hi,
I am using all modalai hw. so the ESC is also from modalai's. Is there any documentation on how to add custom application, say bms, to px4 directly?
S
suvasis
@suvasis
Posts
-
Where to write Extended Kalman filter code in modalai's platform -
Where to write Extended Kalman filter code in modalai's platformI use only voxl2. bms to communicate through CAN bus with ESC (so a CAN transreceiver on esc, i don't think this is there currently) or the flight controller or telemetry or the qualcomm processor ab it's power consumption. Just like car uses CAN bus and can transreceiver on various sensors or components.
At the minimum, how can i just gather the SOC info over serial port and apply EKF. Where should this code reside?
Thanks.
suvasis -
Where to write Extended Kalman filter code in modalai's platformhi,
I am working on NXP's RDDRONE-BMS772, battery management system, I would like to integrate EKF to estimate SOC of the battery system. Does modalai support CAN/CAN-FD or serial, i2c, communication to gather bms data related to battery? Also, can Extended kalman filter code be in python or strictly C to be integrated in modalai?
Thanks.
suvasis -
Driver for Immervision to purchase the UAV Low-light navigation camera, Imvisio-ML Camera Module, Black & White (mono)@suvasis pls read modal.com as modalai.com
-
Driver for Immervision to purchase the UAV Low-light navigation camera, Imvisio-ML Camera Module, Black & White (mono)hi,
I buy voxl2 hardware from modal.com and custom build my drone. I am talking to Immervision to purchase the UAV Low-light navigation camera, Imvisio-ML Camera Module, Black & White (mono), They are saying modal.com has the driver for this camera for voxl2. Where is the drive located?
Thanks.
suvasis -
vscode remote ssh on voxl2Thanks. I missed it.
-
vscode remote ssh on voxl2vscode ->
I am following instruction in the video: https://docs.modalai.com/voxl2-vs-code-user-guide/
The vscode directory structure as per the video is :
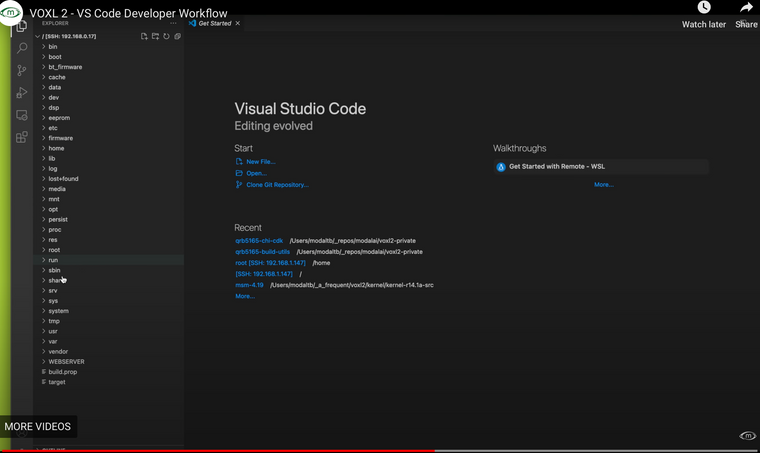
But I see the following:
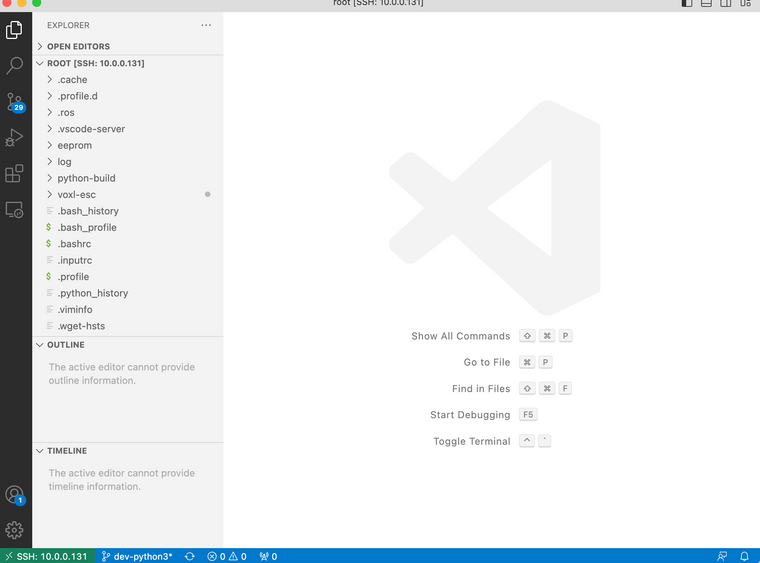
Why not all the folders are showing in my environment?
