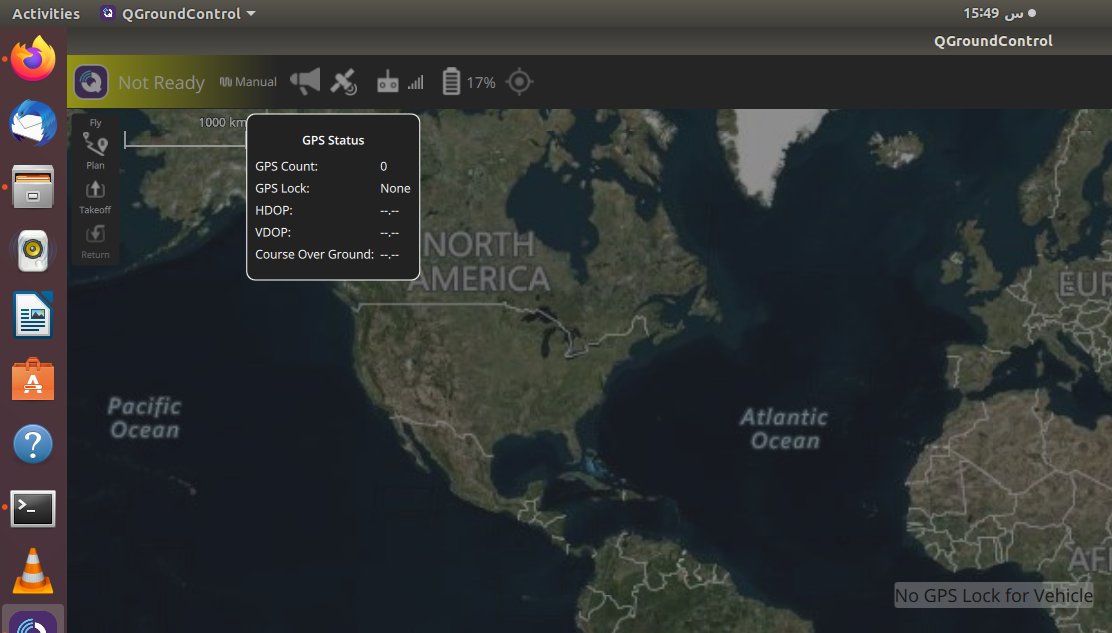
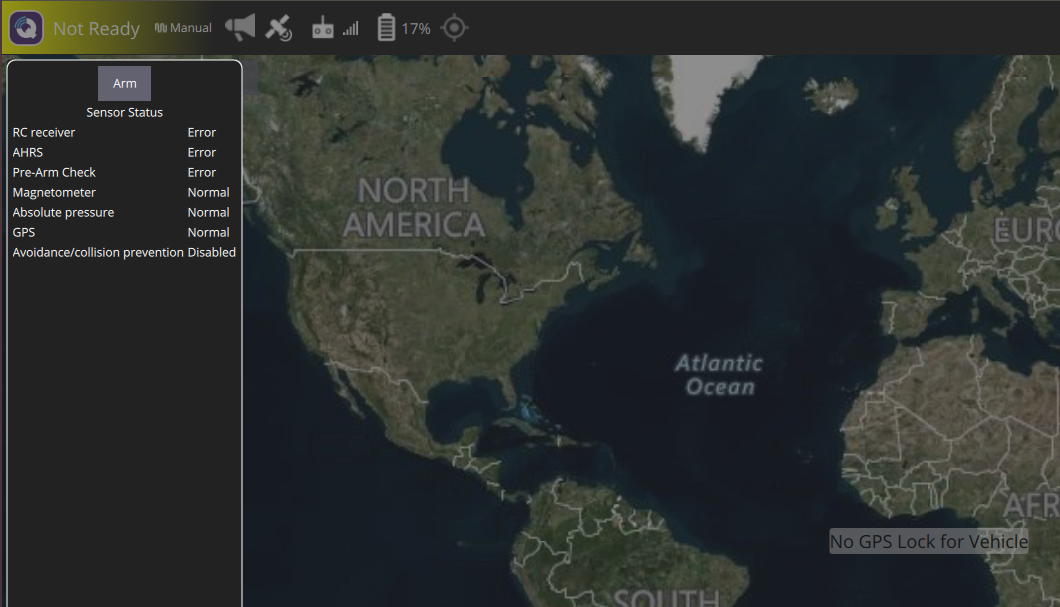
No GPs lock for vehicle
-
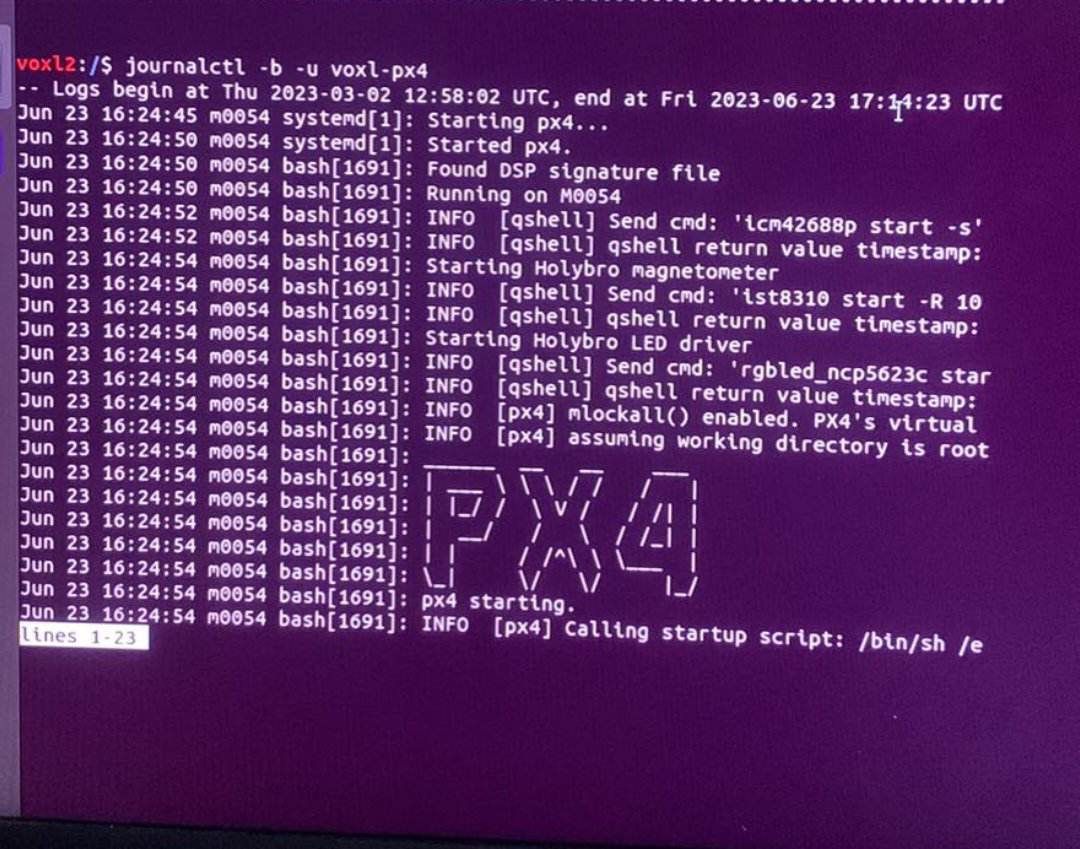
@M-al-khatib Can you log into the vehicle with either adb or ssh and provide the output of the command
journalctl -b -u voxl-px4? -
@Eric-Katzfey
this is the output
@M-al-khatib Perhaps this
journalctl --no-pager -b -u voxl-px4 > /tmp/test.txtand then attach the test.txt file so that all of the output is there? -
no text file created
voxl2:/$ px4-qshell gps status
INFO [qshell] Send cmd: 'gps status'
INFO [qshell] qshell return value timestamp: 2376085469, local time: 2376088441
voxl2:/$ ^C
voxl2:/$ px4-listener sensor_gps
never published
voxl2:/$ px4-listener sensor_gps
never published
voxl2:/$ journalctl --no-pager -b -u voxl-px4 > /tmp/test.txt
voxl2:/$ journalctl --no-pager -b -u voxl-px4
-- Logs begin at Thu 2023-03-02 12:58:02 UTC, end at Fri 2023-06-23 18:06:16 UTC. --
Jun 23 16:24:45 m0054 systemd[1]: Starting px4...
