Unknown px4 firmware after SDK upgrade
-
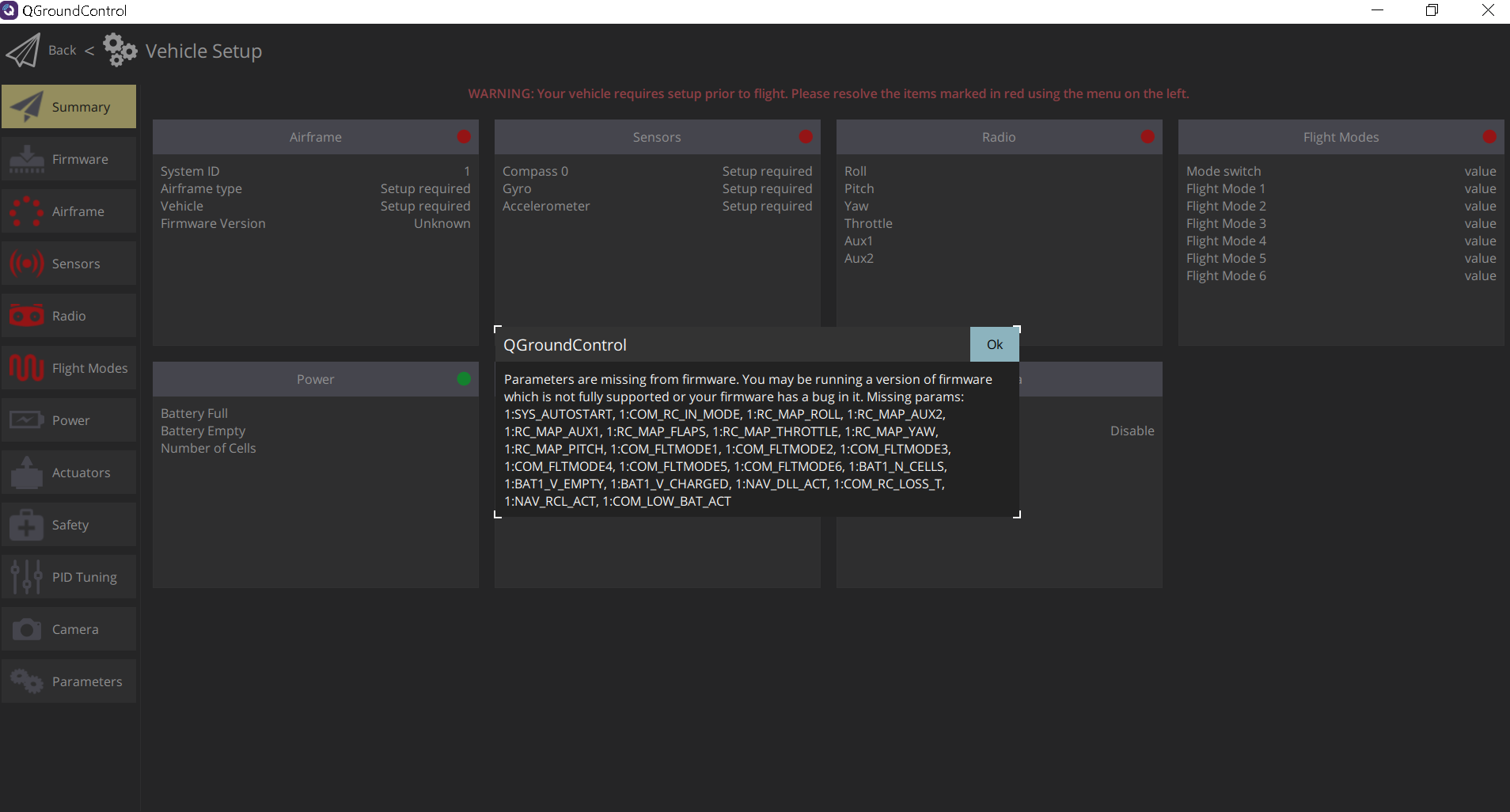
To flash VOXL SDK 1.12, I used an ubuntu 22.04 laptop and did run the install.sh script.