-
Implementation of follow me feature on VOXL or VOXL2PX4-user_guide/en/flight_modes/follow_me.md at main · PX4/PX4-user_guide
PX4 User Guide Sources (ARCHIVED). Contribute to PX4/PX4-user_guide development by creating an account on GitHub.

GitHub (github.com)
-
Implementation of follow me feature on VOXL or VOXL2 -
Blues Wireless Notecard and Modalai flight core.The Blues Wireless Notecard and Notecarrier provide a convenient way to add cellular connectivity and GPS. The Notecard is a cellular and GPS-enabled module, the Notecarrier is a board that makes it easy to interface the Notecard with microcontroller or development platform. If I want to integrate Blues Wireless notecard (https://dev.blues.io) and the ModalAI flight core, is there any documentation to integrate external component with modalai.
Thanks.
suvasis -
QGC sensors - compass remains redThankyou Chris, looks like QGC estimated heading information derived from other sensors, like the gyroscope and accelerometer, rather than a magnetometer. I got false idea from QGC.
-
QGC sensors - compass remains redhi Eric,
I have not hooked up the GPS to my vehicle.I run the following commands:
(do't see magnetometer anywhere)
voxl2:~$ sudo journalctl -u voxl-px4 -f-- Logs begin at Tue 2022-09-06 03:18:07 UTC. --
Mar 21 17:49:39 m0054 bash[1748]: INFO [muorb] SLPI: Advertising remote topic vehicle_command
Mar 21 17:49:39 m0054 bash[1748]: INFO [commander] Handling Commander command 176
Mar 21 17:49:39 m0054 bash[1748]: INFO [muorb] SLPI: Advertising remote topic vehicle_command_ack
Mar 21 17:49:39 m0054 bash[1748]: INFO [mavlink] mode: Onboard, data rate: 100000 B/s on udp port 14556 remote port 14557
Mar 21 17:49:39 m0054 bash[1748]: INFO [muorb] SLPI: Marking DeviceNode(vehicle_command) as advertised in process_remote_topic
Mar 21 17:49:39 m0054 bash[1748]: INFO [px4] Startup script returned successfully
Mar 21 17:49:39 m0054 bash[1748]: INFO [mavlink] partner IP: 127.0.0.1
Mar 21 17:49:39 m0054 bash[1748]: INFO [muorb] SLPI: Advertising remote topic telemetry_status
Mar 21 17:49:39 m0054 bash[1748]: INFO [PreFlightCheck] Failed EKF health preflight check while waiting for filter to settle
Mar 21 17:49:39 m0054 bash[1748]: INFO [muorb] SLPI: Advertising remote topic timesync_statusand
(also don't see any address)
voxl2:~$ sudo i2cdetect -y -r 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- -- -
QGC sensors - compass remains redhi Eric
For magnetometer rotation it is specified as the -R option on the start line in /etc/modalai/voxl-px4.config
IS it the magnetometer not an inherent part of the VOXL2 board? Is it part of GPS? I have not attached GPS to my drone yet, For compass do I need GPS?
Thanks.
suvasis -
QGC sensors - compass remains redhi Eric,
I connected using wifi. /usr/bin/voxl-px4 is the command I am using.Can you point me to the documentation? Also should I use usbc only and not wifi?
Thanks.
suvasis -
QGC sensors - compass remains redhi Eric,
I am using VOXL
 2 Flight Deck and 4-in-1 esc which I bought separately. I wired up the esc and voxl2 and the drone is holybro model. so it's a custom made drone.
2 Flight Deck and 4-in-1 esc which I bought separately. I wired up the esc and voxl2 and the drone is holybro model. so it's a custom made drone.Thanks.
suvasis -
QGC sensors - compass remains redhi eric,
From QGC->Sensors
Passed
- Gyroscope
- Accelerometer
- Level Horizon
However, compass remains red even after the vehicle in all the 6 orientations images are shown in green.
When I click "ok", the compass remains red, I repeat the orientation process again, the compass redness doesn't go away. I tried via wifi as well as USB c direct connection. This hasn't helped.
