@modaltb Yes, we used r14.1a_1.1.2-M0054-14.1a-FLAT-V3.zip as well.
We will make a try with removing all the hardware connection.
@modaltb Yes, we used r14.1a_1.1.2-M0054-14.1a-FLAT-V3.zip as well.
We will make a try with removing all the hardware connection.
@Eric-Katzfey We've tried replacing power cable with a spare. Tried fastboot and qdl again, but it doesn't work.
@Eric-Katzfey Thanks. We will try as soon as possible. Are there any more possible solutions that might solve this problem?
We need VOXL 2 to work urgently. Can we get any remote assist? Thanks.
@tom Yes, entering into fastboot mode is possible. We tried re-flashing with voxl2_platform_1.3.1-0.8/system-image/flash-system-image.sh. But after flashing, it doesn't go after but only waiting for ADB.
Done Flashing
[--------------------------------------------------------](100%)
rebooting...
finished. total time: 0.050s
[INFO] Waiting for ADB@tom Yes, it reached the point. The result is written on the previous replies.
@tom We've ran factory reset with qdl and this is the output.
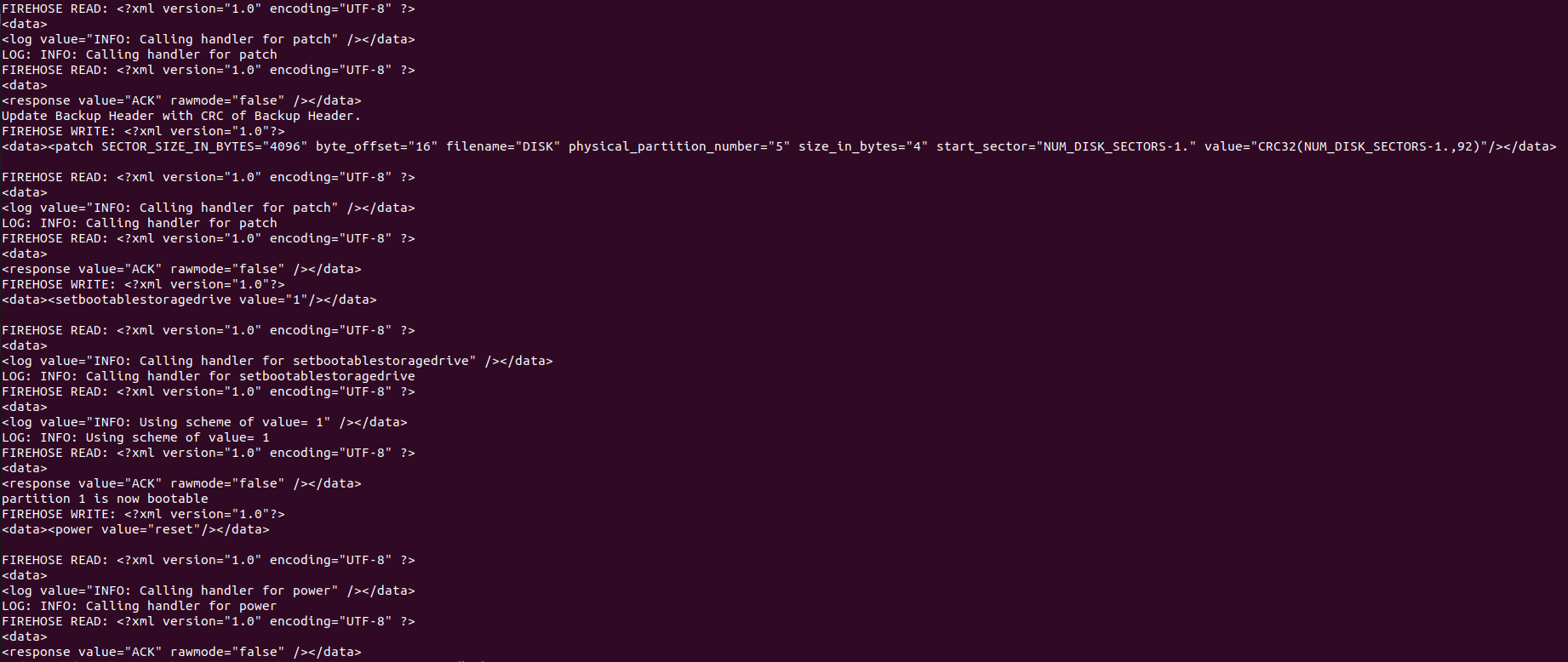
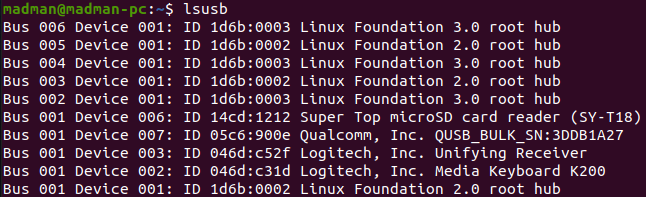
After performing qdl, if we run lsusb without turning off the power, it gives us this.

