@Alex-Kushleyev This unit was sent in on RMA 796.
R
roy.crosthwaite
@roy.crosthwaite
Posts
-
Bricked VOXL2 on Starling 2 Max -
Bricked VOXL2 on Starling 2 MaxGreetings,
I have a fully bricked VOXL2 on a Starling 2 Max. I have gone through the forum and documents processes without success and have concluded that there is way more wrong than a typical unbricking can fix. Give you a little history here... This thing has bricked a couple of times and I was able to easily make a full recovery. I updated the SDK to 1.5.0 after the first bricking and everything seemed to be OK. I was going to test a new GPS module (issue submitted under a different forum topic) and had the WiFi set to AP mode so I could connect wirelessly. I powered everything up on the bench, connected via ADB and ran voxl-inspect-gps to see if the new module was detected, and it was. Thinking everything was GTG, I powered down and took the drone outside to verify that it could see satellites. Powered it up and waited for the SSID to become visible and it never did, even after a couple of power cycles. So, back to the bench with it.
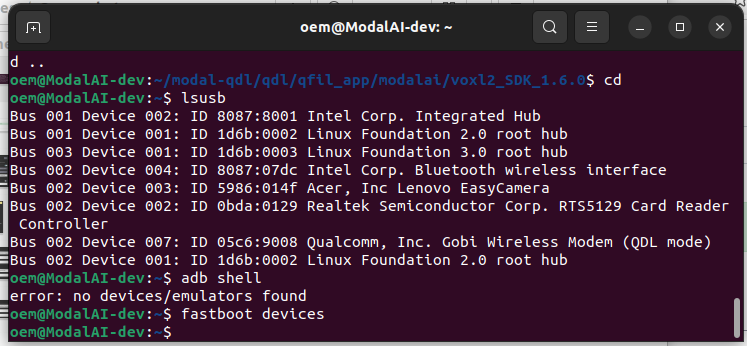
I attempted to do yet another unbricking only to discover that I couldn't communicate with it via USB. adb shell returns no device found and putting it into fastboot (presumably) and fastboot doesn't detect a device either. The only way I see the device is with lsusb or the web interface shown below.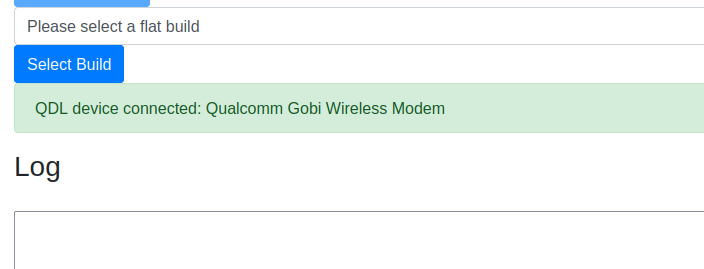
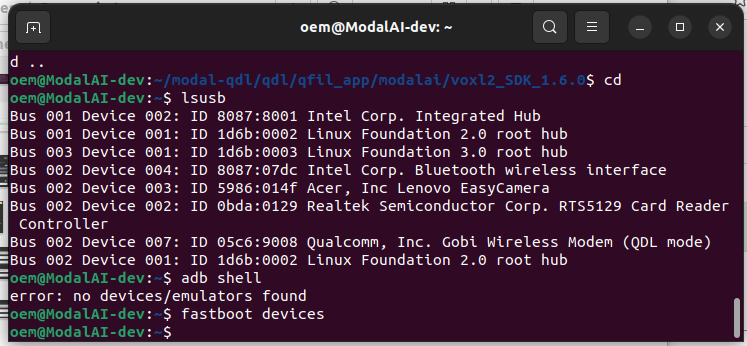
I find it interesting that it can be detected but not respond to external commands - the lights are on but nobody is home.So, where do I go from here?
Current configuration:
system-image: 1.8.04-M0054-14.1a-perf
kernel: #1 SMP PREEMPT Mon Mar 24 22:31:58 UTC 2025 4.19.125
hw platform: M0054
mach.var: 1.0.1
SKU: MRB-D0012-4-V2-C29-T9-M24-X0
voxl-suite: 1.5.0 -
GPS not connecting@Eric-Katzfey Hello Eric, I was finally able to swap out the GPS for a known good unit and the one in question is definitely dead. I presume this can be returned on an RMA. The drone was purchased on Order Number 6839. Let me know the next steps.
Thanks. -
Bricked VOXL2@N-Chen I tried the webUI and the command line and as near as I can tell the webUI uses lsusb (or something along those lines) to detect the presence of the board. The install.sh uses adb or fastboot to detect the board and will sit waiting until the board is detected or CTL C is sent. My guess is the usb controller interface is alive and reporting but everything beyond it is dead.