Jun 23 16:24:50 m0054 systemd[1]: Started px4.
Jun 23 16:24:50 m0054 bash[1691]: Found DSP signature file
Jun 23 16:24:50 m0054 bash[1691]: Running on M0054
Jun 23 16:24:52 m0054 bash[1691]: INFO [qshell] Send cmd: 'icm42688p start -s'
Jun 23 16:24:52 m0054 bash[1691]: INFO [qshell] qshell return value timestamp: 11522033, local time: 11523559
Jun 23 16:24:54 m0054 bash[1691]: Starting Holybro magnetometer
Jun 23 16:24:54 m0054 bash[1691]: INFO [qshell] Send cmd: 'ist8310 start -R 10 -X -b 1'
Jun 23 16:24:54 m0054 bash[1691]: INFO [qshell] qshell return value timestamp: 14344064, local time: 14345444
Jun 23 16:24:54 m0054 bash[1691]: Starting Holybro LED driver
Jun 23 16:24:54 m0054 bash[1691]: INFO [qshell] Send cmd: 'rgbled_ncp5623c start -X -b 1 -f 400 -a 56'
Jun 23 16:24:54 m0054 bash[1691]: INFO [qshell] qshell return value timestamp: 14401400, local time: 14402064
Jun 23 16:24:54 m0054 bash[1691]: INFO [px4] mlockall() enabled. PX4's virtual address space is locked into RAM.
Jun 23 16:24:54 m0054 bash[1691]: INFO [px4] assuming working directory is rootfs, no symlinks needed.
Jun 23 16:24:54 m0054 bash[1691]: ______ __ __ ___
Jun 23 16:24:54 m0054 bash[1691]: | ___ \ \ \ / / / |
Jun 23 16:24:54 m0054 bash[1691]: | |/ / \ V / / /| |
Jun 23 16:24:54 m0054 bash[1691]: | __/ / \ / /| |
Jun 23 16:24:54 m0054 bash[1691]: | | / /^\ \ ___ |
Jun 23 16:24:54 m0054 bash[1691]: _| / / |_/
Jun 23 16:24:54 m0054 bash[1691]: px4 starting.
Jun 23 16:24:54 m0054 bash[1691]: INFO [px4] Calling startup script: /bin/sh /etc/modalai/voxl-px4.config 0
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Creating qurt thread hpwork
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Successfully created px4 task PX4_hpwork with tid 83
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Creating qurt thread lpwork
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Successfully created px4 task PX4_lpwork with tid 82
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Creating qurt thread wkr_hrt
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Successfully created px4 task PX4_wkr_hrt with tid 81
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Creating qurt thread client_sync_thread
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Successfully created px4 task PX4_client_sync_thread with tid 80
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Creating qurt thread wq_manager
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Successfully created px4 task PX4_wq_manager with tid 79
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Creating qurt thread qshell
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Successfully created px4 task PX4_qshell with tid 78
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: qshell gotten: icm42688p start -s
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Creating qurt thread wq_SPI1
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Successfully created px4 task PX4_wq_SPI1 with tid 76
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: *** SPI Device ID 0x26000a 2490378
Jun 23 16:24:54 m0054 bash[1691]: INFO [uorb] Advertising remote topic sensor_accel
Jun 23 16:24:54 m0054 bash[1691]: INFO [uorb] Marking DeviceNode(parameter_server_set_used_request) as advertised in process_remote_topic
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(parameter_server_set_used_response) as advertised in process_remote_topic
Jun 23 16:24:54 m0054 bash[1691]: INFO [uorb] Advertising remote topic sensor_gyro
Jun 23 16:24:54 m0054 bash[1691]: INFO [uorb] Advertising remote topic imu_server
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: on SPI bus 1
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: icm42688p #0 on SPI bus 1 (devid=0x0)
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI:
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Ok executing command: icm42688p start -s
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Sending qshell retval with timestamp 11522033, current timestamp 11522034
Jun 23 16:24:54 m0054 bash[1691]: INFO [uorb] Advertising remote topic qshell_retval
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(parameter_client_reset_request) as advertised in process_remote_topic
Jun 23 16:24:54 m0054 bash[1691]: ERROR [muorb] SLPI: Cannot reset all parameters on client side
