameters was detected.
[INFO] Done configuring for platform MRB-D0005-V2
Success running a second time
The following steps worked on the second try:voxl-configure-px4-params --non-interactive --platform MRB-D0005-V2
FAILED TO EXECUTE the following steps:voxl-elrs --scan
Encountered Problems Configuring MPA Services :-/ Some Services may not start up on next rebootCalibration File Status:
Present /data/modalai/voxl-imu-server.cal
Present /data/modalai/opencv_tracking_intrinsics.yml
Present /data/px4/param/parameters_gyro.cal
Present /data/px4/param/parameters_acc.cal
Present /data/px4/param/parameters_level.cal
Present /data/px4/param/parameters_mag.calPLEASE POWER CYCLE YOUR VOXL
-
@tom
VOXL Platform: M0054
Detected RB5 Flight, VOXL2 M0054 or M0104!
INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000
Sending library name request: libslpi_qrb5165_io.so
Sending initialization request
INFO: ESC(s) detected on port: /dev/slpi-uart-2, baud rate: 2000000
INFO: ESCs detected:
INFO: ---------------------
ID: 0, SW: 39, HW: 37: ModalAi 4-in-1 ESC (M0134-1)
ID: 1, SW: 39, HW: 37: ModalAi 4-in-1 ESC (M0134-1)
ID: 2, SW: 39, HW: 37: ModalAi 4-in-1 ESC (M0134-1)
ID: 3, SW: 39, HW: 37: ModalAi 4-in-1 ESC (M0134-1)INFO: Loading XML config file...
INFO: Uploading params for ESC ID 255...
-- board config
-- id config
-- uart config
-- tune config
DONE
INFO: Resetting ESCs...
DONE
WARNING: Received 12 bytes of data from SLPI while SLPI uart not in use (topic uart_data)
disabling bridge
bridge disabled
Success!executing: voxl-elrs --scan
[ERROR] Error reading device information.
[ERROR] Ensure that transmitter is turned off and receiver is not in bootloader mode.
first try failed, executing a second time: voxl-elrs --scan
[ERROR] Error reading device information.
[ERROR] Ensure that transmitter is turned off and receiver is not in bootloader mode.
FAILED TO EXECUTE: voxl-elrs --scanexecuting: systemctl stop voxl-px4
Success!executing: rm -f /data/px4/param/parameters
Success!executing: voxl-configure-px4 starling_v2
wiping old config file
enabling voxl-px4 systemd service
Created symlink /etc/systemd/system/multi-user.target.wants/voxl-px4.service → /etc/systemd/system/voxl-px4.service.
Done configuring voxl-px4
Success!executing: systemctl stop voxl-mavlink-server
Success!executing: sleep 1
Success!executing: voxl-configure-px4-params --non-interactive --platform MRB-D0005-V2
[INFO] Voxl-px4 not currently running.
[INFO] Starting voxl-px4 service...
[INFO] Voxl-px4 started successfully!
[INFO] Loading the following param files: platforms/Starling_V2.params, EKF2_helpers/indoor_vio.params, radio_helpers/Commando_8.params.[INFO] Loading file: /usr/share/modalai/px4_params/v1.14/platforms/Starling_V2.params
[INFO] Scanning currently loaded parameters...