-
Bricked VOXL2Greetings,
I have a fully bricked VOXL2 on a Starling 2 Max. I have gone through the forum and documents processes without success and have concluded that there is way more wrong than a typical unbricking can fix. Give you a little history here... This thing has bricked a couple of times and I was able to easily make a full recovery. I updated the SDK to 1.5.0 after the first bricking and everything seemed to be OK. I was going to test a new GPS module (issue submitted under a different forum topic) and had the WiFi set to AP mode so I could connect wirelessly. I powered everything up on the bench, connected via ADB and ran voxl-inspect-gps to see if the new module was detected, and it was. Thinking everything was GTG, I powered down and took the drone outside to verify that it could see satellites. Powered it up and waited for the SSID to become visible and it never did, even after a couple of power cycles. So, back to the bench with it.
I attempted to do yet another unbricking only to discover that I couldn't communicate with it via USB. adb shell returns no device found and putting it into fastboot (presumably) and fastboot doesn't detect a device either. The only way I see the device is with lsusb or the web interface shown below.
I find it interesting that it can be detected but not respond to external commands - the lights are on but nobody is home.So, where do I go from here?
Current configuration:
system-image: 1.8.04-M0054-14.1a-perf
kernel: #1 SMP PREEMPT Mon Mar 24 22:31:58 UTC 2025 4.19.125
hw platform: M0054
mach.var: 1.0.1
SKU: MRB-D0012-4-V2-C29-T9-M24-X0
voxl-suite: 1.5.0 -
Battery warrantyHello support forum,
We received 2 of the Starling 2 Max drones in Aug this year and I have a battery that has failed, as in zero volts out and the charger does not recognize it when I plug in to charge. I presume there is a warranty for these. What is the process for getting a replacement?
Thanks -
GPS not connecting@Eric-Katzfey never mind about the cable, I found them on Amazon...
-
GPS not connecting@Eric-Katzfey I would if I could. The 2nd unit went home with one of our guys 4 hours away (flying that is). I am having him ship it to me so I can swap it. In the mean time, I wanted to see if there is a work-around for the interference problem. I did see some creative ideas to mitigate the interference at least partially in one of the posts... Also, are cables with a connector on one end and flying leads available for the GPS modules? It would be nice to be able to pull the receiver off and test with the UBLOX software.
Thanks. -
GPS not connectingHello ModalAI Support,
We recently purchased qty 2 Starling 2 Max with the 5G add-on modem. Both units initially were working but one now has an apparent GPS module failure as I cannot connect to it. Also, after reading through several posts, it appears that we're not the only ones having this problem.As for the configuration of our units, here's what we have:
system-image: 1.8.04-M0054-14.1a-perf
kernel: #1 SMP PREEMPT Mon Mar 24 22:31:58 UTC 2025 4.19.125
hw platform: M0054
mach.var: 1.0.1
SKU: MRB-D0012-4-V2-C29-T9-M24-X0
voxl-suite: 1.5.0I read through and performed all the suggested troubleshooting steps that I found in several previous posts for GPS problems. The most revealing test is when I disable voxl-px4 from loading at startup and started it manually. There are a few errors thrown as it executes but when it tried to connect to the GPS it goes into an infinite loop trying all defined GPS UART baudrates and never connects. All cables and connectors have been checked and everything looks good physically. I also checked the power going into the GPS module and it is at the required 5VDC. I noticed a couple of things on the circuit side of the GPS board - a 3.3VDC test point and what appears to be a button cell soldered to the board. The voltage at the test point measured 2.57 VDC and with the power off I measured .25 volts on the assumed button cell. Of course, I go out to the 3DR website to track down information only to discover that the "Documentation is coming soon". 2.57VDC is definitely too low for something requiring 3.3VDC to operate.
Before we bought these, we were told that there was an interference issue with the 5G modems and the GPS. I read through post https://forum.modalai.com/topic/4226/starling-2-max-no-gps-data?_=1756238568725 and gather that this problem might be an underlying issue with the VOXL 2 (and other boards plugged into it). Has any progress been made on this?
Anyway, with all that said, it appears that the GPS is DOA. Below is the output from the voxl-px4 script when I run it manually.
I appreciate any help you can give.system-image: 1.8.04-M0054-14.1a-perf
kernel: #1 SMP PREEMPT Mon Mar 24 22:31:58 UTC 2025 4.19.125
────────────────────────────────────────────────────────────────────────────────
hw platform: M0054
mach.var: 1.0.1
SKU: MRB-D0012-4-V2-C29-T9-M24-X0
────────────────────────────────────────────────────────────────────────────────
voxl-suite: 1.5.0
────────────────────────────────────────────────────────────────────────────────
current IP: wlan0: 192.168.8.1
────────────────────────────────────────────────────────────────────────────────starling2-max (D0012):/$ voxl-px4
[INFO] Reading from /etc/modalai/voxl-px4.conf
Found DSP signature file
[INFO] Daemon mode enabled
AIRFRAME=MULTICOPTER
GPS=AUTODETECT
RC=GHST
ESC=VOXL_ESC
POWER MANAGER=NONE
AIRSPEED SENSOR=NONE
DISTANCE SENSOR=NONE
OSD=DISABLE
DAEMON_MODE=ENABLE
SENSOR_CAL=ACTUAL
ARTIFACT_MODE=DISABLE
EXTRA STEPS:
INFO [px4] mlockall() enabled. PX4's virtual address space is locked into RAM.
