@ApoorvThapliyal : the problem (Error message: "set_position_target_local_ned: coordinate frame 0 unsupported") appeared in QGC after updating VOXL SDK from 1.5.0 to 1.6.3.
The error blocked me from being able to use QGC to calibrate or arm the drone. Stopping and restarting voxl-vision-hub solved the problem.
For now I'm using voxl-vision-hub as it comes on SDK 1.6.3 (no changes yet) and have not made changes to the .conf file (yet).
Hector Gutierrez
@Hector Gutierrez
Posts
-
"set_position_target_local_ned: coordinate frame 0 unsupported" error in QGroundControl -
"set_position_target_local_ned: coordinate frame 0 unsupported" error in QGroundControl@Eric-Katzfey : I'm not running any custom software other than voxl-vision-hub.
If I stop and disable voxl-vision-hub, the "set_position_target_local_ned: coordinate frame 0 unsupported" error goes away !
With this I am able to complete calibration (compass and IMU) successfully in GQC, BUT drone fails to arm in Position mode even though QGC shows "Ready to Fly" and all Sensor status show as "normal".
Checking VIO in VOXL Portal shows correct operation of VIO: VIO plot follows drone motion, which seems to indicate that VIO is working fine, but
QGC shows "Yaw estimate error" , and "--" as altitude estimate, which prevent the drone from arming in Position mode.
Then I re-enable and restart voxl-vision-hub.
Now GQC receives altitude estimates and I'm able to arm the drone in position mode !
So the trick seems to be to disable/stop voxl-vision-hub, calibrate IMU if needed, and enable/restart voxl-vision-hub, to be able to arm in Position mode.
Seems odd but I'll take it ! Let me know if you have any comments or suggestions. Thanks. -
"set_position_target_local_ned: coordinate frame 0 unsupported" error in QGroundControlHello -
After upgrading SDK from 1.5.0 to 1.6.3, I am unable to calibrate the Starling 2 in QGroundControl (Version 4.4.4)
Error message: "set_position_target_local_ned: coordinate frame 0 unsupported"
It seems the Starling 2 is sending a Mavlink message that is trying to set the coordinate frame to 0 (MAV_FRAME_GLOBAL), which cannot be processed by the local NED setpoint command.
Any suggestions on how to correct this error would be appreciated.
Thanks -
ELRS BetaFPV receiver bricked when updating SDK on Starling 2@Ben-Linne : Thanks for the excellent instructions. Worked perfectly first shot. betaFPV is back to normal and binds to the radio controller ! Best regards, Hector
-
ELRS BetaFPV receiver bricked when updating SDK on Starling 2@Ben-Linne : The blue LED is stuck on solid blue as soon as you provide power. The receiver seems stuck on bootloader mode. I've followed several methods available to re-flash the receiver, but communication is not possible. It seems the receiver is dead.
Question: is this behavior expected (betaFPV receiver unable to communicate) when upgrading the SDK to 1.6.0 or 1.6.3 ? Is this receiver still supported by the new versions of the SDK ? Let me know - Thanks. -
ELRS BetaFPV receiver bricked when updating SDK on Starling 2Hello,
I recently updated my Starling 2 from SDK 1.5.0 to 1.6.3. At the end I got the following error message:
FAILED TO EXECUTE the following steps: voxl-elrs configure.