The following parameters about to be loaded differ from those currently loaded:
NAME CURRENT NEW
[1] CBRK_IO_SAFETY N/A 22027
[2] COM_CPU_MAX 0.0 -1.0
[3] COM_OF_LOSS_T N/A 3.0
[4] NAV_ACC_RAD N/A 2.0
[5] GPS_UBX_DYNMODEL N/A 6
[6] RTL_RETURN_ALT N/A 30
[7] RTL_DESCEND_ALT N/A 10
[8] SENS_BOARD_ROT N/A 0
[9] BAT1_N_CELLS N/A 2
[10] BAT1_R_INTERNAL N/A 0.025
[11] BAT1_CAPACITY N/A 2900
[12] BAT1_V_CHARGED N/A 4.1
[13] BAT1_V_EMPTY N/A 3.2
[14] BAT_LOW_THR N/A 0.15
[15] BAT_CRIT_THR N/A 0.10
[16] BAT_EMERGEN_THR N/A 0.05
[17] MPC_THR_HOVER 0.42 0.34
[18] THR_MDL_FAC N/A 0.9
[19] VOXL_ESC_RPM_MAX 10500.0 15000.0
[20] VOXL_ESC_RPM_MIN 1000.0 3000.0
[21] VOXL_ESC_FUNC2 103.0 104.0
[22] VOXL_ESC_FUNC3 104.0 102.0
[23] VOXL_ESC_FUNC4 102.0 103.0
[24] VOXL_ESC_T_COSP N/A 0.990000009536743164
[25] VOXL_ESC_T_DEAD N/A 20
[26] VOXL_ESC_T_EXPO N/A 35
[27] VOXL_ESC_T_MINF N/A 0.150000005960464478
[28] VOXL_ESC_T_PERC N/A 90
[29] VOXL_ESC_VLOG N/A 1
[30] MC_BAT_SCALE_EN N/A 0
[31] EKF2_IMU_POS_X 0.027 0.0157
[32] EKF2_IMU_POS_Y 0.009 0.0078
[33] EKF2_IMU_POS_Z -0.019 -0.018
[34] EKF2_EV_POS_X N/A 0.0
[35] EKF2_EV_POS_Y N/A 0.0
[36] EKF2_EV_POS_Z N/A 0.0
[37] CA_ROTOR0_PX 0.15 0.085
[38] CA_ROTOR0_PY 0.15 0.0625
[39] CA_ROTOR1_PX -0.15 -0.085
[40] CA_ROTOR1_PY -0.15 -0.0625
[41] CA_ROTOR2_PX 0.15 0.085
[42] CA_ROTOR2_PY -0.15 -0.0625
[43] CA_ROTOR3_PX -0.15 -0.085
[44] CA_ROTOR3_PY 0.15 0.0625
[45] CA_ROTOR0_AX N/A 0.0
[46] CA_ROTOR0_AY N/A 0.0
[47] CA_ROTOR1_AX N/A 0.0
[48] CA_ROTOR1_AY N/A 0.0
[49] CA_ROTOR2_AX N/A 0.0
[50] CA_ROTOR2_AY N/A 0.0
[51] CA_ROTOR3_AX N/A 0.0
[52] CA_ROTOR3_AY N/A 0.0
[53] CA_ROTOR0_KM N/A 0.05
[54] CA_ROTOR1_KM N/A 0.05
[55] MOT_SLEW_MAX N/A 0.0
[56] IMU_DGYRO_CUTOFF N/A 60.0
[57] IMU_ACCEL_CUTOFF N/A 80.0
[58] IMU_GYRO_CUTOFF N/A 80.0
[59] IMU_GYRO_DNF_EN N/A 1
[60] IMU_GYRO_DNF_HMC N/A 3
[61] IMU_GYRO_DNF_BW N/A 15
[62] MC_PITCH_P 5.5 16.0
[63] MC_PITCHRATE_P 0.08 0.12
[64] MC_PITCHRATE_I 0.2 0.05
[65] MC_PITCHRATE_D 0.0013 0.0015
[66] MC_PITCH_CUTOFF N/A 150.0
[67] MC_ROLL_P 5.5 16.0