INFO [px4] assuming working directory is rootfs, no symlinks needed.
INFO [muorb] Got muorb init command
Sending initialization request
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
INFO [muorb] [modules__muorb__slpi] muorb aggregator thread running
INFO [muorb] muorb protobuf initalize method succeeded
INFO [muorb] succesfully did ADVERTISE_TEST_TYPE
INFO [muorb] [tasks] Creating pthread test_MUORB
INFO [muorb] [tasks] Successfully created px4 task PX4_test_MUORB with tid 2097656
INFO [muorb] succesfully did SUBSCRIBE_TEST_TYPE
INFO [muorb] [tasks] Creating pthread test_MUORB
INFO [muorb] [tasks] Successfully created px4 task PX4_test_MUORB with tid 2097655
INFO [muorb] succesfully did TOPIC_TEST_TYPE
INFO [muorb] [tasks] Creating pthread test_MUORB
INFO [muorb] [tasks] Successfully created px4 task PX4_test_MUORB with tid 2097654
INFO [muorb] succesfully did UNSUBSCRIBE_TEST_TYPE
INFO [muorb] [tasks] Creating pthread test_MUORB
INFO [muorb] [tasks] Successfully created px4 task PX4_test_MUORB with tid 2097653
INFO [muorb] muorb test passed
| ___ \ \ \ / / / |
| |/ / \ V / / /| |
| __/ / \ / /| |
| | / /^\ \ ___ |
_| / / |_/px4 starting.
INFO [muorb] [uORB] Advertising remote topic log_message
INFO [px4] startup script: /bin/sh /usr/bin/voxl-px4-start 0
INFO [parameters] Starting param sync THREAD
AIRFRAME: MULTICOPTER
GPS: AUTODETECT
RC: GHST
ESC: VOXL_ESC
POWER MANAGER: NONE
AIRSPEED SENSOR: NONE
DISTANCE SENSOR: NONE
OSD: DISABLE
ARTIFACT_MODE: DISABLE
EXTRA STEPS:
Running on M0054
INFO [muorb] [parameters] Starting param sync THREAD
INFO [muorb] [qshell] before starting the qshell_entry task
INFO [muorb] [tasks] Creating pthread qshell
INFO [muorb] [qshell] qshell entry.....
INFO [muorb] [tasks] Successfully created px4 task PX4_qshell with tid 2097652
INFO [muorb] [qshell] Init app map initialized
INFO [muorb] [qshell] after starting the qshell_entry task
INFO [param] selected parameter default file /data/px4/param/parameters
INFO [muorb] [uORB] Marking DeviceNode(parameter_client_reset_request) as advertised in process_remote_topic
INFO [uORB] Marking DeviceNode(parameter_client_reset_response) as advertised in process_remote_topic
INFO [muorb] [uORB] Advertising remote topic parameter_update
INFO [muorb] [uORB] Marking DeviceNode(parameter_client_set_value_request) as advertised in process_remote_t
INFO [uORB] Marking DeviceNode(parameter_server_set_used_request) as advertised in process_remote_topic
INFO [muorb] [uORB] Marking DeviceNode(parameter_server_set_used_response) as advertised in process_remote_t
INFO [uORB] Marking DeviceNode(parameter_client_set_value_response) as advertised in process_remote_topic
INFO [parameters] BSON document size 3367 bytes, decoded 3367 bytes (INT32:47, FLOAT:109)
Starting IMU driver with no rotation
INFO [qshell] Send cmd: 'icm42688p start -s'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: icm42688p start -s
INFO [muorb] [qshell] arg0 = 'icm42688p'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] arg2 = '-s'
INFO [muorb] [drivers__device] *** SPI Device ID 0x26000a 2490378
INFO [uORB] Advertising remote topic sensor_accel
INFO [uORB] Advertising remote topic sensor_gyro
INFO [muorb] [icm42688p] ICM42688P::probe successful!
