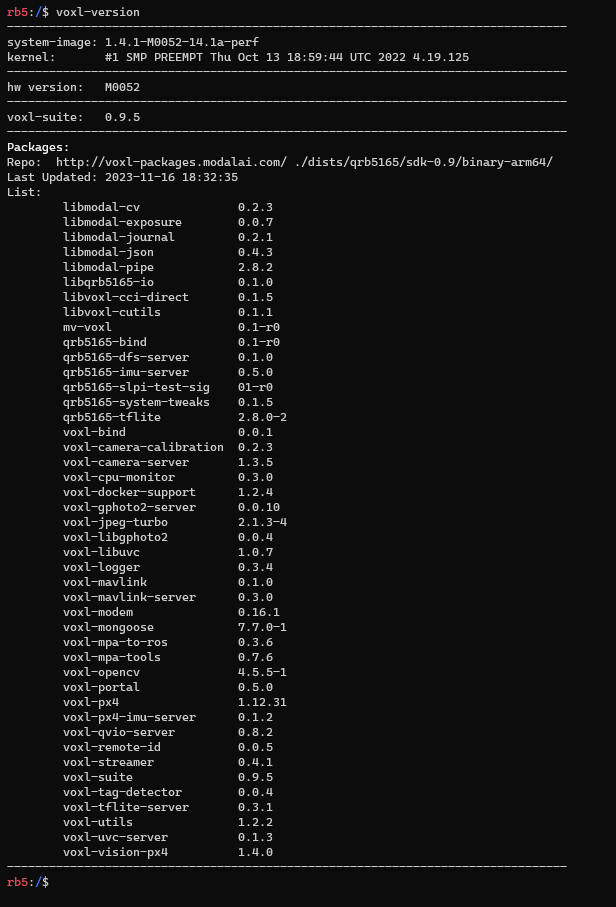
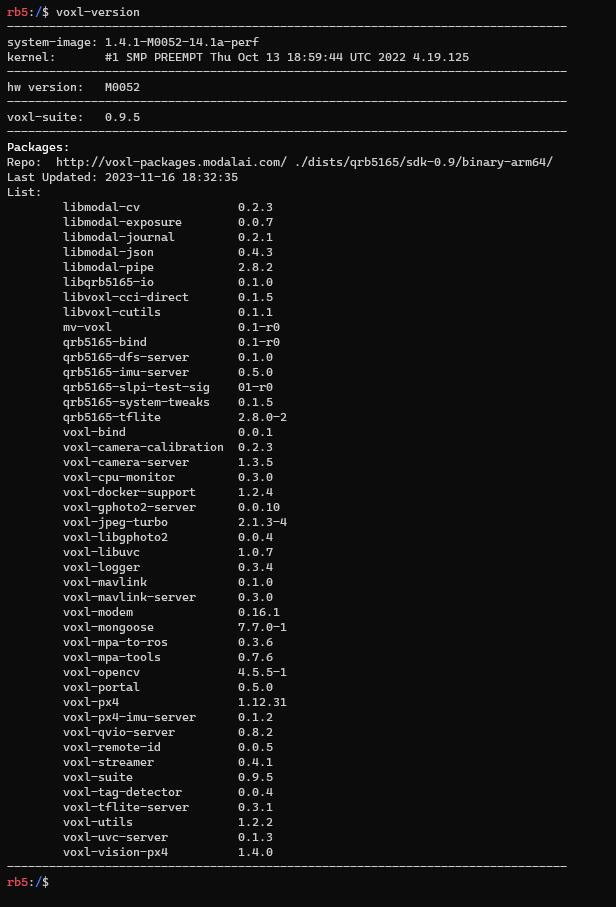
@vjuliani , the tracking camera ( i assume ov7251 or AR0144) is monochrome, so you can not make the image colored. You can install the latest version of the voxl-streamer from dev (nightly builds) http://voxl-packages.modalai.com/dists/qrb5165/dev/binary-arm64/ and it should allow you to encode h265.
Alex