Jun 23 16:24:54 m0054 bash[1691]: INFO [uorb] Marking DeviceNode(parameter_client_reset_response) as advertised in process_remote_topic
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Advertising remote topic parameter_update
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(parameter_client_set_value_request) as advertised in process_remote_topic
Jun 23 16:24:54 m0054 bash[1691]: INFO [uorb] Marking DeviceNode(parameter_client_set_value_response) as advertised in process_remote_topic
Jun 23 16:24:54 m0054 bash[1691]: INFO [logger] logger started (mode=all)
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: qshell gotten: ist8310 start -R 10 -X -b 1
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Creating qurt thread wq_I2C1
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Successfully created px4 task PX4_wq_I2C1 with tid 75
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: *** I2C Device ID 0x60e09 396809
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: ist8310 #0 on I2C bus 1 (external)
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Ok executing command: ist8310 start -R 10 -X -b 1
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Sending qshell retval with timestamp 14344064, current timestamp 14344065
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: qshell gotten: rgbled_ncp5623c start -X -b 1 -f 400 -a 56
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: *** I2C Device ID 0x7b3809 8075273
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: rgbled_ncp5623c #0 on I2C bus 1 (external)
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Ok executing command: rgbled_ncp5623c start -X -b 1 -f 400 -a 56
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Sending qshell retval with timestamp 14401400, current timestamp 14401401
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: qshell gotten: icp10100 start -I -b 5
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Creating qurt thread wq_I2C5
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: Successfully created px4 task PX4_wq_I2C5 with tid 74
Jun 23 16:24:54 m0054 bash[1691]: INFO [muorb] SLPI: *** I2C Device ID 0x9c6329 1024INFO [qshell] Send cmd: 'icp10100 start -I -b 5'
Jun 23 16:24:54 m0054 bash[1691]: INFO [qshell] qshell return value timestamp: 14434955, local time: 14435823
Jun 23 16:24:55 m0054 bash[1691]: INFO [qshell] Send cmd: 'modalai_esc start'
Jun 23 16:24:55 m0054 bash[1691]: INFO [qshell] qshell return value timestamp: 14487155, local time: 14487822
Jun 23 16:24:55 m0054 bash[1691]: INFO [qshell] Send cmd: 'mixer load /dev/uart_esc quad_x.main.mix'
Jun 23 16:24:55 m0054 bash[1691]: INFO [qshell] qshell return value timestamp: 14542181, local time: 14543199
Jun 23 16:24:55 m0054 bash[1691]: INFO [qshell] Send cmd: 'voxlpm start -X -b 2'
Jun 23 16:24:55 m0054 bash[1691]: INFO [qshell] qshell return value timestamp: 14585276, local time: 14586089
Jun 23 16:24:55 m0054 bash[1691]: Starting Holybro GPS
Jun 23 16:24:55 m0054 bash[1691]: INFO [qshell] Send cmd: 'gps start -d 7 -b 115200'
Jun 23 16:24:55 m0054 bash[1691]: INFO [qshell] qshell return value timestamp: 14617107, local time: 14618038
Jun 23 16:24:55 m0054 bash[1691]: INFO [qshell] Send cmd: 'px4io detect'
Jun 23 16:24:55 m0054 bash[1691]: INFO [qshell] cmd returned with: -17
Jun 23 16:24:55 m0054 bash[1691]: INFO [qshell] qshell return value timestamp: 14668509, local time: 14669837
Jun 23 16:24:55 m0054 bash[1691]: ERROR [qshell] Command failed
Jun 23 16:24:55 m0054 bash[1691]: M0065 not detected, starting Spektrum RC driver
Jun 23 16:24:55 m0054 bash[1691]: INFO [qshell] Send cmd: 'spektrum_rc start -d 8'
Jun 23 16:24:55 m0054 bash[1691]: INFO [qshell] qshell return value timestamp: 14706420, local time: 14708458
Jun 23 16:24:56 m0054 bash[1691]: 9001
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: probe probe succeeded. data = 0x1 0x48
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: icp10100 #0 on I2C bus 5
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Ok executing command: icp10100 start -I -b 5
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Sending qshell retval with timestamp 14434955, current timestamp 14434956
Jun 23 16:24:56 m0054 bash[1691]: INFO [uorb] Advertising remote topic sensor_mag
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: qshell gotten: modalai_esc start