[68] MC_ROLLRATE_P 0.08 0.09
[69] MC_ROLLRATE_I 0.2 0.05
[70] MC_ROLLRATE_D 0.0013 0.0015
[71] MC_ROLL_CUTOFF N/A 150.0
[72] MC_YAW_P 2.0 2.8
[73] MC_YAWRATE_I 0.1 0.5
[74] MC_YAW_CUTOFF N/A 150.0
[75] MC_ROLLRATE_MAX N/A 130.0
[76] MC_PITCHRATE_MAX N/A 130.0
[77] MC_YAWRATE_MAX N/A 150.0
[78] MPC_POS_MODE 0.0 4.0
[79] MPC_YAW_EXPO 0.2 0.3
[80] MPC_XY_MAN_EXPO 0.2 0.45
[81] MPC_Z_MAN_EXPO 0.2 0.1
[82] MPC_ACC_HOR N/A 3.0
[83] MPC_JERK_MAX N/A 40.0
[84] MPC_TILTMAX_AIR N/A 30.0
[85] MPC_ACC_HOR_MAX N/A 1000.0
[86] MPC_ACC_UP_MAX N/A 3.0
[87] MPC_ACC_DOWN_MAX N/A 3.0
[88] MPC_VEL_MANUAL 5.0 3.0
[89] MPC_XY_VEL_MAX 5.0 3.0
[90] MPC_XY_CRUISE 5.0 3.0
[91] MPC_Z_VEL_MAX_DN 1.5 1.0
[92] MPC_Z_VEL_MAX_UP 4.0 1.0
[93] MPC_HOLD_MAX_XY N/A 0.0
[94] MPC_HOLD_MAX_Z N/A 0.0
[95] MPC_THR_MAX 0.75 0.7
[96] MPC_MANTHR_MIN 0.05 0.08
[97] MPC_XY_P 0.95 3.5
[98] MPC_Z_P 1.0 5.0
[99] MPC_TKO_RAMP_T 1.5 1.0
[100] COM_SPOOLUP_TIME N/A 2.0
[101] LNDMC_ROT_MAX N/A 30.0
[102] LNDMC_TRIG_TIME N/A 0.5
[103] COM_DISARM_LAND N/A 0.1
[104] COM_DISARM_PRFLT -1.0 20.0[INFO] Setting params...
[ERROR] Failed to set PX4 parameters. Check voxl-px4 status for details.
first try failed, executing a second time: voxl-configure-px4-params --non-interactive --platform MRB-D0005-V2
[INFO] Voxl-px4 service found and active.
[INFO] Loading the following param files: platforms/Starling_V2.params, EKF2_helpers/indoor_vio.params, radio_helpers/Commando_8.params.[INFO] Loading file: /usr/share/modalai/px4_params/v1.14/platforms/Starling_V2.params
[INFO] Scanning currently loaded parameters...
The following parameters about to be loaded differ from those currently loaded:
NAME CURRENT NEW
[1] CBRK_IO_SAFETY N/A 22027
[2] CBRK_SUPPLY_CHK N/A 894281
[3] COM_CPU_MAX N/A -1
[4] COM_OF_LOSS_T N/A 3.0
[5] NAV_ACC_RAD N/A 2.0
[6] GPS_UBX_DYNMODEL N/A 6
[7] RTL_RETURN_ALT N/A 30
[8] RTL_DESCEND_ALT N/A 10
[9] IMU_GYRO_RATEMAX N/A 800
[10] SYS_AUTOSTART N/A 4001
[11] MAV_TYPE N/A 2
[12] SENS_BOARD_ROT N/A 0
[13] BAT1_N_CELLS N/A 2
[14] BAT1_R_INTERNAL N/A 0.025