INFO [muorb] [drivers__device] on SPI bus 1
INFO [muorb] icm42688p #0 on SPI bus 1
INFO [muorb]INFO [muorb] [icm42688p] >>> ICM42688P this: b2601168
INFO [muorb] [qshell] Ok executing command: icm42688p start -s
INFO [uORB] Advertising remote topic qshell_retval
INFO [muorb] [icm42688p] >>> ICM42688P this: b2601168
INFO [qshell] qshell return value timestamp: 399407608, local time: 399410543
INFO [muorb] [icm42688p] >>> ICM42688P this: b2601168
INFO [muorb] [drivers__device] Register interrupt b214ec48 e61ebf5c b2601168
INFO [uORB] Advertising remote topic sensor_gyro_fifo
INFO [uORB] Advertising remote topic sensor_accel_fifo
INFO [qshell] Send cmd: 'icp101xx start -I -b 5'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: icp101xx start -I -b 5
INFO [muorb] [qshell] arg0 = 'icp101xx'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] arg2 = '-I'
INFO [muorb] [qshell] arg3 = '-b'
INFO [muorb] [qshell] arg4 = '5'
INFO [uORB] Advertising remote topic imu_server
INFO [muorb] [drivers__device] *** I2C Device ID 0xb76329 12018473
INFO [muorb] [drivers__device] Set up I2C bus mutex for bus 5
INFO [muorb] icp101xx #0 on I2C bus 5
INFO [muorb] address 0x63
INFO [muorb]INFO [muorb] [qshell] Ok executing command: icp101xx start -I -b 5
INFO [qshell] qshell return value timestamp: 399439219, local time: 399440018
INFO [qshell] Send cmd: 'temperature_compensation start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: temperature_compensation start
INFO [muorb] [qshell] arg0 = 'temperature_compensation'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic sensor_correction
INFO [muorb] [icm42688p] >>> ICM42688P this: b2601168
INFO [muorb] [qshell] Ok executing command: temperature_compensation start
INFO [qshell] qshell return value timestamp: 399593065, local time: 399595876
Looking for qmc5883l magnetometer
INFO [qshell] Send cmd: 'qmc5883l start -R 10 -X -b 1'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: qmc5883l start -R 10 -X -b 1
INFO [muorb] [qshell] arg0 = 'qmc5883l'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] arg2 = '-R'
INFO [muorb] [qshell] arg3 = '10'
INFO [muorb] [qshell] arg4 = '-X'
INFO [muorb] [qshell] arg5 = '-b'
INFO [muorb] [qshell] arg6 = '1'
INFO [muorb] [drivers__device] *** I2C Device ID 0x80d09 527625
INFO [muorb] [drivers__device] Set up I2C bus mutex for bus 1
INFO [muorb] qmc5883l #0 on I2C bus 1
INFO [muorb] (external)
INFO [muorb] address 0xD
INFO [muorb] rotation 10
INFO [muorb]INFO [muorb] [qshell] Ok executing command: qmc5883l start -R 10 -X -b 1
INFO [qshell] qshell return value timestamp: 399641432, local time: 399643756
Looking for ist8310 magnetometer
INFO [uORB] Advertising remote topic sensor_baro
INFO [qshell] Send cmd: 'ist8310 start -R 10 -X -b 1'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: ist8310 start -R 10 -X -b 1
INFO [muorb] [qshell] arg0 = 'ist8310'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] arg2 = '-R'
INFO [muorb] [qshell] arg3 = '10'
INFO [muorb] [qshell] arg4 = '-X'
INFO [muorb] [qshell] arg5 = '-b'
INFO [muorb] [qshell] arg6 = '1'
INFO [muorb] [drivers__device] *** I2C Device ID 0x60e09 396809
INFO [muorb] [drivers__device] Set up I2C bus mutex for bus 1
ERROR [muorb] [drivers__device] i2c probe failed
INFO [muorb] [SPI_I2C] PX4_qshell: no instance started (no device on bus?)
ERROR [muorb] [qshell] Failed to execute command: ist8310 start -R 10 -X -b 1
INFO [qshell] cmd returned with: -1
INFO [qshell] qshell return value timestamp: 399679721, local time: 399683151
ERROR [qshell] Command failed
Looking for ist8308 magnetometer
INFO [qshell] Send cmd: 'ist8308 start -R 12 -X -b 1'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: ist8308 start -R 12 -X -b 1
INFO [muorb] [qshell] arg0 = 'ist8308'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] arg2 = '-R'
INFO [muorb] [qshell] arg3 = '12'
INFO [muorb] [qshell] arg4 = '-X'
INFO [muorb] [qshell] arg5 = '-b'
INFO [muorb] [qshell] arg6 = '1'
INFO [muorb] [drivers__device] *** I2C Device ID 0xb0c09 723977
INFO [muorb] [drivers__device] Set up I2C bus mutex for bus 1
ERROR [muorb] [drivers__device] i2c probe failed
INFO [muorb] [SPI_I2C] PX4_qshell: no instance started (no device on bus?)