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Creating qurt thread wq_hp_default
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Successfully created px4 task PX4_wq_hp_default with tid 73
Jun 23 16:24:56 m0054 bash[1691]: INFO [uorb] Advertising remote topic test_motor
Jun 23 16:24:56 m0054 bash[1691]: INFO [uorb] Advertising remote topic sensor_baro
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Ok executing command: modalai_esc start
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Sending qshell retval with timestamp 14487155, current timestamp 14487156
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Opened UART ESC device
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: qshell gotten: mixer load /dev/uart_esc quad_x.main.mix
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Creating qurt thread wq_rate_ctrl
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Successfully created px4 task PX4_wq_rate_ctrl with tid 71
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Ok executing command: mixer load /dev/uart_esc quad_x.main.mix
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Sending qshell retval with timestamp 14542181, current timestamp 14542182
Jun 23 16:24:56 m0054 bash[1691]: INFO [uorb] Advertising remote topic actuator_outputs
Jun 23 16:24:56 m0054 bash[1691]: INFO [uorb] Advertising remote topic multirotor_motor_limits
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: qshell gotten: voxlpm start -X -b 2
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Creating qurt thread wq_I2C2
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Successfully created px4 task PX4_wq_I2C2 with tid 4169
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: *** I2C Device ID 0x784411 7881745
Jun 23 16:24:56 m0054 bash[1691]: INFO [uorb] Advertising remote topic battery_status
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: voxlpm #0 on I2C bus 2 (external)
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Ok executing command: voxlpm start -X -b 2
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Sending qshell retval with timestamp 14585276, current timestamp 14585277
Jun 23 16:24:56 m0054 bash[1691]: INFO [uorb] Advertising remote topic power_monitor
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: qshell gotten: gps start -d 7 -b 115200
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Creating qurt thread gps
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Successfully created px4 task PX4_gps with tid 70
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Ok executing command: gps start -d 7 -b 115200
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Sending qshell retval with timestamp 14617107, current timestamp 14617107
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: qshell gotten: px4io detect
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: serial port fd 2
Jun 23 16:24:56 m0054 bash[1691]: ERROR [muorb] SLPI: px4io read failed
Jun 23 16:24:56 m0054 bash[1691]: ERROR [muorb] SLPI: px4io io_reg_get(0,0,1): data error -5
Jun 23 16:24:56 m0054 bash[1691]: ERROR [muorb] SLPI: IO not installed
Jun 23 16:24:56 m0054 bash[1691]: ERROR [muorb] SLPI: Detection attempt 2 failed
Jun 23 16:24:56 m0054 bash[1691]: ERROR [muorb] SLPI: Detection attempt 1 failed
Jun 23 16:24:56 m0054 bash[1691]: ERROR [muorb] SLPI: Detection attempt 0 failed
Jun 23 16:24:56 m0054 bash[1691]: ERROR [muorb] SLPI: Failed to execute command: px4io detect
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Sending qshell retval with timestamp 14668509, current timestamp 14668510
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: qshell gotten: spektrum_rc start -d 8
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Creating qurt thread spektrum_rc_main
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Successfully created px4 task PX4_spektrum_rc_main with tid 67
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Ok executing command: spektrum_rc start -d 8
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Sending qshell retval with timestamp 14706420, current timestamp 14706421
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: qshell gotten: sensors start
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Creating qurt thread wq_nav_and_controllers
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Successfully created px4 task PX4_wq_nav_and_controllers with tid 66
