@Alex-Kushleyev Hello! thank you for the response and suggestions. We got it working but I have a number of followup questions based on our experiences. They are at the end of this post.
-
The motor did not burn out as well. It was fine. I think we forgot to check if it was hot with all the other stuff going on.
-
Thank you for the link, the information is helping us understand better. Is there
-
Good news is we tried testing again with the same setup and there were no issues. We tried an alternate motor and prop as well (parts listed below). So maybe we had a short, bad soldering, or something? It was fine during the 10% power spin test which we rand for about 15-20 seconds before doing the calibration command
We used both:
- this motor with this prop
- and this motor with a 10 inch 2 blade APC prop (I can't find the link for it right now).
I put both the calibration output html files in the same folder as the previous files.
With the 10inch prop the current went over 40amps at 100% power.
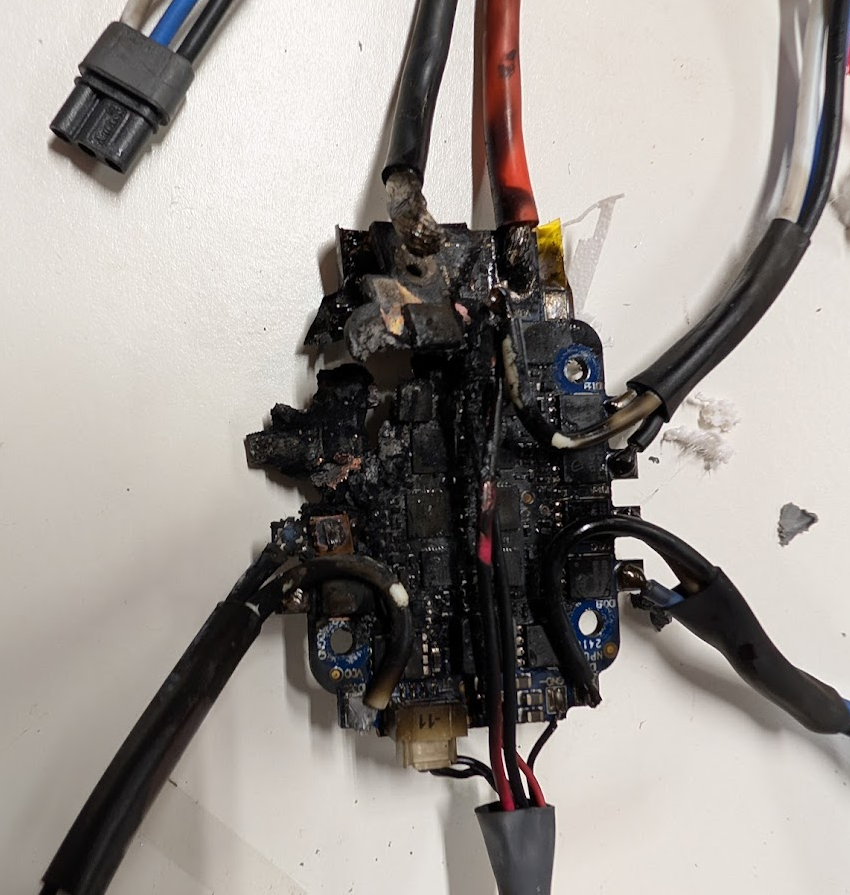
We put the quads together to fly and found that with the first setup 1100kv motor and 8046 was warbling even on arming at the lowest rpm. We did a couple short 5-10 second flights. The px4 logs from the FCv2 showed showed the rpm's were really oscillating and the temperature was ramping up to 90C in about 5-10 seconds.
We put the ki and kp values to 0 and the warbling and temp issue went way.
My followup questions are:
-
Can you take a peak at the calibraiton html files I put in the folder? Anything wrong stand out to you in those -- I'm just starting to understand how to look at these and it seems fine, except for maybe the amp spikes with each step. Also should we be looking for a bigger ESC if we are getting to 40 amps or over 40 amps? we dont expect to be flying full out all the time.
-
In the low_kc_motor_tuning document you shared there is section on ki/kp. It says: "leave kp and ki at zero or set to mild gains of kp=50 and ki=10 to avoid oscillations". 1. is there any more documentation on these parameters? 2. By setting them to zero are we loosing the gains of having this closed loop esc? 3. Is there an automated way to find an optimal ki/kp or is it just a manual process of setting, testing, looking at data?
