Error running voxl-mpa-to-ros2
-
-
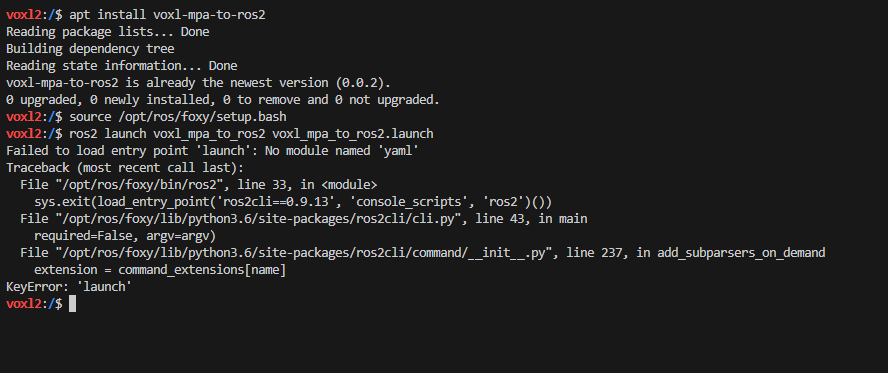
I tried running following commands:
@rsr4z Hi I have the same error after building the package from source and installing it, did you follow this procedure here, I still get that error even after doing that
-
@rsr4z Hi I have the same error after building the package from source and installing it, did you follow this procedure here, I still get that error even after doing that
@Darshit-Desai Try running voxl-configure-mpa-to-ros2. It should do all what you are looking for.
-
@Darshit-Desai Try running voxl-configure-mpa-to-ros2. It should do all what you are looking for.
@rsr4z Did the ros2 launch work for you after that?
-
@rsr4z Did the ros2 launch work for you after that?
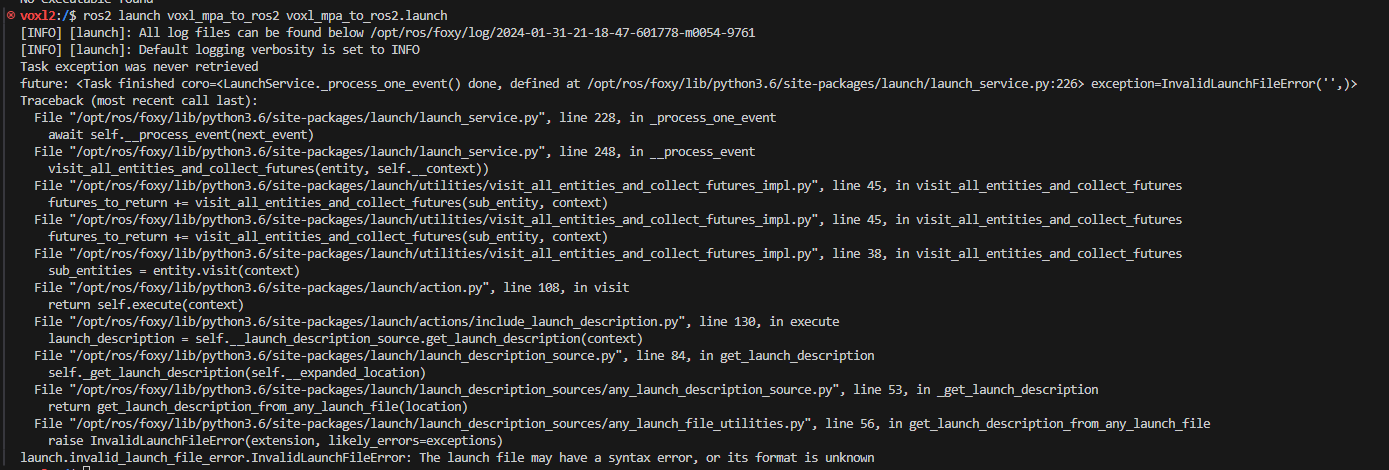
@Darshit-Desai Unfortunately I am now getting different error
-
@Darshit-Desai Unfortunately I am now getting different error
@rsr4z Were you able to resolve this issue? Also are you also using the voxl2 starling drone?
-
@Darshit-Desai Try running voxl-configure-mpa-to-ros2. It should do all what you are looking for.