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Ok executing command: sensors start
Jun 23 16:24:56 m0054 bash[1691]: INFO [muorb] SLPI: Sending qshell retval with timestamp 15763186, current timestamp 15763187
Jun 23 16:24:56 m0054 bash[1691]: INFO [uorb] Advertising remote topic vehicle_angINFO [qshell] Send cmd: 'sensors start'
Jun 23 16:24:56 m0054 bash[1691]: INFO [qshell] qshell return value timestamp: 15763186, local time: 15766524
Jun 23 16:24:56 m0054 bash[1691]: INFO [qshell] Send cmd: 'ekf2 start'
Jun 23 16:24:56 m0054 bash[1691]: INFO [qshell] qshell return value timestamp: 15924808, local time: 15926148
Jun 23 16:24:56 m0054 bash[1691]: INFO [qshell] Send cmd: 'mc_pos_control start'
Jun 23 16:24:56 m0054 bash[1691]: INFO [qshell] qshell return value timestamp: 15977526, local time: 15978641
Jun 23 16:24:56 m0054 bash[1691]: INFO [qshell] Send cmd: 'mc_att_control start'
Jun 23 16:24:56 m0054 bash[1691]: INFO [qshell] qshell return value timestamp: 16020779, local time: 16021799
Jun 23 16:24:56 m0054 bash[1691]: INFO [qshell] Send cmd: 'mc_rate_control start'
Jun 23 16:24:56 m0054 bash[1691]: INFO [qshell] qshell return value timestamp: 16076014, local time: 16077458
Jun 23 16:24:56 m0054 bash[1691]: INFO [qshell] Send cmd: 'mc_hover_thrust_estimator start'
Jun 23 16:24:56 m0054 bash[1691]: INFO [qshell] qshell return value timestamp: 16115582, local time: 16117055
Jun 23 16:24:56 m0054 bash[1691]: INFO [qshell] Send cmd: 'land_detector start multicopter'
Jun 23 16:24:56 m0054 bash[1691]: INFO [qshell] qshell return value timestamp: 16150880, local time: 16151957
Jun 23 16:24:57 m0054 bash[1691]: ular_acceleration
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic vehicle_angular_velocity
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Creating qurt thread wq_INS0
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Successfully created px4 task PX4_wq_INS0 with tid 65
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic vehicle_imu
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic vehicle_imu_status
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic sensors_status_imu
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic vehicle_acceleration
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic vehicle_air_data
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic sensor_selection
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic sensor_combined
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: qshell gotten: ekf2 start
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Ok executing command: ekf2 start
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Sending qshell retval with timestamp 15924808, current timestamp 15924809
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic ekf2_timestamps
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: qshell gotten: mc_pos_control start
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Ok executing command: mc_pos_control start
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Sending qshell retval with timestamp 15977526, current timestamp 15977527
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: qshell gotten: mc_att_control start
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Ok executing command: mc_att_control start
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Sending qshell retval with timestamp 16020779, current timestamp 16020780
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: qshell gotten: mc_rate_control start
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Ok executing command: mc_rate_control start
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Sending qshell retval with timestamp 16076014, current timestamp 16076015
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: qshell gotten: mc_hover_thrust_estimator start
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Ok executing command: mc_hover_thrust_estimator start
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Sending qshell retval with timestamp 16115582, current timestamp 16115583
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: qshell gotten: land_detector start multicopter
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Ok executing command: land_detector start multicopter