My receiver is the BetaFPV ELRS 900 v1.1 II, 915 MHz.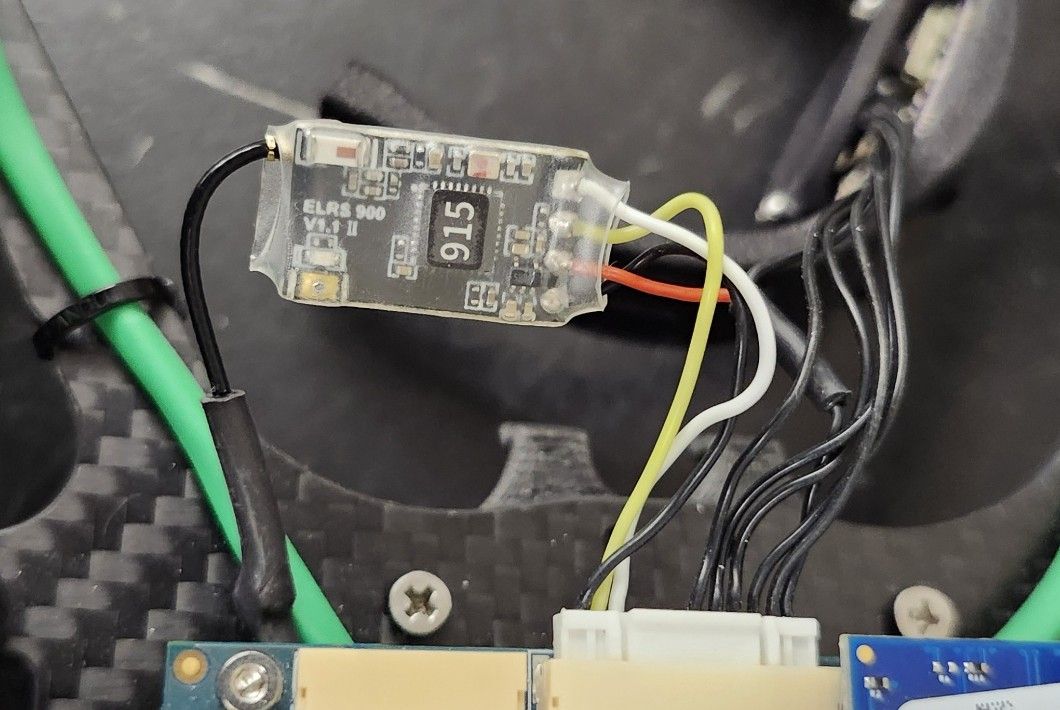 I connected the ELRS receiver to a FTDI USB interface and tried to configure it by the following ways:
I connected the ELRS receiver to a FTDI USB interface and tried to configure it by the following ways:- using ExpressLRS configurator tool
- using ModalAI ExpressLRS configuration tool
- Power off the drone completely
. Hold down the receiver's boot button, Power on the drone while holding the button
. Keep holding for 1 second after power on, then release
. Run the following command:
python3 -m esptool --port /dev/slpi-uart-7 --chip ESP8266
--baud 115200 --before no_reset --after soft_reset
write_flash 0x00 /usr/share/modalai/voxl-elrs/firmware/3.5.3.21/BETAFPV_900_RX_via_UART/BETAFPV_900_RX-3.5.3.21-20251205.bin
None of these options worked. It is not possible to connect to the receiver - it seems dead.
QUESTIONS: - is the BetaFPV ELRS 900 v1.1 II, 915 MHz, no longer supported in the latest versions of the VOXL SDK ??
- If the answer is yes, which is the latest version of the SDK that I can use without bricking my receiver ?
- I tried to purchase a new receiver chip from the ModalAI store, but is not available. Where could I get one ?
Please let me know at your earliest convenience. Thanks.
-
Starling 2: TOF sensor not recognized by VOXL Portal@Alex-Kushleyev - thanks, I submitted the RMA request, will let you know after I have the chance to replace and test the replacement parts.
Thanks, Hector -
Starling 2 Max Crashes in Position Hold Mode After Disabling Magnetometer for Indoor Flight@berayksl : If your problem is with the height estimate and your VIO is working well and gives you good estimates of altitude, try disabling the barometer as well: SYS_HAS_BARO = disable, SYS_HAS_GPS = disable.
-
Starling 2 Max Crashes in Position Hold Mode After Disabling Magnetometer for Indoor Flight@berayksl - we have an indoor lab . There is a large steel table on one side of the room that affects the magnetometer. The drone has to stay away from that object to be able to arm. Large ferromagnetic objects definitely affect the magnetometer. Can you arm and fly position mode in a regular room with magnetometer enabled and GPS disabled ?