Thanks.
suvasis -
QGC sensors - compass remains redhi,
QGC sensors - compass remains red even after the vehicle in all the 6 orientations images are shown in green.
I rebooted many times and set the compass orientations to green images, still the compass remain red.
How do I resolve this?
Thanks.
suvasis -
vehicle did not respond to command: MAV_CMD_DO_MOTOR_TESThi Eric,
Is there any update on the issue?
Thanks.
suvasis -
vehicle did not respond to command: MAV_CMD_DO_MOTOR_TESTI bought calibrated voxl2 and 4-in-1 esc separately and attached to my own holybro drone. I wired up the esc and voxl2.
-
All the motor testing works fine as the result shows below:
-
after the test,
#when done, restore original libpx4.so
cd /usr/lib/rfsa/adsp
rm libpx4.so
cp libpx4.so.bak libpx4.so
systemctl enable voxl-px4
reboot
I started the QGC, i see the sensor details etc. Here i click on the motors on the left side of QGC, then I start motors one by one. after a min or so i see "vehicle did not respond to command: MAV_CMD_DO_MOTOR_TEST" this message and motor never works this way.
Is there more settings required here as per, modalai documentation doesn't point to this though https://docs.qgroundcontrol.com/master/en/SettingsView/General.html?
Or there any missing information? The modalai documentation is not clear at this stage, https://docs.modalai.com/voxl2-px4-quickstart/.
motor testing Test results:
Installation Instructions for VOXL2
#stop and disable PX4 while using voxl-esc tools
systemctl stop voxl-px4 && systemctl disable voxl-px4#temporarily move libpx4.so and create symlink for slpi bridge to libpx4.so
#this is required because currently the slpi application loader looks for libpx4.so (hardcoded)
cd /usr/lib/rfsa/adsp
mv libpx4.so libpx4.so.bak
ln -s ./libslpi_uart_bridge_slpi.so ./libpx4.so#reboot VOXL2
rebootLooks now it works after I re-did the steps:
result:
voxl2:~$
voxl2:~$ cd /usr/lib/rfsa/adsp
voxl2:/usr/lib/rfsa/adsp$ ls -l libpx4.so
lrwxrwxrwx 1 root root 29 Mar 16 17:41 libpx4.so -> ./libslpi_uart_bridge_slpi.so
voxl2:/usr/lib/rfsa/adsp$ cd
voxl2:~$ pwd
/home/root
voxl2:~$ cd voxl-esc/tools/
voxl2:~/voxl-esc/tools(dev-python3)$ ./voxl-esc-scan.py
Detected Python version : 3.6.9 (default, Jun 29 2022, 11:45:57)
[GCC 8.4.0]
Found voxl-esc tools bin version: 1.1
VOXL Platform: M0054
Detected VOXL2 M0054 or M0104!
INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 250000
INFO: ESC(s) detected on port: /dev/slpi-uart-2, baud rate: 250000
INFO: Detected protocol: firmware
INFO: Additional Information:
INFO: ---------------------
ID : 0
Board : version 34: ModalAi 4-in-1 ESC V2 RevC (M0117)
UID : 0x203034305743570C00360052
Firmware : version 36, hash f75f1fdb
Bootloader : version 183, hash 25317f42ID : 1
Board : version 34: ModalAi 4-in-1 ESC V2 RevC (M0117)
UID : 0x203034305743570C0036004C
Firmware : version 36, hash f75f1fdb
Bootloader : version 183, hash 25317f42ID : 2
Board : version 34: ModalAi 4-in-1 ESC V2 RevC (M0117)
UID : 0x203034305743570C0036004B
Firmware : version 36, hash f75f1fdb
Bootloader : version 183, hash 25317f42ID : 3
Board : version 34: ModalAi 4-in-1 ESC V2 RevC (M0117)
UID : 0x203034305743570C0042001C
Firmware : version 36, hash f75f1fdb
Bootloader : version 183, hash 25317f42 -
-
vehicle did not respond to command: MAV_CMD_DO_MOTOR_TESTI connected the qgroundcontrol. I see the parameters set correctly. However, when doing motor testing I see the message pops up:
vehicle did not respond to command: MAV_CMD_DO_MOTOR_TEST
How do I resolve this?
Thanks.
suvasis