[15] BAT1_CAPACITY N/A 2900
[16] BAT1_V_CHARGED N/A 4.1
[17] BAT1_V_EMPTY N/A 3.2
[18] BAT_LOW_THR N/A 0.15
[19] BAT_CRIT_THR N/A 0.10
[20] BAT_EMERGEN_THR N/A 0.05
[21] MPC_THR_HOVER N/A 0.34
[22] THR_MDL_FAC N/A 0.9
[23] VOXL_ESC_FUNC1 N/A 101
[24] VOXL_ESC_FUNC2 103.0 104.0
[25] VOXL_ESC_FUNC3 104.0 102.0
[26] VOXL_ESC_FUNC4 102.0 103.0
[27] VOXL_ESC_SDIR1 N/A 0
[28] VOXL_ESC_SDIR2 N/A 0
[29] VOXL_ESC_SDIR3 N/A 0
[30] VOXL_ESC_SDIR4 N/A 0
[31] VOXL_ESC_BAUD N/A 2000000
[32] VOXL_ESC_CONFIG N/A 1
[33] VOXL_ESC_MODE N/A 0
[34] VOXL_ESC_REV N/A 0
[35] CA_AIRFRAME N/A 0
[36] CA_ROTOR_COUNT N/A 4
[37] CA_ROTOR2_KM N/A -0.05
[38] CA_ROTOR3_KM N/A -0.05
[39] MC_AIRMODE N/A 0
[40] MC_PITCHRATE_K N/A 1.0
[41] MC_ROLLRATE_K N/A 1.0
[42] MC_YAWRATE_P N/A 0.15
[43] MC_YAWRATE_D N/A 0.0
[44] MC_YAWRATE_K N/A 1.0
[45] MPC_LAND_SPEED N/A 1.0
[46] MPC_THR_MIN N/A 0.08
[47] MPC_XY_VEL_P_ACC N/A 3.00
[48] MPC_XY_VEL_I_ACC N/A 0.10
[49] MPC_XY_VEL_D_ACC N/A 0.00
[50] MPC_Z_VEL_P_ACC N/A 8.0
[51] MPC_Z_VEL_I_ACC N/A 2.0
[52] MPC_Z_VEL_D_ACC N/A 0.0
[53] MPC_TKO_SPEED N/A 1.50[INFO] Setting params...
[INFO] PX4 parameter configuration successful![INFO] Loading file: /usr/share/modalai/px4_params/v1.14/EKF2_helpers/indoor_vio.params
[INFO] Scanning currently loaded parameters...
The following parameters about to be loaded differ from those currently loaded:
NAME CURRENT NEW
[1] SYS_HAS_MAG N/A 1
[2] SYS_HAS_GPS N/A 1
[3] COM_ARM_WO_GPS N/A 1
[4] EKF2_GPS_CTRL N/A 0
[5] EKF2_MAG_TYPE N/A 5
[6] EKF2_BARO_CTRL N/A 1
[7] EKF2_EV_CTRL N/A 15
[8] EKF2_OF_CTRL N/A 0
[9] EKF2_RNG_CTRL N/A 0
[10] EKF2_HGT_REF N/A 3
[11] EKF2_EV_QMIN N/A 1
[12] EKF2_EV_NOISE_MD N/A 0
[13] EKF2_EVA_NOISE N/A 0.1
[14] EKF2_EVP_GATE N/A 5.0
[15] EKF2_EVP_NOISE N/A 0.1
[16] EKF2_EVV_GATE N/A 3.0
[17] EKF2_EVV_NOISE N/A 0.1
[18] EKF2_EV_DELAY N/A 0.00[INFO] Setting params...
[INFO] PX4 parameter configuration successful![INFO] Loading file: /usr/share/modalai/px4_params/v1.14/radio_helpers/Commando_8.params
[INFO] Scanning currently loaded parameters...