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Sending qshell retval with timestamp 16150880, current timestamp 16150881
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic vehicle_land_detected
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: 16481861: reset position to last known position
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: 16481861: reset velocity to zero
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic vehicle_local_position
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic vehicle_odometry
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic estimator_states
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic estimator_status
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic estimator_status_flags
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic estimator_innovations
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic estimator_innovation_test_ratios
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic estimator_innovation_variances
Jun 23 16:24:57 m0054 bash[1691]: INFO [dataman] Unknown restart, data manager file '/data/px4/dataman' size is 11798680 bytes
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Advertising remote topic position_setpoint_triplet
Jun 23 16:24:57 m0054 bash[1691]: INFO [commander] LED: open /dev/led0 failed (22)
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Advertising remote topic led_control
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Advertising remote topic tune_control
Jun 23 16:24:57 m0054 bash[1691]: INFO [PreFlightCheck] Failed EKF health preflight check while waiting for filter to settle
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Advertising remote topic vehicle_control_mode
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Advertising remote topic vehicle_status
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Advertising remote topic actuator_armed
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Advertising remote topic commander_state
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic rate_ctrl_status
Jun 23 16:24:57 m0054 bash[1691]: INFO [uorb] Advertising remote topic actuator_controls_0
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Advertising remote topic vehicle_status_flags
Jun 23 16:24:57 m0054 bash[1691]: INFO [muorb] SLPI: Advertising remote topic vehicle_command
voxl2:/$ /tmp/test.txt
bash: /tmp/test.txt: Permission denied
voxl2:/$ -
I can second the same issue. Getting the following for the GPS message check command -
voxl2:~$ px4-listener sensor_gps never publishedRecently received a brand new sentinel drone and wanted to try out indoor flight however QGroundControl prevents arming due to no GPS lock error. Quite similar to what's mentioned by the OP. Hoping to get a response soon. Thanks!
Please let me know if there's anything else you'd need.
-
@M-al-khatib Perhaps this
journalctl --no-pager -b -u voxl-px4 > /tmp/test.txtand then attach the test.txt file so that all of the output is there?@Eric-Katzfey
my test.txt file same as the Samer Jaradat file. -
@Eric-Katzfey
my test.txt file same as the Samer Jaradat file.@M-al-khatib If you are comfortable editing text files in Linux then you can try the same instructions that I provided him on that thread: https://forum.modalai.com/topic/2317/sentinel-px4-no-gps-lock-and-firmware-problem/21
-
@M-al-khatib If you are comfortable editing text files in Linux then you can try the same instructions that I provided him on that thread: https://forum.modalai.com/topic/2317/sentinel-px4-no-gps-lock-and-firmware-problem/21
This post is deleted! -
@M-al-khatib If you are comfortable editing text files in Linux then you can try the same instructions that I provided him on that thread: https://forum.modalai.com/topic/2317/sentinel-px4-no-gps-lock-and-firmware-problem/21
@Eric-Katzfey
"I can't find the command 'qshell gps start -d 7 -b 115200' or 'qshell gps start' in the file '/etc/modalai/voxl-px4.config'." -
@M-al-khatib If you are comfortable editing text files in Linux then you can try the same instructions that I provided him on that thread: https://forum.modalai.com/topic/2317/sentinel-px4-no-gps-lock-and-firmware-problem/21
@Eric-Katzfey
I have now arrived at this stage, yet my GPS count remains at zero.
-
@Eric-Katzfey
I have now arrived at this stage, yet my GPS count remains at zero.