ERROR [muorb] [qshell] Failed to execute command: ist8308 start -R 12 -X -b 1
INFO [qshell] cmd returned with: -1
INFO [qshell] qshell return value timestamp: 399724506, local time: 399725746
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'gps start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: gps start
INFO [muorb] [qshell] arg0 = 'gps'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [tasks] Creating pthread gps
INFO [muorb] [tasks] Successfully created px4 task PX4_gps with tid 2097647
INFO [muorb] [qshell] Ok executing command: gps start
INFO [qshell] qshell return value timestamp: 399763498, local time: 399764414
Looking for ncp5623c RGB LED
INFO [muorb] [gps] GPS UART baudrate set to 115200
INFO [qshell] Send cmd: 'rgbled_ncp5623c start -X -b 1 -f 400 -a 56'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: rgbled_ncp5623c start -X -b 1 -f 400 -a 56
INFO [muorb] [qshell] arg0 = 'rgbled_ncp5623c'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] arg2 = '-X'
INFO [muorb] [qshell] arg3 = '-b'
INFO [muorb] [qshell] arg4 = '1'
INFO [muorb] [qshell] arg5 = '-f'
INFO [muorb] [qshell] arg6 = '400'
INFO [muorb] [qshell] arg7 = '-a'
INFO [muorb] [qshell] arg8 = '56'
INFO [muorb] [drivers__device] *** I2C Device ID 0x7b3809 8075273
INFO [muorb] [drivers__device] Set up I2C bus mutex for bus 1
INFO [muorb] [drivers__device] Set i2c address 0x38, fd 4
ERROR [muorb] [drivers__device] i2c probe failed
INFO [muorb] [SPI_I2C] PX4_qshell: no instance started (no device on bus?)
ERROR [muorb] [qshell] Failed to execute command: rgbled_ncp5623c start -X -b 1 -f 400 -a 56
INFO [qshell] cmd returned with: -1
INFO [qshell] qshell return value timestamp: 399803230, local time: 399805491
ERROR [qshell] Command failed
Starting VOXL ESC driver
INFO [uORB] Advertising remote topic sensor_mag
INFO [qshell] Send cmd: 'voxl_esc start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: voxl_esc start
INFO [muorb] [qshell] arg0 = 'voxl_esc'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic actuator_outputs
INFO [muorb] [voxl_esc] Starting VOXL ESC driver
INFO [muorb] [voxl_esc] Params: VOXL_ESC_CONFIG: 1
INFO [muorb] [voxl_esc] Params: VOXL_ESC_MODE: 0
INFO [muorb] [voxl_esc] Params: VOXL_ESC_BAUD: 2000000
INFO [muorb] [voxl_esc] Params: VOXL_ESC_FUNC1: 102
INFO [muorb] [voxl_esc] Params: VOXL_ESC_FUNC2: 103
INFO [muorb] [voxl_esc] Params: VOXL_ESC_FUNC3: 101
INFO [muorb] [voxl_esc] Params: VOXL_ESC_FUNC4: 104
INFO [muorb] [voxl_esc] Params: VOXL_ESC_SDIR1: 0
INFO [muorb] [voxl_esc] Params: VOXL_ESC_SDIR2: 0
INFO [muorb] [voxl_esc] Params: VOXL_ESC_SDIR3: 0
INFO [muorb] [voxl_esc] Params: VOXL_ESC_SDIR4: 0
INFO [muorb] [voxl_esc] Params: VOXL_ESC_RPM_MIN: 2000
INFO [muorb] [voxl_esc] Params: VOXL_ESC_RPM_MAX: 12000
INFO [muorb] [voxl_esc] Params: VOXL_ESC_T_PERC: 90
INFO [muorb] [voxl_esc] Params: VOXL_ESC_T_DEAD: 20
INFO [muorb] [voxl_esc] Params: VOXL_ESC_T_EXPO: 35
INFO [muorb] [voxl_esc] Params: VOXL_ESC_T_MINF: 0.150000
INFO [muorb] [voxl_esc] Params: VOXL_ESC_T_COSP: 0.990000
INFO [muorb] [voxl_esc] Params: VOXL_ESC_VLOG: 1
INFO [muorb] [voxl_esc] Params: VOXL_ESC_PUB_BST: 1
INFO [muorb] [voxl_esc] Params: VOXL_ESC_T_WARN: 0
INFO [muorb] [voxl_esc] Params: VOXL_ESC_T_OVER: 0
INFO [muorb] [voxl_esc] Params: GPIO_CTL_CH: 0
INFO [muorb] [qshell] Ok executing command: voxl_esc start
INFO [muorb] [voxl_esc] Opening UART ESC device 2, baud rate 2000000
INFO [muorb] [voxl_esc] Successfully opened UART ESC device
INFO [muorb] [voxl_esc] Detecting ESCs...
