Hi
I have a RB5 with the following SDK version:
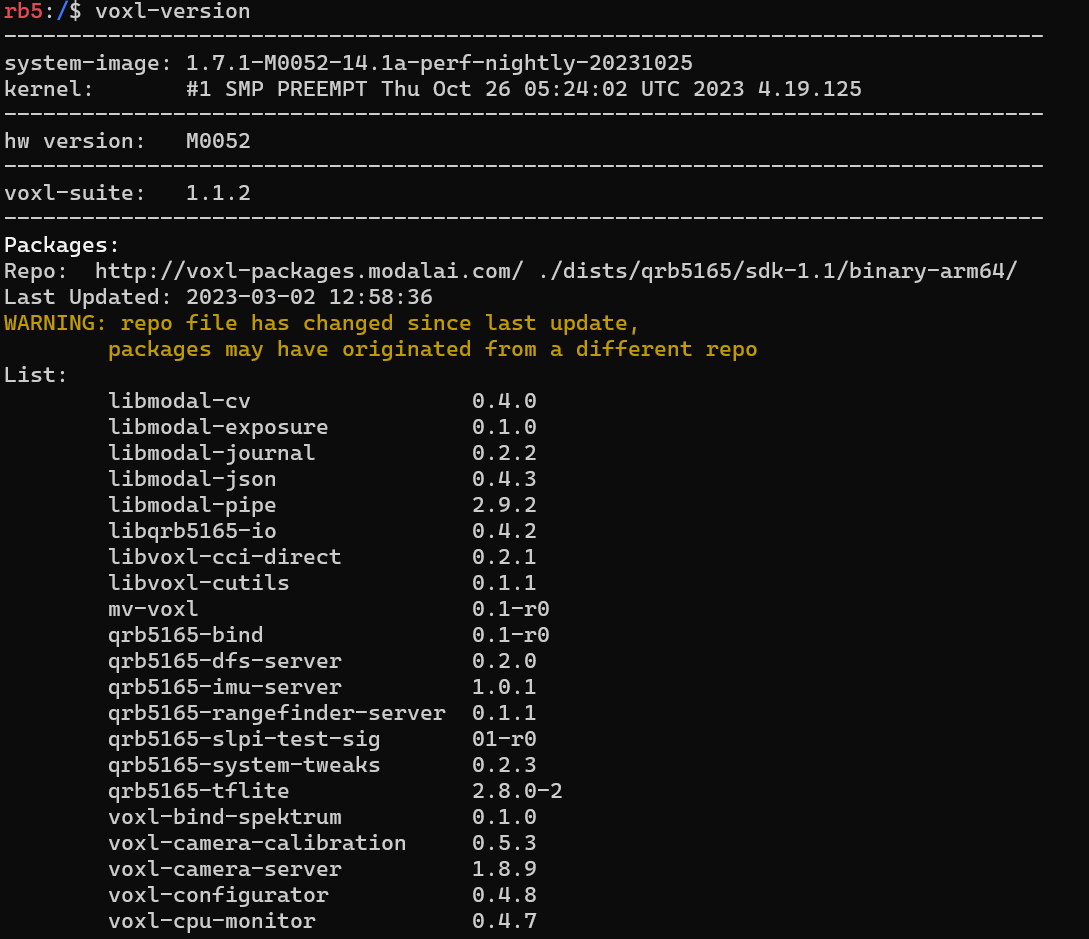
rb5:/$ voxl-version
--------------------------------------------------------------------------------
system-image: 1.7.1-M0052-14.1a-perf-nightly-20231025
kernel: #1 SMP PREEMPT Thu Oct 26 05:24:02 UTC 2023 4.19.125
--------------------------------------------------------------------------------
hw version: M0052
--------------------------------------------------------------------------------
voxl-suite: 1.1.2
--------------------------------------------------------------------------------
Packages:
Repo: http://voxl-packages.modalai.com/ ./dists/qrb5165/sdk-1.1/binary-arm64/
Last Updated: 2025-02-27 20:41:51
List:
libmodal-cv 0.4.0
libmodal-exposure 0.1.0
libmodal-journal 0.2.2
libmodal-json 0.4.3
libmodal-pipe 2.9.2
libqrb5165-io 0.4.2
libvoxl-cci-direct 0.2.1
libvoxl-cutils 0.1.1
mv-voxl 0.1-r0
qrb5165-bind 0.1-r0
qrb5165-dfs-server 0.2.0
qrb5165-imu-server 1.0.1
qrb5165-rangefinder-server 0.1.1
qrb5165-slpi-test-sig 01-r0
qrb5165-system-tweaks 0.2.3
qrb5165-tflite 2.8.0-2
voxl-bind-spektrum 0.1.0
voxl-camera-calibration 0.5.3
voxl-camera-server 1.8.9
voxl-configurator 0.4.8