The following parameters about to be loaded differ from those currently loaded:
NAME CURRENT NEW
[1] RC_CHAN_CNT N/A 16
[2] RC_MAP_KILL_SW N/A 5
[3] RC_MAP_FLTMODE N/A 6
[4] COM_FLTMODE1 N/A 0
[5] COM_FLTMODE2 N/A -1
[6] COM_FLTMODE3 N/A -1
[7] COM_FLTMODE4 N/A 2
[8] COM_FLTMODE5 N/A -1
[9] COM_FLTMODE6 N/A 7
[10] RC1_DZ N/A 10.000000000000000000
[11] RC1_MAX N/A 2000.000000000000000000
[12] RC1_MIN N/A 1000.000000000000000000
[13] RC1_REV N/A 1.000000000000000000
[14] RC1_TRIM N/A 1500.000000000000000000
[15] RC2_DZ N/A 10.000000000000000000
[16] RC2_MAX N/A 2000.000000000000000000
[17] RC2_MIN N/A 1000.000000000000000000
[18] RC2_REV N/A 1.000000000000000000
[19] RC2_TRIM N/A 1500.000000000000000000
[20] RC3_DZ N/A 10.000000000000000000
[21] RC3_MAX N/A 2000.000000000000000000
[22] RC3_MIN N/A 1000.000000000000000000
[23] RC3_REV N/A 1.000000000000000000
[24] RC3_TRIM N/A 1500.000000000000000000
[25] RC4_DZ N/A 10.000000000000000000
[26] RC4_MAX N/A 2000.000000000000000000
[27] RC4_MIN N/A 1000.000000000000000000
[28] RC4_REV N/A 1.000000000000000000
[29] RC4_TRIM N/A 1500.000000000000000000
[30] RC5_DZ N/A 10.000000000000000000
[31] RC5_MAX N/A 1988.000000000000000000
[32] RC5_MIN N/A 1011.000000000000000000
[33] RC5_REV N/A 1.000000000000000000
[34] RC5_TRIM N/A 1500.000000000000000000
[35] RC6_DZ N/A 10.000000000000000000
[36] RC6_MAX N/A 1988.000000000000000000
[37] RC6_MIN N/A 1011.000000000000000000
[38] RC6_REV N/A 1.000000000000000000
[39] RC6_TRIM N/A 1500.000000000000000000
[40] RC7_DZ N/A 10.000000000000000000
[41] RC7_MAX N/A 1988.000000000000000000
[42] RC7_MIN N/A 1011.000000000000000000
[43] RC7_REV N/A 1.000000000000000000
[44] RC7_TRIM N/A 1500.000000000000000000
[45] RC8_DZ N/A 10.000000000000000000
[46] RC8_MAX N/A 1988.000000000000000000
[47] RC8_MIN N/A 1011.000000000000000000
[48] RC8_REV N/A 1.000000000000000000
[49] RC8_TRIM N/A 1500.000000000000000000
[50] RC9_DZ N/A 0.000000000000000000
[51] RC9_MAX N/A 2000.000000000000000000
[52] RC9_MIN N/A 1000.000000000000000000
[53] RC9_REV N/A 1.000000000000000000
[54] RC9_TRIM N/A 1500.000000000000000000
[55] RC10_DZ N/A 0.000000000000000000
[56] RC10_MAX N/A 2000.000000000000000000
[57] RC10_MIN N/A 1000.000000000000000000
[58] RC10_REV N/A 1.000000000000000000
[59] RC10_TRIM N/A 1500.000000000000000000
[60] RC11_DZ N/A 0.000000000000000000
[61] RC11_MAX N/A 2000.000000000000000000
[62] RC11_MIN N/A 1000.000000000000000000
[63] RC11_REV N/A 1.000000000000000000
[64] RC11_TRIM N/A 1500.000000000000000000
[65] RC12_DZ N/A 0.000000000000000000
[66] RC12_MAX N/A 1988.000000000000000000
[67] RC12_MIN N/A 1011.000000000000000000
[68] RC12_REV N/A 1.000000000000000000
[69] RC12_TRIM N/A 1499.000000000000000000
[70] RC13_DZ N/A 0.000000000000000000
[71] RC13_MAX N/A 2000.000000000000000000
[72] RC13_MIN N/A 1000.000000000000000000
[73] RC13_REV N/A 1.000000000000000000
[74] RC13_TRIM N/A 1500.000000000000000000
[75] RC14_DZ N/A 0.000000000000000000
[76] RC14_MAX N/A 2000.000000000000000000
[77] RC14_MIN N/A 1000.000000000000000000