-
Starling 2 Max Crashes in Position Hold Mode After Disabling Magnetometer for Indoor Flight@berayksl : IN my case the problem has not appeared again (fingers crossed !) since I deactivated GPS from the EKF2.
From what you described above, it seems you also deactivated the magnetometer (SYS_HAS_MAG = 0), have you tried to enable that ?
Lack of magnetometer may lead to unstable EKF2 sensor fusion ? -
Starling 2: TOF sensor not recognized by VOXL Portal@Alex-Kushleyev : here is the output:
[ 206.798954] RTW: wlan0- hw port(0) mac_addr =00:c0:ca:b3:a6:e5 [ 206.801089] qcom_rpmh DRV:apps_rsc TCS Busy, retrying RPMH message send: addr=0x40d00 [ 206.801105] qcom_rpmh DRV:apps_rsc TCS Busy, retrying RPMH message send: addr=0x40d00 [ 215.356522] CAM_INFO: CAM-CRM: cam_req_mgr_process_flush_req: 2177 Last request id to flush is 5890 [ 215.356586] CAM_INFO: CAM-ISP: __cam_isp_ctx_flush_req_in_top_state: 3046 Last request id to flush is 5890 [ 215.356694] CAM_INFO: CAM-ISP: __cam_isp_ctx_flush_req_in_top_state: 3069 Stop HW complete. Reset HW next. [ 215.367444] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 1117 CAM_STOP_DEV Success, sensor_id:0x356,sensor_slave_addr:0x30 [ 215.367450] CAM_INFO: CAM-CSIPHY: cam_csiphy_core_cfg: 982 STOP_DEV: CSIPHY_IDX: 0, Device_slot: 0, Datarate: 592000000, Settletime: 2800000000 [ 215.367473] CAM_INFO: CAM-ISP: cam_ife_mgr_release_hw: 4755 Release HW success ctx id: 2 [ 215.368902] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Dropping the link to regulator.79 [ 215.372057] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Dropping the link to regulator.60 [ 215.372072] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Dropping the link to regulator.56 [ 215.372085] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Dropping the link to regulator.58 [ 215.372128] CAM_INFO: CAM: cam_res_mgr_shared_pinctrl_put: 270 Need hold put this pinctrl [ 215.372143] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 1047 CAM_RELEASE_DEV Success, sensor_id:0x356,sensor_slave_addr:0x30 [ 216.395442] msm_vidc: err : 00000002: h264e: msm_comm_flush: Already in flush [ 216.508604] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 1117 CAM_STOP_DEV Success, sensor_id:0x577,sensor_slave_addr:0x34 [ 216.508616] CAM_INFO: CAM-CSIPHY: cam_csiphy_core_cfg: 982 STOP_DEV: CSIPHY_IDX: 1, Device_slot: 0, Datarate: 1500000000, Settletime: 2200000000 [ 216.515038] CAM_INFO: CAM-ISP: cam_ife_mgr_release_hw: 4755 Release HW success ctx id: 0 [ 216.515922] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor1: Dropping the link to regulator.79 [ 216.517960] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor1: Dropping the link to regulator.56 [ 216.517973] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor1: Dropping the link to regulator.60 [ 216.517986] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor1: Dropping the link to regulator.58 [ 216.518049] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 1047 CAM_RELEASE_DEV Success, sensor_id:0x577,sensor_slave_addr:0x34 [ 216.618202] CAM_INFO: CAM-CRM: cam_req_mgr_process_flush_req: 2177 Last request id to flush is 5927 [ 216.618268] CAM_INFO: CAM-ISP: __cam_isp_ctx_flush_req_in_top_state: 3046 Last request id to flush is 5927 [ 216.618374] CAM_INFO: CAM-ISP: __cam_isp_ctx_flush_req_in_top_state: 3069 Stop HW complete. Reset HW next. [ 216.621881] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 1117 CAM_STOP_DEV Success, sensor_id:0x356,sensor_slave_addr:0x30 [ 216.621891] CAM_INFO: CAM-CSIPHY: cam_csiphy_core_cfg: 982 STOP_DEV: CSIPHY_IDX: 2, Device_slot: 0, Datarate: 592000000, Settletime: 2800000000 [ 216.628363] CAM_INFO: CAM-ISP: cam_ife_mgr_release_hw: 4755 Release HW success ctx id: 3 [ 216.629040] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Dropping the link to regulator.79 [ 216.633125] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Dropping the link to regulator.60 [ 216.633166] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Dropping the link to regulator.56 [ 216.633212] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Dropping the link to regulator.59 [ 