INFO [muorb] [voxl_esc] ESC ID : 0
INFO [muorb] [voxl_esc] Board Type : 40: ModalAi 4-in-1 ESC (M0129-3)
INFO [muorb] [voxl_esc] Unique ID : 0x2039333557555311000E001D
INFO [qshell] qshell return value timestamp: 399982295, local time: 399985088
INFO [muorb] [voxl_esc] Firmware : version 39, hash 9c6233d6
INFO [muorb] [voxl_esc] Bootloader : version 184, hash 10bf24c8
INFO [muorb] [voxl_esc] Reply time : 715us
INFO [muorb] [voxl_esc] VOXL_ESC:
INFO [muorb] [voxl_esc] ESC ID : 1
INFO [muorb] [voxl_esc] Board Type : 40: ModalAi 4-in-1 ESC (M0129-3)
INFO [muorb] [voxl_esc] Unique ID : 0x2039333557555311000E0018
INFO [muorb] [voxl_esc] Firmware : version 39, hash 9c6233d6
INFO [muorb] [voxl_esc] Bootloader : version 184, hash 10bf24c8
INFO [muorb] [voxl_esc] Reply time : 705us
INFO [muorb] [voxl_esc] VOXL_ESC:
INFO [muorb] [voxl_esc] ESC ID : 2
INFO [muorb] [voxl_esc] Board Type : 40: ModalAi 4-in-1 ESC (M0129-3)
INFO [muorb] [voxl_esc] Unique ID : 0x2039333557555311000E001F
INFO [muorb] [voxl_esc] Firmware : version 39, hash 9c6233d6
INFO [muorb] [voxl_esc] Bootloader : version 184, hash 10bf24c8
INFO [muorb] [voxl_esc] Reply time : 105us
INFO [muorb] [voxl_esc] VOXL_ESC:
INFO [muorb] [voxl_esc] ESC ID : 3
INFO [muorb] [voxl_esc] Board Type : 40: ModalAi 4-in-1 ESC (M0129-3)
INFO [muorb] [voxl_esc] Unique ID : 0x2039333557555311000E0020
INFO [muorb] [voxl_esc] Firmware : version 39, hash 9c6233d6
INFO [muorb] [voxl_esc] Bootloader : version 184, hash 10bf24c8
INFO [muorb] [voxl_esc] Reply time : 723us
INFO [muorb] [voxl_esc] VOXL_ESC:
INFO [muorb] [voxl_esc] Use extened rpm packet : 1
INFO [muorb] [voxl_esc] All ESCs successfully detected
Starting GHST RC driver
INFO [qshell] Send cmd: 'ghst_rc start -d 7'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: ghst_rc start -d 7
INFO [muorb] [qshell] arg0 = 'ghst_rc'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] arg2 = '-d'
INFO [muorb] [qshell] arg3 = '7'
INFO [muorb] [qshell] Ok executing command: ghst_rc start -d 7
INFO [uORB] Advertising remote topic input_rc
INFO [qshell] qshell return value timestamp: 400026444, local time: 400029741
INFO [uORB] Advertising remote topic actuator_outputs_debug
INFO [uORB] Advertising remote topic esc_status
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: sensors start
INFO [muorb] [qshell] arg0 = 'sensors'
INFO [muorb] [qshell] arg1 = 'start'
INFO [qshell] Send cmd: 'sensors start'
INFO [uORB] Advertising remote topic sensor_selection
INFO [uORB] Advertising remote topic sensors_status_imu
INFO [uORB] Advertising remote topic vehicle_acceleration
INFO [uORB] Advertising remote topic vehicle_angular_velocity
INFO [uORB] Advertising remote topic sensor_combined
INFO [uORB] Advertising remote topic vehicle_air_data
INFO [uORB] Advertising remote topic vehicle_gps_position
INFO [uORB] Advertising remote topic vehicle_magnetometer
INFO [uORB] Advertising remote topic sensor_preflight_mag
INFO [uORB] Advertising remote topic sensors_status_mag
INFO [uORB] Advertising remote topic vehicle_imu
INFO [uORB] Advertising remote topic vehicle_imu_status
INFO [muorb] [qshell] Ok executing command: sensors start
INFO [qshell] qshell return value timestamp: 400201636, local time: 400204844
INFO [uORB] Advertising remote topic battery_status
INFO [uORB] Advertising remote topic sensors_status_baro
INFO [qshell] Send cmd: 'ekf2 start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: ekf2 start
INFO [muorb] [qshell] arg0 = 'ekf2'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic vehicle_attitude
INFO [uORB] Advertising remote topic vehicle_local_position
INFO [uORB] Advertising remote topic estimator_event_flags
INFO [uORB] Advertising remote topic estimator_innovation_test_ratios
INFO [uORB] Advertising remote topic estimator_innovation_variances
INFO [uORB] Advertising remote topic estimator_innovations
INFO [uORB] Advertising remote topic estimator_sensor_bias
INFO [uORB] Advertising remote topic estimator_states
INFO [uORB] Advertising remote topic estimator_status_flags
INFO [uORB] Advertising remote topic estimator_status
INFO [muorb] [qshell] Ok executing command: ekf2 start
INFO [uORB] Advertising remote topic ekf2_timestamps
INFO [qshell] qshell return value timestamp: 400372199, local time: 400374149
INFO [uORB] Advertising remote topic vehicle_odometry
INFO [uORB] Advertising remote topic estimator_aid_src_baro_hgt
INFO [uORB] Advertising remote topic estimator_aid_src_fake_pos
INFO [uORB] Advertising remote topic estimator_aid_src_fake_hgt