[78] RC14_REV N/A 1.000000000000000000
[79] RC14_TRIM N/A 1500.000000000000000000
[80] RC15_DZ N/A 0.000000000000000000
[81] RC15_MAX N/A 2000.000000000000000000
[82] RC15_MIN N/A 1000.000000000000000000
[83] RC15_REV N/A 1.000000000000000000
[84] RC15_TRIM N/A 1500.000000000000000000
[85] RC16_DZ N/A 0.000000000000000000
[86] RC16_MAX N/A 2000.000000000000000000
[87] RC16_MIN N/A 1000.000000000000000000
[88] RC16_REV N/A 1.000000000000000000
[89] RC16_TRIM N/A 1500.000000000000000000
[90] RC17_DZ N/A 0.000000000000000000
[91] RC17_MAX N/A 2000.000000000000000000
[92] RC17_MIN N/A 1000.000000000000000000
[93] RC17_REV N/A 1.000000000000000000
[94] RC17_TRIM N/A 1500.000000000000000000
[95] RC18_DZ N/A 0.000000000000000000
[96] RC18_MAX N/A 2000.000000000000000000
[97] RC18_MIN N/A 1000.000000000000000000
[98] RC18_REV N/A 1.000000000000000000
[99] RC18_TRIM N/A 1500.000000000000000000
[100] RC_MAP_ACRO_SW N/A 0
[101] RC_MAP_ARM_SW N/A 0
[102] RC_MAP_AUX1 N/A 0
[103] RC_MAP_AUX2 N/A 0
[104] RC_MAP_AUX3 N/A 0
[105] RC_MAP_AUX4 N/A 0
[106] RC_MAP_AUX5 N/A 0
[107] RC_MAP_AUX6 N/A 0
[108] RC_MAP_FAILSAFE N/A 0
[109] RC_MAP_FLAPS N/A 0
[110] RC_MAP_GEAR_SW N/A 0
[111] RC_MAP_LOITER_SW N/A 0
[112] RC_MAP_MAN_SW N/A 0
[113] RC_MAP_MODE_SW N/A 0
[114] RC_MAP_OFFB_SW N/A 0
[115] RC_MAP_PARAM1 N/A 0
[116] RC_MAP_PARAM2 N/A 0
[117] RC_MAP_PARAM3 N/A 0
[118] RC_MAP_PITCH N/A 2
[119] RC_MAP_POSCTL_SW N/A 0
[120] RC_MAP_RATT_SW N/A 0
[121] RC_MAP_RETURN_SW N/A 0
[122] RC_MAP_ROLL N/A 1
[123] RC_MAP_STAB_SW N/A 0
[124] RC_MAP_THROTTLE N/A 3
[125] RC_MAP_TRANS_SW N/A 0
[126] RC_MAP_YAW N/A 4[INFO] Setting params...
[INFO] PX4 parameter configuration successful![INFO] Loading file: /data/px4/param/parameters_gyro.cal
[INFO] Scanning currently loaded parameters...
The following parameters about to be loaded differ from those currently loaded:
NAME CURRENT NEW
[1] CAL_GYRO0_ID N/A 2490378
[2] CAL_GYRO0_PRIO N/A 50
[3] CAL_GYRO0_XOFF N/A 0.0134728
[4] CAL_GYRO0_YOFF N/A -0.00290391
[5] CAL_GYRO0_ZOFF N/A -0.000202846
[6] CAL_GYRO0_ROT N/A -1[INFO] Setting params...
[INFO] PX4 parameter configuration successful!
[INFO] Trimming duplicate parameters...[INFO] Loading file: /data/px4/param/parameters_acc.cal
[INFO] Scanning currently loaded parameters...
The following parameters about to be loaded differ from those currently loaded:
NAME CURRENT NEW
[1] CAL_ACC0_ID N/A 2490378
[2] CAL_ACC0_PRIO N/A 50
[3] CAL_ACC0_XOFF N/A 0.016479
[4] CAL_ACC0_YOFF N/A 0.0495152
[5] CAL_ACC0_ZOFF N/A -0.00822353
[6] CAL_ACC0_XSCALE N/A 1
[7] CAL_ACC0_YSCALE N/A 1
[8] CAL_ACC0_ZSCALE N/A 1
[9] CAL_ACC0_ROT N/A -1[INFO] Setting params...
[INFO] PX4 parameter configuration successful!
[INFO] Trimming duplicate parameters...[INFO] Loading file: /data/px4/param/parameters_level.cal
[INFO] Scanning currently loaded parameters...
The following parameters about to be loaded differ from those currently loaded:
NAME CURRENT NEW
[1] SENS_BOARD_X_OFF N/A 0.0105941
[2] SENS_BOARD_Y_OFF N/A 0.00175017[INFO] Setting params...