@rsr4z Also I get this error while using this command
voxl2:~$ voxl-configure-mpa-to-ros2.
bash: voxl-configure-mpa-to-ros2.: command not found@rsr4z said in Error running voxl-mpa-to-ros2:
@Darshit-Desai Try running voxl-configure-mpa-to-ros2. It should do all what you are looking for.
-
@rsr4z Also I get this error while using this command
voxl2:~$ voxl-configure-mpa-to-ros2.
bash: voxl-configure-mpa-to-ros2.: command not found@rsr4z said in Error running voxl-mpa-to-ros2:
@Darshit-Desai Try running voxl-configure-mpa-to-ros2. It should do all what you are looking for.
It looks like the launch file is not valid. the launcher is not recognizing it as an xml file. However, i tried renaming the launch file to xml, it also failed.
First, as @rsr4z suggested, you need to run
voxl-configure-mpa-to-ros2to install prerequisites.Then to bypass the launch file issue, you can run the executable directly:
voxl2:$ ros2 run voxl_mpa_to_ros2 voxl_mpa_to_ros2_node Found new interface: imu_apps Found new interface: voa_pc_out Found new interface: vvhub_body_wrt_fixed Found new interface: vvhub_body_wrt_localWe will investigate the launch file issue
-
@Alex-Kushleyev said in Error running voxl-mpa-to-ros2:
ros2 run voxl_mpa_to_ros2 voxl_mpa_to_ros2_node
@Darshit-Desai @rsr4z can you please try the following
sudo apt-get install voxl-ros2-foxysudo apt-get install voxl-mpa-to-ros2voxl-configure-mpa-to-ros2source /opt/ros/foxy/mpa_to_ros2/install/setup.bashexport ROS_HOME=/opt/foxyros2 run voxl_mpa_to_ros2 voxl_mpa_to_ros2_node
Lmk what happens.
-
@Alex-Kushleyev said in Error running voxl-mpa-to-ros2:
ros2 run voxl_mpa_to_ros2 voxl_mpa_to_ros2_node
@Darshit-Desai @rsr4z can you please try the following
sudo apt-get install voxl-ros2-foxysudo apt-get install voxl-mpa-to-ros2voxl-configure-mpa-to-ros2source /opt/ros/foxy/mpa_to_ros2/install/setup.bashexport ROS_HOME=/opt/foxyros2 run voxl_mpa_to_ros2 voxl_mpa_to_ros2_node
Lmk what happens.
@Zachary-Lowell-0 Yes this runs the mpa-to-ros2 node, the only difference I found was that when streaming hires image data over wifi the speed is a little slower. When compared with ros1 voxlmpatoros the hires image data is streamed at 4 FPS while for ros2 voxlmpatoros2 the hires image data is streamed at 0.5-1FPS.
Another bug is that whenever I try to subscirbe to topic /hires_large_color or /hires_large_grey both voxl mpatoros1 and voxl mpatoros2 nodes get killed. This is irrespective of which domain I subscribe from, whether I subscribe inside another terminal of voxl or on a different terminal over wifi.