After that I had the error above in QGC.
Is there any more steps necessary to upgrade the SDK and PX4 firmware?
-
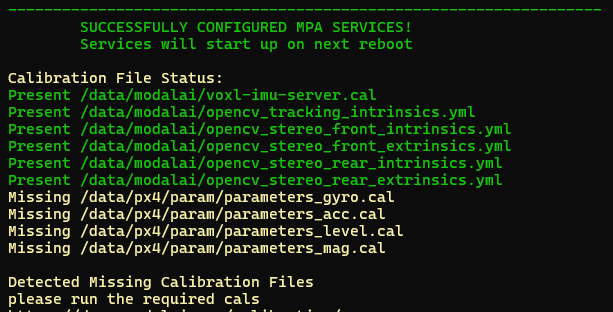
@vjuliani Can you rerun those calibrations?
-
Hi,
After I flashed VOXL SDK 1.1.2 on RB5, the firmware version is unknown in QGC.
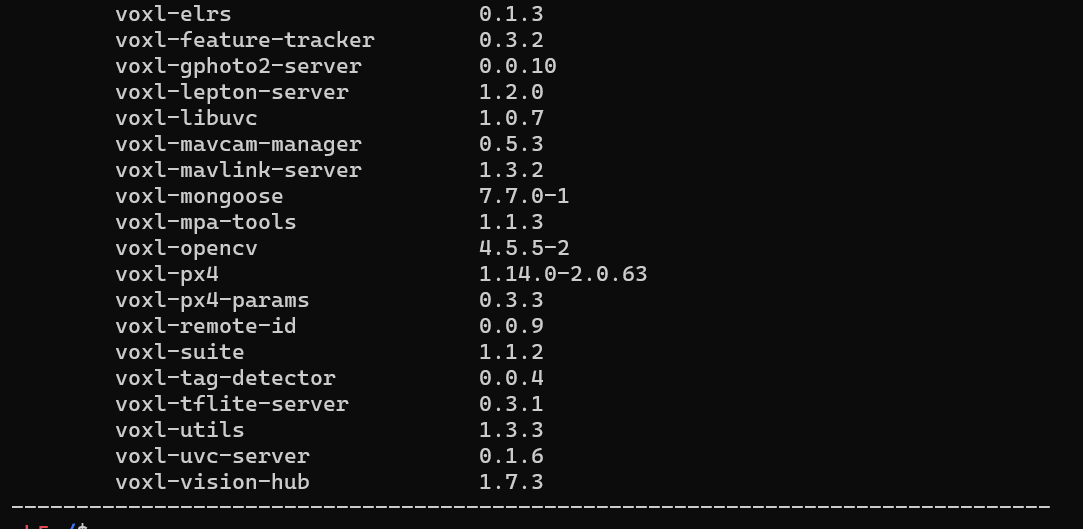
This is voxl-version:
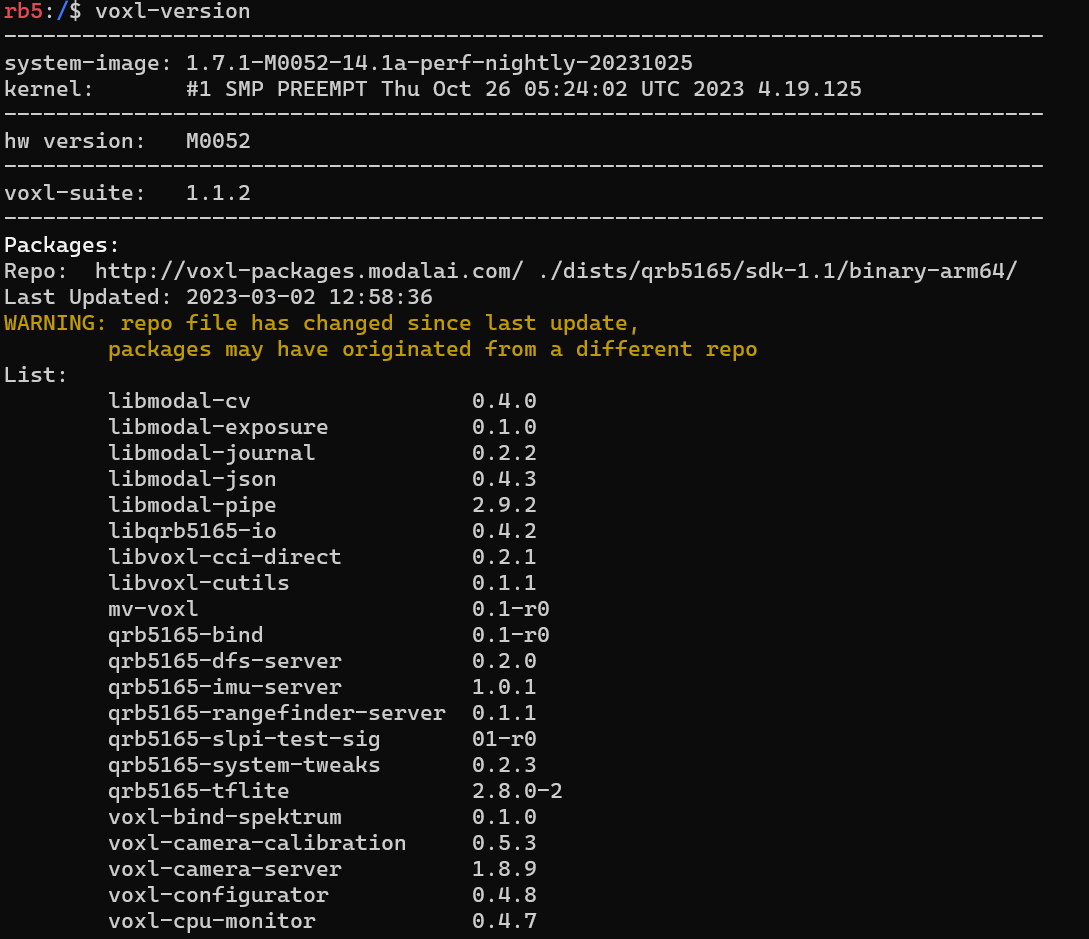
What should I do?
Also, I lost the calibration files of gyroscope, accelerometer, gps, etc. Can you send me them?
@vjuliani QGC may complain about our version of PX4 but that is okay. We have a forked version of PX4 and the parameter sets don't necessarily align perfectly with what QGC wants to see.
-
Hi, @Eric-Katzfey
Thanks for your reply!
I runned voxl-configure-mpa again and the problem was fixed.
Also, I did all the sensors calibration and it worked.
However, even after upgrading VOXL SDK from 0.9.5 to 1.1.2, I am still having the same issue when trying outdoor flight.
The issue is similar to the https://forum.modalai.com/topic/3410/outdoor-navigation-problem one.
When I try an outdoor flight in position mode using EKF2_GPS_CHECK to 245, QGC shows a lot of GPS Speed Accuracy too low failure messages. With that, the drone status remains in Not Ready and it can't fly.
If I try to set EKF2_GPS_CHECK to 1, I get Pre-flight check failure: GPS Position Required messages from QGC. So, the status remains in Not Ready and the drone can't fly.
The only manner I found the drone flight to work was to set COM_ARM_WO_GPS to 1 and use altitude or manual flight mode.
I think it might be a gps hardware issue, like the one in the topic linked above.
The GPS model I had is M8N and I already had this issue with VOXL SDK 0.9.5.
Any suggestions?
-
I created a new topic about the GPS problem https://forum.modalai.com/topic/3612/outdoor-navigation-gps-problem
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login