[INFO] PX4 parameter configuration successful!
[INFO] Trimming duplicate parameters...[INFO] Loading file: /data/px4/param/parameters_mag.cal
[INFO] Scanning currently loaded parameters...
The following parameters about to be loaded differ from those currently loaded:
NAME CURRENT NEW
[1] CAL_MAG0_ID N/A 527625
[2] CAL_MAG0_PRIO N/A 75
[3] CAL_MAG0_XOFF N/A -0.284582
[4] CAL_MAG0_YOFF N/A -0.281098
[5] CAL_MAG0_ZOFF N/A 0.219934
[6] CAL_MAG0_XSCALE N/A 1.00463
[7] CAL_MAG0_YSCALE N/A 1.01471
[8] CAL_MAG0_ZSCALE N/A 0.979607
[9] CAL_MAG0_XODIAG N/A -0.0119525
[10] CAL_MAG0_YODIAG N/A 0.0184261
[11] CAL_MAG0_ZODIAG N/A -0.00372516
[12] CAL_MAG0_XCOMP N/A 0
[13] CAL_MAG0_YCOMP N/A 0
[14] CAL_MAG0_ZCOMP N/A 0
[15] CAL_MAG0_ROT N/A 0[INFO] Setting params...
[INFO] PX4 parameter configuration successful!
[INFO] Trimming duplicate parameters...[INFO] Loading file: /data/px4/param/parameters_rc.cal
[INFO] Trimming duplicate parameters...
[INFO] Scanning currently loaded parameters...
[INFO] No difference in parameters was detected.
[INFO] Done configuring for platform MRB-D0005-V2
Success running a second time
The following steps worked on the second try:voxl-configure-px4-params --non-interactive --platform MRB-D0005-V2
FAILED TO EXECUTE the following steps:voxl-elrs --scan
Encountered Problems Configuring MPA Services :-/ Some Services may not start up on next rebootCalibration File Status:
Present /data/modalai/voxl-imu-server.cal
Present /data/modalai/opencv_tracking_intrinsics.yml
Present /data/px4/param/parameters_gyro.cal
Present /data/px4/param/parameters_acc.cal
Present /data/px4/param/parameters_level.cal
Present /data/px4/param/parameters_mag.calPLEASE POWER CYCLE YOUR VOXL
-
@david-devassy What do you see with
voxl-list-pipesandsystemctl status voxl-camera-server@tom voxl2:/$ voxl-list-pipes
cpu_monitor
gcs_ip_list
hires_large_color
hires_large_encoded
hires_large_grey
hires_small_color
hires_small_encoded
hires_small_grey
hires_snapshot
horizon_cal_io
imu_apps
imu_apps_fft
mavlink_ap_heartbeat
mavlink_attitude
mavlink_from_gcs
mavlink_gps_raw_int
mavlink_local_position_ned
mavlink_onboard
mavlink_sys_status
mavlink_to_gcs
modal_io_bridge
plan_msgs
qvio
qvio_extended
qvio_overlay
tracking
voa_pc_out
voxl_mapper_aligned_ptcloud
voxl_mapper_costmap
voxl_mesh
voxl_mesh_endpoint
voxl_planner_render
vvhub_body_wrt_fixed
vvhub_body_wrt_local
vvhub_fixed_pose_inputvoxl2:/$ systemctl status voxl-camera-server
● voxl-camera-server.service - voxl-camera-server
Loaded: loaded (/usr/bin/voxl-camera-server; enabled; vendor preset: enabled)
Active: active (running) since Fri 2024-04-12 09:02:25 UTC; 3min 59s ago
Main PID: 1404 (voxl-camera-ser)
Tasks: 68 (limit: 4915)
CGroup: /system.slice/voxl-camera-server.service
└─1404 /usr/bin/voxl-camera-serverApr 12 09:02:25 m0054 voxl-camera-server[1404]: gbm_create_device(156): Info: backend name is: msm_drm
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: gbm_create_device(156): Info: backend name is: msm_drm
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: gbm_create_device(156): Info: backend name is: msm_drm
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: gbm_create_device(156): Info: backend name is: msm_drm
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: gbm_create_device(156): Info: backend name is: msm_drm
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: Starting Camera: tracking (originally id #2) with id offset: 1
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: Using gain limits min: 54 max: 3451
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: setting ov7251 BLC register for cam id 1
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: ------ voxl-camera-server: Started 2 of 3 cameras