ROS 1:
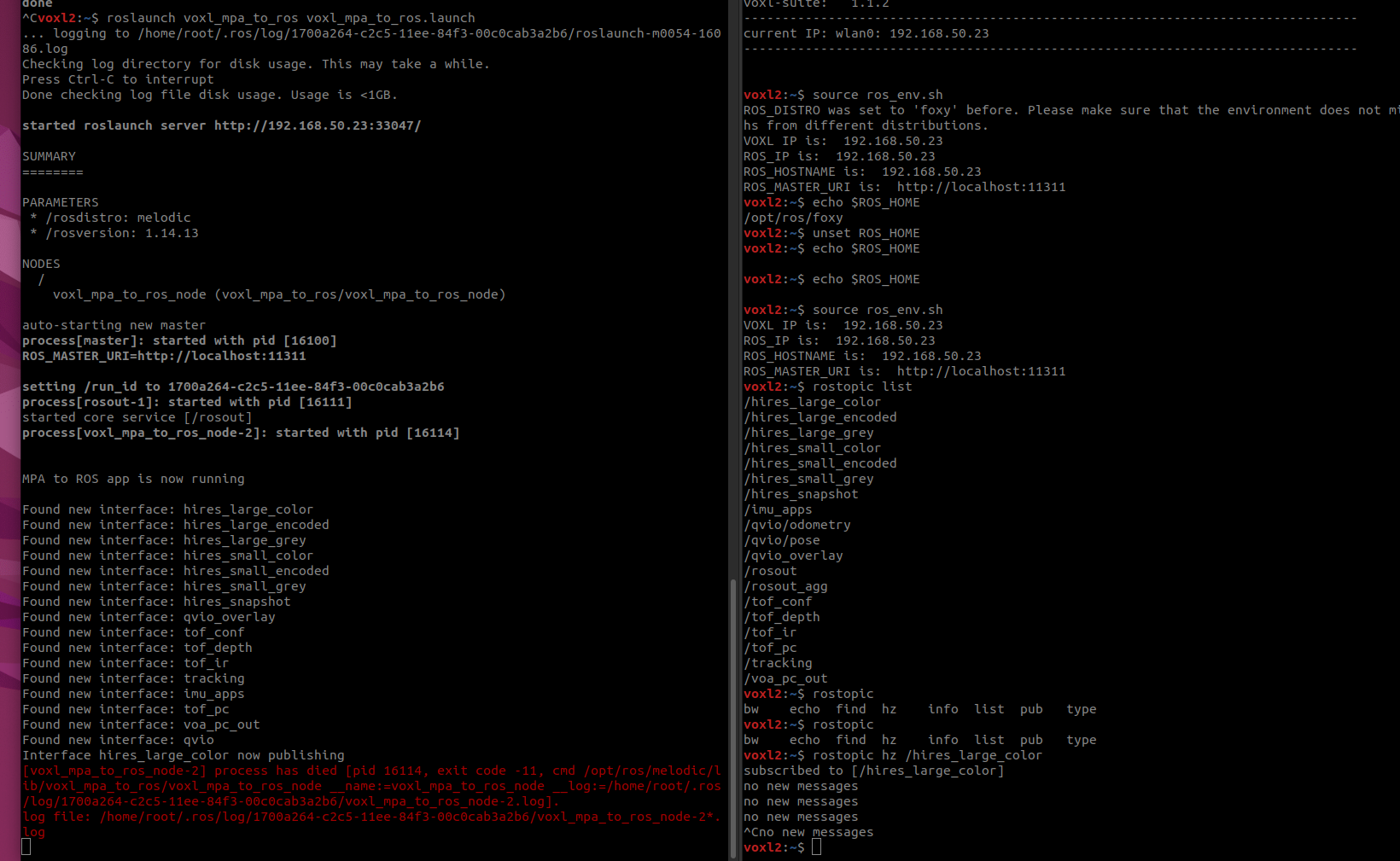
ROS 2:
-
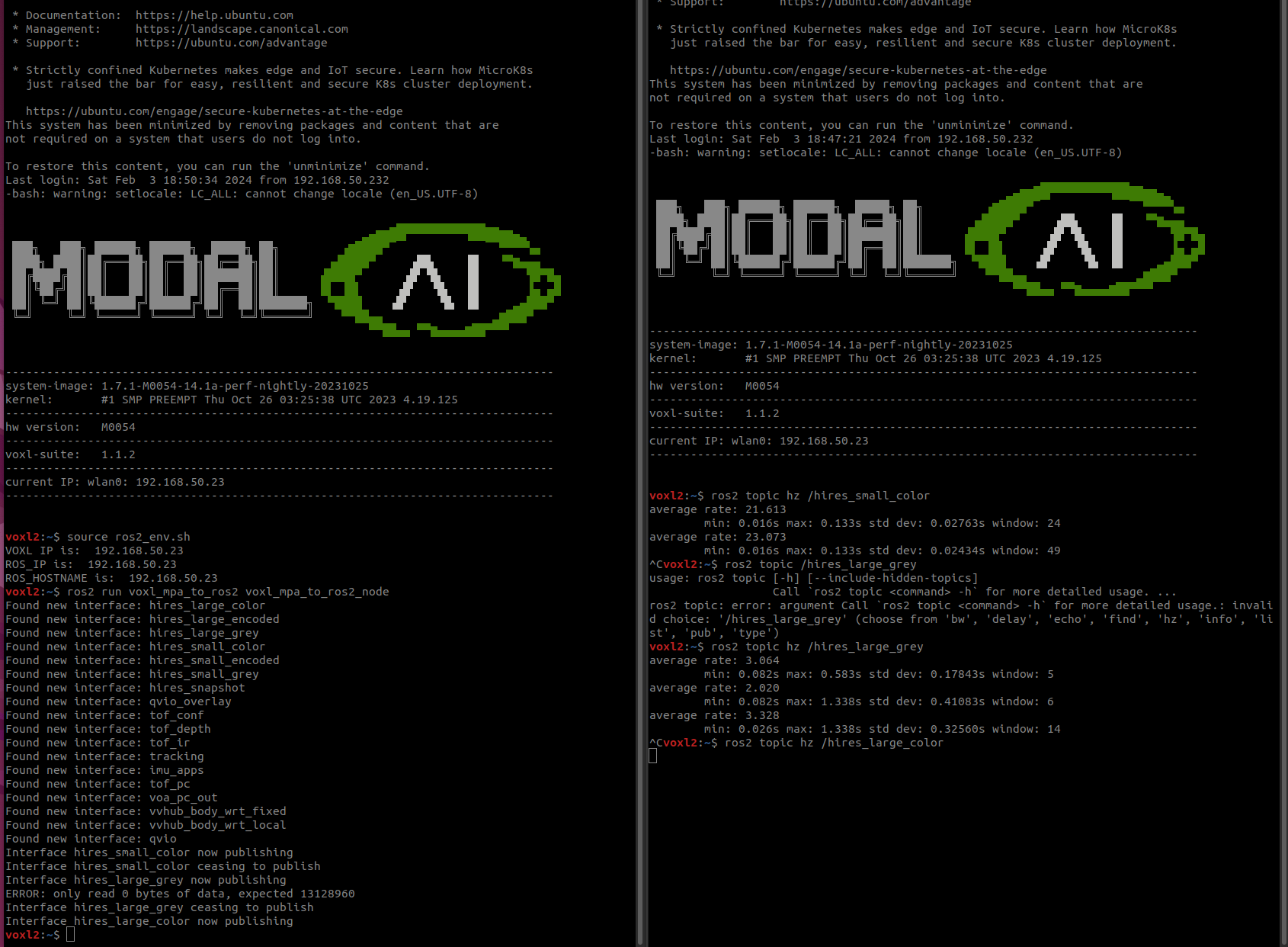
@Darshit-Desai this is the response I am getting for hires_small_color firstly:
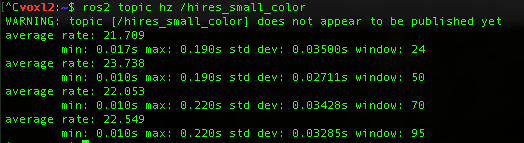
Looks like about 22 FPS.
As for hires_large:

I am getting about 2 FPS which is expected as we are converting 4K imagery from traditional YUV formatted frames into ros2 images, which is a bottleneck in general. I am not able to trigger the ros2 instance to die when I subscribe to the hires LARGE frames.
A note - internally, the HIRES LARGE imagery is more meant for onboard video recording, not for transfering between the MPA and ros2. For that reason I highly recommend using either the encoded pipe or the SMALL pipes.
-
@Alex-Kushleyev said in Error running voxl-mpa-to-ros2:
ros2 run voxl_mpa_to_ros2 voxl_mpa_to_ros2_node
@Darshit-Desai @rsr4z can you please try the following
sudo apt-get install voxl-ros2-foxysudo apt-get install voxl-mpa-to-ros2voxl-configure-mpa-to-ros2source /opt/ros/foxy/mpa_to_ros2/install/setup.bashexport ROS_HOME=/opt/foxyros2 run voxl_mpa_to_ros2 voxl_mpa_to_ros2_node
Lmk what happens.
@Darshit-Desai when you are subscribing to /hires_large_color or /hires_large_grey are you planning to do some kind of image processing on these image messages in ROS? These are huge 4k images and I'm not sure how much the ros CV bridge can handle. One option is to resize the images since that typically complements image processing for whatever consumer subscribes to these image topics and will result in a speed up. Rectification also can be used to reduce the image warp.
Another option is to play with the image sensor encodings and find something more manageable in ROS and computational power required.


Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login