INFO [uORB] Advertising remote topic estimator_aid_src_mag_heading
INFO [uORB] Advertising remote topic estimator_aid_src_mag
INFO [uORB] Advertising remote topic estimator_aid_src_gravity
INFO [qshell] Send cmd: 'mc_pos_control start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: mc_pos_control start
INFO [muorb] [qshell] arg0 = 'mc_pos_control'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic takeoff_status
INFO [muorb] [qshell] Ok executing command: mc_pos_control start
INFO [qshell] qshell return value timestamp: 400439639, local time: 400441121
INFO [qshell] Send cmd: 'mc_att_control start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: mc_att_control start
INFO [muorb] [qshell] arg0 = 'mc_att_control'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] Ok executing command: mc_att_control start
INFO [qshell] qshell return value timestamp: 400483669, local time: 400486499
INFO [qshell] Send cmd: 'mc_rate_control start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: mc_rate_control start
INFO [muorb] [qshell] arg0 = 'mc_rate_control'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic rate_ctrl_status
INFO [muorb] [qshell] Ok executing command: mc_rate_control start
INFO [qshell] qshell return value timestamp: 400555835, local time: 400557571
INFO [qshell] Send cmd: 'mc_hover_thrust_estimator start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: mc_hover_thrust_estimator start
INFO [muorb] [qshell] arg0 = 'mc_hover_thrust_estimator'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] Ok executing command: mc_hover_thrust_estimator start
INFO [qshell] qshell return value timestamp: 400607194, local time: 400608430
INFO [qshell] Send cmd: 'mc_autotune_attitude_control start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: mc_autotune_attitude_control start
INFO [muorb] [qshell] arg0 = 'mc_autotune_attitude_control'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic autotune_attitude_control_status
INFO [muorb] [qshell] Ok executing command: mc_autotune_attitude_control start
INFO [qshell] qshell return value timestamp: 400652695, local time: 400654662
INFO [qshell] Send cmd: 'land_detector start multicopter'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: land_detector start multicopter
INFO [muorb] [qshell] arg0 = 'land_detector'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] arg2 = 'multicopter'
INFO [muorb] [qshell] Ok executing command: land_detector start multicopter
INFO [uORB] Advertising remote topic vehicle_land_detected
INFO [qshell] qshell return value timestamp: 400691706, local time: 400693863
INFO [qshell] Send cmd: 'manual_control start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: manual_control start
INFO [muorb] [qshell] arg0 = 'manual_control'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] Ok executing command: manual_control start
INFO [qshell] qshell return value timestamp: 400729166, local time: 400730650
INFO [uORB] Advertising remote topic manual_control_setpoint
INFO [qshell] Send cmd: 'control_allocator start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: control_allocator start
INFO [muorb] [qshell] arg0 = 'control_allocator'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic control_allocator_status
INFO [uORB] Marking DeviceNode(control_allocator_status) as advertised in process_remote_topic
INFO [uORB] Advertising remote topic actuator_motors
INFO [uORB] Advertising remote topic actuator_servos
INFO [uORB] Advertising remote topic actuator_servos_trim
INFO [muorb] [qshell] Ok executing command: control_allocator start
INFO [qshell] qshell return value timestamp: 400901362, local time: 400903812
INFO [qshell] Send cmd: 'load_mon start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: load_mon start
INFO [muorb] [qshell] arg0 = 'load_mon'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [qshell] Ok executing command: load_mon start
INFO [uORB] Advertising remote topic cpuload
INFO [qshell] qshell return value timestamp: 400944602, local time: 400945574
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: rc_update start
INFO [muorb] [qshell] arg0 = 'rc_update'
INFO [muorb] [qshell] arg1 = 'start'
INFO [qshell] Send cmd: 'rc_update start'
INFO [muorb] [qshell] Ok executing command: rc_update start
INFO [qshell] qshell return value timestamp: 401113628, local time: 401115288
INFO [uORB] Advertising remote topic rc_channels
INFO [qshell] Send cmd: 'commander start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: commander start