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: ------ voxl-camera-server: Camera server is now running
voxl2:/$ -
@tom voxl2:/$ voxl-list-pipes
cpu_monitor
gcs_ip_list
hires_large_color
hires_large_encoded
hires_large_grey
hires_small_color
hires_small_encoded
hires_small_grey
hires_snapshot
horizon_cal_io
imu_apps
imu_apps_fft
mavlink_ap_heartbeat
mavlink_attitude
mavlink_from_gcs
mavlink_gps_raw_int
mavlink_local_position_ned
mavlink_onboard
mavlink_sys_status
mavlink_to_gcs
modal_io_bridge
plan_msgs
qvio
qvio_extended
qvio_overlay
tracking
voa_pc_out
voxl_mapper_aligned_ptcloud
voxl_mapper_costmap
voxl_mesh
voxl_mesh_endpoint
voxl_planner_render
vvhub_body_wrt_fixed
vvhub_body_wrt_local
vvhub_fixed_pose_inputvoxl2:/$ systemctl status voxl-camera-server
● voxl-camera-server.service - voxl-camera-server
Loaded: loaded (/usr/bin/voxl-camera-server; enabled; vendor preset: enabled)
Active: active (running) since Fri 2024-04-12 09:02:25 UTC; 3min 59s ago
Main PID: 1404 (voxl-camera-ser)
Tasks: 68 (limit: 4915)
CGroup: /system.slice/voxl-camera-server.service
└─1404 /usr/bin/voxl-camera-serverApr 12 09:02:25 m0054 voxl-camera-server[1404]: gbm_create_device(156): Info: backend name is: msm_drm
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: gbm_create_device(156): Info: backend name is: msm_drm
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: gbm_create_device(156): Info: backend name is: msm_drm
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: gbm_create_device(156): Info: backend name is: msm_drm
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: gbm_create_device(156): Info: backend name is: msm_drm
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: Starting Camera: tracking (originally id #2) with id offset: 1
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: Using gain limits min: 54 max: 3451
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: setting ov7251 BLC register for cam id 1
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: ------ voxl-camera-server: Started 2 of 3 cameras
Apr 12 09:02:25 m0054 voxl-camera-server[1404]: ------ voxl-camera-server: Camera server is now running
voxl2:/$ -
@david-devassy Okay so it does seem like the voxl2 is having an issue communicating with the TOF sensor. Is this a stock, unmodified starling?
@tom yes its a new one. stock unmodified. i think TOF module is not working properly. Do you provide any warranty for these.?
-
@tom yes its a new one. stock unmodified. i think TOF module is not working properly. Do you provide any warranty for these.?
@david-devassy That's not something I'm in control of but you can look into https://www.modalai.com/pages/rma
We do test all sensors and flight test each drone before shipping so the failure would've occurred sometime after
-
@david-devassy That's not something I'm in control of but you can look into https://www.modalai.com/pages/rma
We do test all sensors and flight test each drone before shipping so the failure would've occurred sometime after
@tom
I have a new issueSince yesterday, when I turned on the Starling drone, it just sits there. It's not getting armed. When I checked for ADB shell, it's not getting connected, and an error comes up saying no devices found. When I checked the forum, it said it might be bricked due to some file loss. We followed the unbrick tutorial, and after successful flashing of the latest QDL M0054.14.1a-flat-v3, the device is showing up as Qualcomm bulk something. However, ADB still isn't getting connected.
Please note that I am unable to enter adb shell and fast boot mode .For unbrick I followed this
https://docs.modalai.com/voxl2-unbricking
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login