216.633667] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 1047 CAM_RELEASE_DEV Success, sensor_id:0x356,sensor_slave_addr:0x30 [ 216.687846] CAM_INFO: CAM-CRM: cam_req_mgr_process_flush_req: 2177 Last request id to flush is 5930 [ 216.687904] CAM_INFO: CAM-ISP: __cam_isp_ctx_flush_req_in_top_state: 3046 Last request id to flush is 5930 [ 216.687998] CAM_INFO: CAM-ISP: __cam_isp_ctx_flush_req_in_top_state: 3069 Stop HW complete. Reset HW next. [ 216.692371] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 1117 CAM_STOP_DEV Success, sensor_id:0x356,sensor_slave_addr:0x30 [ 216.692383] CAM_INFO: CAM-CSIPHY: cam_csiphy_core_cfg: 982 STOP_DEV: CSIPHY_IDX: 0, Device_slot: 1, Datarate: 592000000, Settletime: 2800000000 [ 216.698841] CAM_INFO: CAM-ISP: cam_ife_mgr_release_hw: 4755 Release HW success ctx id: 1 [ 216.699769] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor6: Dropping the link to regulator.79 [ 216.703840] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor6: Dropping the link to regulator.60 [ 216.703886] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor6: Dropping the link to regulator.56 [ 216.703919] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor6: Dropping the link to regulator.58 [ 216.705006] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 1047 CAM_RELEASE_DEV Success, sensor_id:0x356,sensor_slave_addr:0x30 [ 216.712597] qcom_rpmh DRV:apps_rsc TCS Busy, retrying RPMH message send: addr=0x30080 [ 216.721134] CAM_WARN: CAM-CRM: cam_req_mgr_close: 160 release invoked associated userspace process has died [ 216.761711] msm_vidc: high: 00000002: h264e: Closed video instance: ffffffeefdebe000 [ 216.761933] msm_vidc: high: 00000001: h264e: Closed video instance: ffffffef0e100000 [ 216.884653] CAM_ERR: CAM-MEM: cam_mem_mgr_create_debug_fs: 126 failed to create dentry [ 216.895769] CAM_INFO: CAM-HFI: cam_hfi_init: 878 Init IO1 : [0x10c00000 0xcf300000] IO2 [0xe0200000 0x1ed00000] [ 216.906058] CAM_INFO: CAM-ICP: cam_icp_mgr_hw_open: 3879 FW download done successfully [ 216.906072] CAM_INFO: CAM-ICP: cam_icp_mgr_process_dbg_buf: 2572 FW_DBG:CICP_FW_E : HFI :QC_IMAGE_VERSION_STRING=CICP.FW.1.0-00079,OEM_IMAGE_VERSION_STRING=CRM,BUILD_TIME: Oct 17 2019 05:49:19,CACHE_ENABLED at icphostinterface.c:636 QC_IMAGE_VERSION_STRING=CICP.FW.1.0-00079 OEM_IMAGE_VERSION_STRING=CRM [ 216.906084] CAM_INFO: CAM-ICP: cam_icp_mgr_process_dbg_buf: 2572 FW_DBG:CICP_FW_E : HFI :ELF variant: CACHE-ENABLED:T480:API_V2:USE_CDM_1_1: , API version: 0x2000049 at icphostinterface.c:637 QC_IMAGE_VERSION_STRING=CICP.FW.1.0-00079 OEM_IMAGE_VERSION_STRING=CRM [ 216.929300] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Linked as a consumer to regulator.58 [ 216.931458] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Linked as a consumer to regulator.56 [ 216.933569] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Linked as a consumer to regulator.60 [ 216.933607] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Linked as a consumer to regulator.79 [ 216.956534] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 918 Probe success,slot:0,slave_addr:0x30,sensor_id:0x356 [ 216.956636] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Dropping the link to regulator.79 [ 216.960823] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Dropping the link to regulator.60 [ 216.960951] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Dropping the link to regulator.56 [ 216.961062] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Dropping the link to regulator.58 [ 216.986327] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor1: Linked as a consumer to regulator.58 [ 216.986474] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor1: Linked as a consumer to regulator.60 [ 216.986534] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor1: Linked as a consumer to regulator.56 [ 216.986670] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor1: Linked as a consumer to regulator.79 [ 217.000967] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 918 Probe success,slot:1,slave_addr:0x34,sensor_id:0x577 [ 217.001068] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor1: Dropping the link to regulator.79 [ 217.003181] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor1: Dropping the link to regulator.56 [ 217.003308] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor1: Dropping the link to regulator.60 [ 217.003456] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor1: Dropping the link to regulator.58 [ 217.029376] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Linked as a consumer to regulator.59 [ 217.031600] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Linked as a consumer to regulator.56 [ 217.033826] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Linked as a consumer to regulator.60 [ 217.033928] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Linked as a consumer to regulator.79 [ 217.057861] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 918 Probe success,slot:2,slave_addr:0x30,sensor_id:0x356 [ 217.058009] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Dropping the link to regulator.79 [ 217.062570] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Dropping the link to regulator.60 [ 217.062700] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Dropping the link to regulator.56 [ 217.062812] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Dropping the link to regulator.59 [ 217.085707] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Linked as a consumer to regulator.60 [ 217.087825] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Linked as a consumer to regulator.59 [ 217.089993] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Linked as a consumer to regulator.55 [ 217.092187] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Linked as a consumer to regulator.79 [ 217.695551] RTW: wlan0- hw port(0) mac_addr =00:c0:ca:b3:a6:e5 [ 218.274338] msm_vidc: err : ffffffff: .....: DBLP Set: status 0 [ 218.624174] CAM_ERR: CAM-CCI: cam_cci_read: 1320 wait_for_completion_timeout rc = -110 FIFO buf_lvl: 0x0 [ 220.128139] CAM_ERR: CAM-CCI: cam_cci_flush_queue: 53 wait timeout [ 220.128236] CAM_ERR: CAM-CCI: cam_cci_read_bytes: 1613 failed to read rc:-110 [ 220.128248] CAM_ERR: CAM-SENSOR: cam_cci_i2c_read: 35 rc = -110 [ 220.128262] CAM_WARN: CAM-SENSOR: cam_sensor_match_id: 707 read id: 0x0 expected id 0x2975: [ 220.130622] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Dropping the link to regulator.79 [ 220.132521] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Dropping the link to regulator.55 [ 220.132641] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Dropping the link to regulator.60 [ 220.132787] qcom,camera ac50000.qcom,cci:qcom,cam-sensor3: Dropping the link to regulator.59 [ 220.160433] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor6: Linked as a consumer to regulator.58 [ 220.163839] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor6: Linked as a consumer to regulator.56 [ 220.166217] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor6: Linked as a consumer to regulator.60 [ 220.166422] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor6: Linked as a consumer to regulator.79 [ 220.191299] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 918 Probe success,slot:6,slave_addr:0x30,sensor_id:0x356 [ 220.191460] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor6: Dropping the link to regulator.79 [ 220.195732] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor6: Dropping the link to regulator.60 [ 220.195860] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor6: Dropping the link to regulator.56 [ 220.195969] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor6: Dropping the link to regulator.58 [ 220.255634] CAM_WARN: CAM-CRM: cam_req_mgr_close: 160 release invoked associated userspace process has died [ 229.072542] RTW: wlan0- hw port(0) mac_addr =00:c0:ca:b3:a6:e5Let me know what else is needed. Thanks, Hector
-
Starling 2 Max Crashes in Position Hold Mode After Disabling Magnetometer for Indoor Flight@berayksl : I had similar behavior on a Starling2: after arming on position mode, sometimes it would fly fine, other times it would take off vertically at fast speed and only option to stop it would be the kill switch.