voxl-cpu-monitor 0.4.7
voxl-docker-support 1.3.0
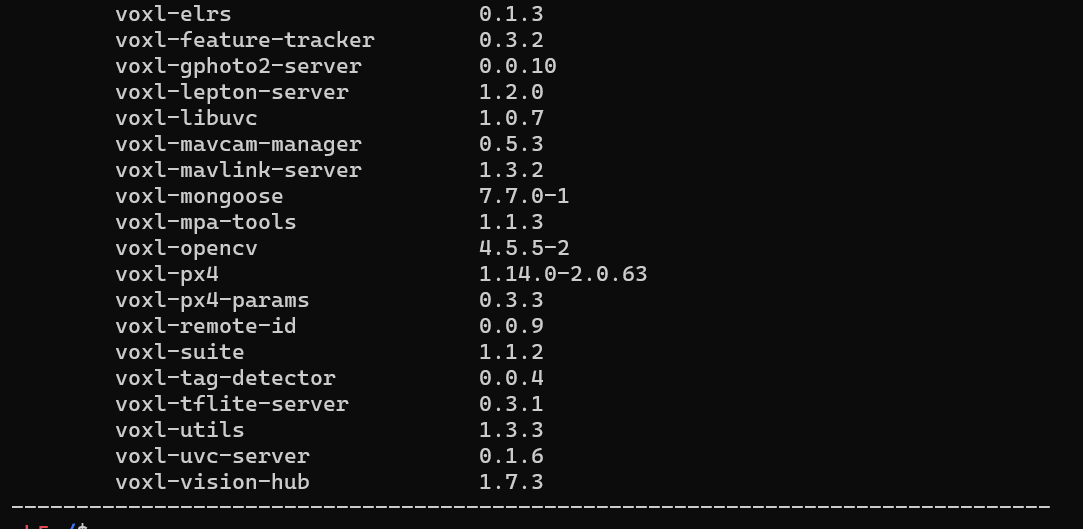
voxl-elrs 0.1.3
voxl-esc 1.3.7
voxl-feature-tracker 0.3.2
voxl-flow-server 0.3.3
voxl-gphoto2-server 0.0.10
voxl-jpeg-turbo 2.1.3-5
voxl-lepton-server 1.2.0
voxl-libgphoto2 0.0.4
voxl-libuvc 1.0.7
voxl-logger 0.3.5
voxl-mavcam-manager 0.5.3
voxl-mavlink 0.1.1
voxl-mavlink-server 1.3.2
voxl-modem 1.0.8
voxl-mongoose 7.7.0-1
voxl-mpa-to-ros 0.3.7
voxl-mpa-tools 1.1.3
voxl-neopixel-manager 0.0.3
voxl-opencv 4.5.5-2
voxl-portal 0.6.3
voxl-px4 1.14.0-2.0.63
voxl-px4-imu-server 0.1.2
voxl-px4-params 0.3.3
voxl-qvio-server 1.0.0
voxl-remote-id 0.0.9
voxl-streamer 0.7.4
voxl-suite 1.1.2
voxl-tag-detector 0.0.4
voxl-tflite-server 0.3.1
voxl-utils 1.3.3
voxl-uvc-server 0.1.6
voxl-vision-hub 1.7.3
--------------------------------------------------------------------------------
I tried to use encoder parameter in voxl-streamer to record h265 encoded videos from the tracking camera but looks like it was not implemented in this SDK version.
Is there any options to record h265 encoded videos from the tracking camera? Also, is the tracking camera video only grey or it is possible to configure it as coloured?
Thanks