-
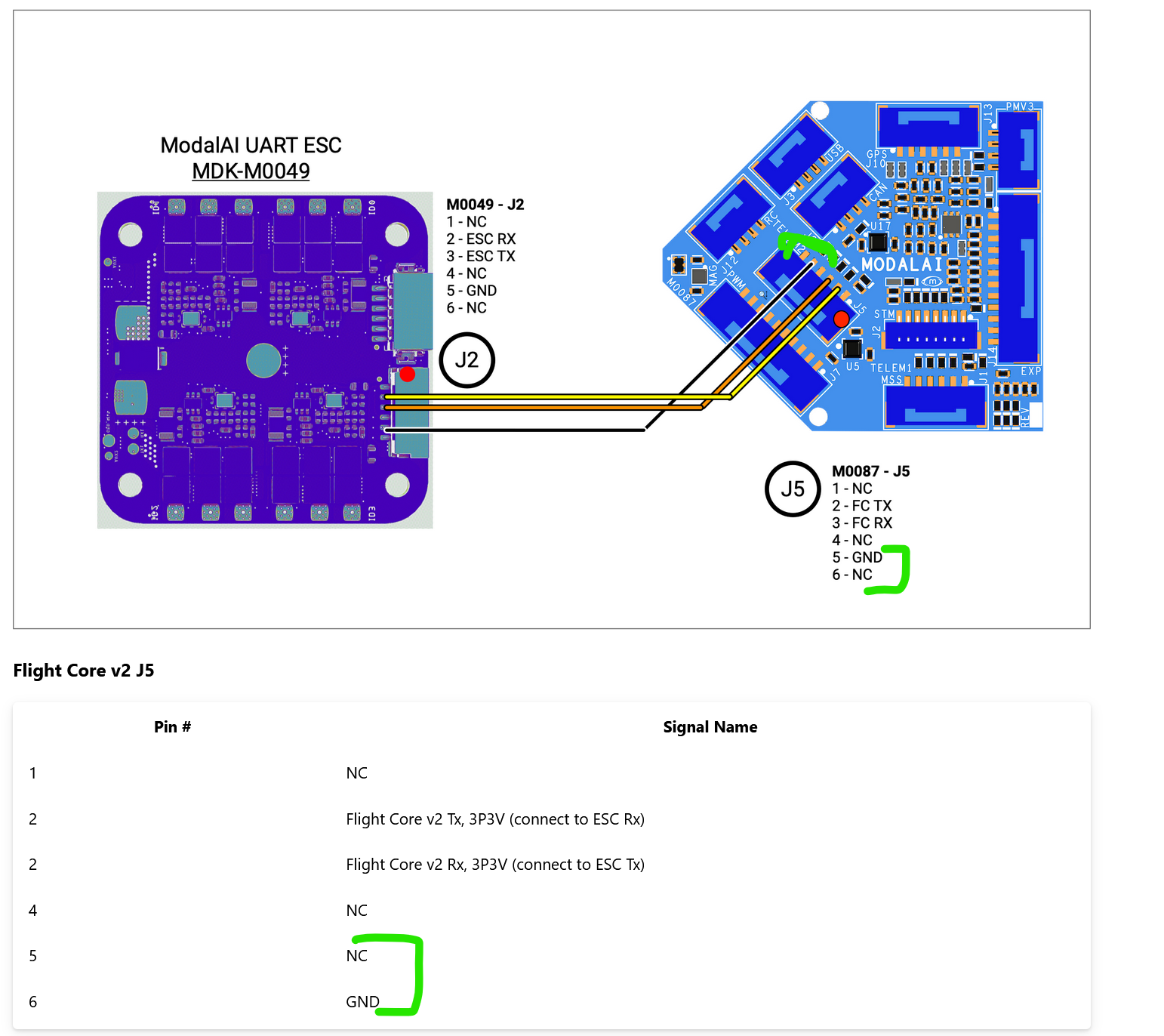
I will look at the px4 code but maybe you have a quick answer. In QGroundControl, does setting the max rpm and min rpm override the parameters programed into the ESC? For example if I have two quads with slightly different configurations an I saw the FCv2 that was set for one with a max of 18k rpm to the ESC set with 14k rpm max, what will happen.
Thank you! We really appreciate the followup!
Martin.