Have you tried to set the parameter SYS_HAS_GPS to "disable" in QGroundControl ? In my case it made a huge difference. If you are flying indoors (no GPS) but keep the GPS active on EKF2, it seems to deteriorate the sensor fusion, leading to inconsistent estimates of altitude that can lead to instability in the vertical axis. -
Starling 2: TOF sensor not recognized by VOXL Portal@Alex-Kushleyev : got the output of dmesg. It is too large to cut and paste here, but you can download the text file from this link:
https://quickconnect.to/asapstorage/d/s/144lSyeQPPdNEZhCoWVCOjXUTudhlakC/Yfk8uh0E8Vk96kuc_96XHvRM6svAJSIF-bLWAR1fcaQw
(dont click on the link: copy and paste to a browser window).
Or send me the syntax to get a filtered output as you have above. Thanks. -
Starling 2: TOF sensor not recognized by VOXL Portal@Alex-Kushleyev said in Starling 2: TOF sensor not recognized by VOXL Portal:
[ 1712.679736] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Dropping the link to regulator.60
Can you send me the syntax to get the dmesg output from voxl-camera-server -l ? I've tried a few options but I do not get an output that looks like the one you show. Thanks.
-
Starling 2 - failure when entering offboard mode in Starling 2@george-kollamkulam : the problem with the drone shooting straight up in position mode seems related to bad estimation of altitude. In particular, if you are flying indoors (no GPS signal accessible) GPS needs to be eliminated from the altitude estimation since the lack of GPS signal in the sensor fusion seems to cause the problem.
IN summary, if you are flying indoors and experience this problem, try disabling GPS in PX4 by setting the parameter SYS_HAS_GPS to "disable" in QGroundControl. That seems to have resolved the issue for us - at least for now. -
Starling 2 - failure when entering offboard mode in Starling 2Hello,
After fresh IMU and gyro calibration, and with successful check of VIO (via VOXL portal) Starling 2 is able to arm in position mode and fly in position mode rather well. However, as soon as switching to offboard mode (in this case to test follow_tag) flight becomes unstable: drone starts to very quick climbing straight up in the vertical direction.
It seems this kind of failure (drone starts climbing up fast straight in the vertical direction) seems a relatively common failure mode when going to offboard mode. Are there any suggestions of what can be causing this ? VIO has been tested multiple times and looks solid. Drone is able to arm in position mode.
Please let me know your suggestions. Thanks. -
Voxl Vision Hub - Follow tag maneuver does not operate as expectedHello - The Voxl-Vision-Hub - Follow tag maneuver does not operate as expected on Startling 2. Background information:
- voxl-vision-hub has been built and deployed on Startling 2
- VIO works well and IMU has been calibrated - Drone can arm and fly as expected on Position mode
- Figure-8 maneuver works well when switching to offboard mode
- To test follow tag maneuver in offboard mode, the following preparations were done:
- /etc/modalai/voxl-tag-detector.conf was edited to select detector_0: "input_pipe": "tracking_front_misp_norm"
- the path to the lens calibration file was updated to the correct path
- run voxl-tag-detector on voxl2 works properly: the overlay on voxl portal shows correct tag detection in tracking tag overlay
- /etc/modalai/voxl-vision-hub.conf was changed to: "offboard_mode": "follow_tag",
The tag to be used for the test "follow_tag_id": 0 corresponds to the 36h11 tag family. The tag is 15x15 cm.
After all of the above, Starling 2 is armed in position mode and maneuvered to a distance of approx. 2.5 m in front of the tag.
voxl-follow-tag is running on voxl2 terminal.
Offboard mode is enganged.
Instead of flying towards the tag, the drone yaws to the right and flies in a divergent trajectory away from the tag.
Flight behavior has been tested several times and is always the same.
Please advise on what can be wrong and what can be tested. Thanks.
-
Testing voxl-vision-hub offboard code without arming the drone@Eric-Katzfey - Brilliant idea- thank you.