INFO [muorb] [qshell] arg0 = 'commander'
INFO [muorb] [qshell] arg1 = 'start'
INFO [muorb] [tasks] Creating pthread commander
INFO [muorb] [tasks] Successfully created px4 task PX4_commander with tid 2097641
INFO [uORB] Advertising remote topic led_control
INFO [muorb] [commander] LED: open /dev/led0 failed (22)
INFO [uORB] Advertising remote topic tune_control
INFO [muorb] [qshell] Ok executing command: commander start
INFO [qshell] qshell return value timestamp: 401250309, local time: 401251149
INFO [uORB] Advertising remote topic event
INFO [uORB] Advertising remote topic health_report
INFO [uORB] Advertising remote topic failsafe_flags
INFO [uORB] Advertising remote topic actuator_armed
INFO [uORB] Advertising remote topic vehicle_control_mode
INFO [uORB] Advertising remote topic vehicle_status
INFO [uORB] Advertising remote topic failure_detector_status
INFO [uORB] Advertising remote topic vehicle_thrust_setpoint
INFO [uORB] Advertising remote topic vehicle_torque_setpoint
INFO [uORB] Advertising remote topic vehicle_attitude_setpoint
INFO [uORB] Advertising remote topic vehicle_rates_setpoint
INFO [qshell] Send cmd: 'flight_mode_manager start'
INFO [muorb] [uORB] Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] [qshell] qshell gotten: flight_mode_manager start
INFO [muorb] [qshell] arg0 = 'flight_mode_manager'
INFO [muorb] [qshell] arg1 = 'start'
INFO [uORB] Advertising remote topic vehicle_command
INFO [muorb] [qshell] Ok executing command: flight_mode_manager start
INFO [qshell] qshell return value timestamp: 401328584, local time: 401330285
INFO [dataman] data manager file '/data/px4/dataman' size is 7866640 bytes
INFO [muorb] [uORB] Advertising remote topic transponder_report
INFO [muorb] [uORB] Advertising remote topic rtl_time_estimate
INFO [muorb] [uORB] Advertising remote topic position_setpoint_triplet
INFO [mavlink] mode: Onboard, data rate: 100000 B/s on udp port 14556 remote port 14557
INFO [muorb] [uORB] Advertising remote topic telemetry_status
INFO [mavlink] partner IP: 127.0.0.1
INFO [muorb] [uORB] Advertising remote topic vehicle_visual_odometry
INFO [muorb] [uORB] Advertising remote topic offboard_control_mode
INFO [muorb] [uORB] Advertising remote topic obstacle_distance
INFO [muorb] [uORB] Advertising remote topic distance_sensor
INFO [muorb] [uORB] Advertising remote topic timesync_status
INFO [uORB] Advertising remote topic estimator_aid_src_rng_hgt
INFO [muorb] [uORB] Marking DeviceNode(vehicle_command_ack) as advertised in process_remote_topic
INFO [uORB] Advertising remote topic actuator_controls_status_0
INFO [mavlink] mode: Normal, data rate: 100000 B/s on udp port 14558 remote port 14559
INFO [muorb] [uORB] Marking DeviceNode(telemetry_status) as advertised in process_remote_topic
INFO [mavlink] MAVLink only on localhost (set param MAV_{i}_BROADCAST = 1 to enable network)
INFO [px4] Startup script returned successfully
INFO [logger] logger started (mode=all)
INFO [muorb] [gps] GPS UART baudrate set to 9600
INFO [muorb] [ekf2] resetQuatStateYaw called: -0.081279 (0.000000)ERROR [muorb] [ekf2] ====> GLOBAL R to Earth: -4.657814 (42)
INFO [uORB] Advertising remote topic estimator_aid_src_ev_hgt
INFO [uORB] Advertising remote topic estimator_aid_src_ev_pos
INFO [uORB] Advertising remote topic estimator_aid_src_ev_vel
INFO [uORB] Advertising remote topic estimator_aid_src_ev_yaw
INFO [muorb] [ekf2] resetQuatStateYaw called: -0.081279 (0.100000)INFO [uORB] Advertising remote topic estimator_baro_bias
INFO [uORB] Advertising remote topic home_position
INFO [muorb] [gps] GPS UART baudrate set to 38400
INFO [muorb] [gps] GPS UART baudrate set to 57600
INFO [muorb] [gps] GPS UART baudrate set to 230400
INFO [muorb] [gps] GPS UART baudrate set to 460800
INFO [muorb] [gps] GPS UART baudrate set to 921600
INFO [muorb] [gps] GPS UART baudrate set to 115200
INFO [muorb] [gps] GPS UART baudrate set to 9600
INFO [muorb] [gps] GPS UART baudrate set to 38400
INFO [muorb] [gps] GPS UART baudrate set to 57600
INFO [muorb] [gps] GPS UART baudrate set to 230400
INFO [muorb] [gps] GPS UART baudrate set to 460800
INFO [muorb] [gps] GPS UART baudrate set to 921600
INFO [muorb] [gps] GPS UART baudrate set to 115200
INFO [muorb] [gps] GPS UART baudrate set to 9600
^CERROR [muorb] Sending kill command to SLPI!!!
Sending kill slpi command!
INFO [uORB] Advertising remote topic mavlink_log
ERROR [muorb] [sensors] Accel #0 fail: TIMEOUT!PX4 Exiting in sig_int_handler
Exiting in shutdown_main
starling2-max (D0012):/$**