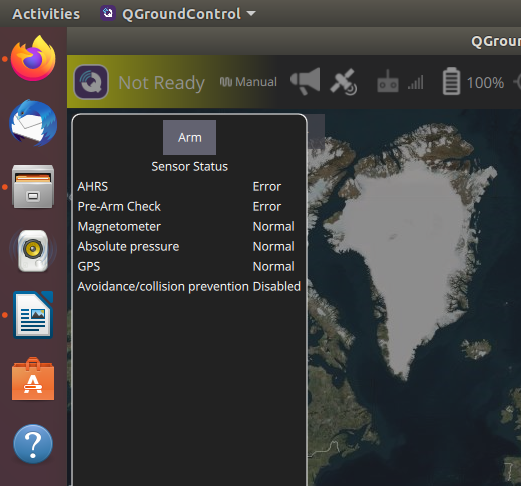
@M-al-khatib
While presently utilizing the exact same parameter, the QGS occasionally presents a GPS error, whereas at other instances, it indicates normal GPS functionality.
-
@M-al-khatib
While presently utilizing the exact same parameter, the QGS occasionally presents a GPS error, whereas at other instances, it indicates normal GPS functionality.
@M-al-khatib @Eric-Katzfey @modaltb ??
-
@M-al-khatib @Eric-Katzfey @modaltb ??
@M-al-khatib What release of software are you using? Can you find the file /etc/modalai/voxl-px4.config?
-
@M-al-khatib What release of software are you using? Can you find the file /etc/modalai/voxl-px4.config?
-
@M-al-khatib What do you get with the command
px4-versions? -
@M-al-khatib What do you get with the command
px4-versions?@Eric-Katzfey said in No GPs lock for vehicle:
px4-versions
modalai-slpi/now 1.0-7 arm64 [installed,local]
px4-rb5-flight/now 1.4-11 arm64 [installed,local]
px4-support/now 1.0-5 arm64 [installed,local]
python3-px4sitl/bionic 0.0.2-100 all
ros-melodic-px4-msgs/bionic 1.0.0-1bionic.20210505.094529 arm64
voxl-px4-imu-server/unknown,now 0.1.1 arm64 [installed,automatic]
voxl-vision-px4/unknown,now 1.0.5 arm64 [installed,automatic]
libfc-sensor/now 1.0-2 arm64 [installed,local]
1.2.1-M0054-14.1a-perf -
@Eric-Katzfey said in No GPs lock for vehicle:
px4-versions
modalai-slpi/now 1.0-7 arm64 [installed,local]
px4-rb5-flight/now 1.4-11 arm64 [installed,local]
px4-support/now 1.0-5 arm64 [installed,local]
python3-px4sitl/bionic 0.0.2-100 all
ros-melodic-px4-msgs/bionic 1.0.0-1bionic.20210505.094529 arm64
voxl-px4-imu-server/unknown,now 0.1.1 arm64 [installed,automatic]
voxl-vision-px4/unknown,now 1.0.5 arm64 [installed,automatic]
libfc-sensor/now 1.0-2 arm64 [installed,local]
1.2.1-M0054-14.1a-perf@M-al-khatib What drone do you have? A Sentinel? If so, can you please update your software to SDK 1.0.0?
-
@M-al-khatib What drone do you have? A Sentinel? If so, can you please update your software to SDK 1.0.0?
@Eric-Katzfey
Okay, I'm done, and the drone got GPS this is video link.
https://drive.google.com/file/d/1XfcMhyPKbJYDFnPwljM3zM7MbZWcx4op/view?usp=sharing
However, I mistakenly used the power adapter instead of the battery when I unplugged it to switch to flight on battery mode, so there was no GPS signal.
my sdk now is 1.0.0
and my firmware Version 1.14.0dev -
@Eric-Katzfey
Okay, I'm done, and the drone got GPS this is video link.
https://drive.google.com/file/d/1XfcMhyPKbJYDFnPwljM3zM7MbZWcx4op/view?usp=sharing
However, I mistakenly used the power adapter instead of the battery when I unplugged it to switch to flight on battery mode, so there was no GPS signal.
my sdk now is 1.0.0
and my firmware Version 1.14.0dev@M-al-khatib Great, glad to hear it is working now!
-
@M-al-khatib Great, glad to hear it is working now!
-
This post is deleted!
This post is deleted!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login