If we cycle power and run lsusb, it is still shown below. It is not recognized as 05c6:901d.

@Adrian-Hidalgo We disconnected ToF and reconnected with the original Hi-Res camera. Also, we've checked the camera connections, but had no issue about it. However, we've disconnected GPS module, as we don't need it. Can this be the reason?
@tom This is the full output of lsusb.
Hi, we have a problem with using Sentinel through ADB.
We bought Sentinel and we were able to connect with ADB. Also, other packages such as voxl-mapper worked fine. We needed more accurate map in indoor, so we disassembled VOXL Flight Deck and replaced Hi-Res camera with PMD ToF Sensor from VOXL CAM. However, from that point, connecting through ADB doesn’t work.
To resolve this problem we tried reflashing by fastboot.
1. Fastboot mode by pressing SW1 for 30 secs.
2. $ fastboot device
3. $ sudo ./install.sh -f
Flashing finished but doesn’t do anything but only printing “Waiting for ADB”. adb devices couldn’t detect any device.
What we have checked:
adb kill-serverHow can we connect through ADB? Thanks.
Additionaly, the Follow Path button doesn't shows up on the GUI of voxl-portal.
Hi @Matt-Turi,
output of apt list --installed | grep voxl is listed below.
voxl2:~$ apt list --installed | grep voxl
WARNING: apt does not have a stable CLI interface. Use with caution in scripts.
libvoxl-cutils/unknown,now 0.1.1 arm64 [installed,automatic]
mv-voxl/now 0.1-r0 arm64 [installed,local]
voxl-bind/unknown,now 0.0.1 arm64 [installed,automatic]
voxl-camera-calibration/unknown,now 0.2.2 arm64 [installed,automatic]
voxl-camera-server/unknown,now 1.1.0 arm64 [installed,automatic]
voxl-ceres-solver/unknown,now 1.14.0-7 arm64 [installed,automatic]
voxl-cpu-monitor/unknown,now 0.2.6 arm64 [installed,automatic]
voxl-docker-support/unknown,now 1.2.4 arm64 [installed,automatic]
voxl-jpeg-turbo/unknown,now 2.1.3-4 arm64 [installed,automatic]
voxl-libgphoto2/unknown,now 0.0.4 arm64 [installed,automatic]
voxl-libuvc/unknown,now 1.0.6 arm64 [installed,automatic]
voxl-logger/unknown,now 0.3.2 arm64 [installed,automatic]
voxl-mapper/unknown,now 0.0.7 arm64 [installed]
voxl-mavlink/unknown,now 0.1.0 arm64 [installed,automatic]
voxl-mavlink-server/unknown,now 0.1.3 arm64 [installed,automatic]
voxl-modem/unknown,now 0.16.0 arm64 [installed,automatic]
voxl-mongoose/unknown,now 7.6.0 arm64 [installed,automatic]
voxl-mpa-to-ros/unknown,now 0.3.3 arm64 [installed,automatic]
voxl-mpa-tools/unknown,now 0.7.2 arm64 [installed,automatic]
voxl-nlopt/unknown,now 2.5.0-4 arm64 [installed,automatic]
voxl-opencv/unknown,now 4.5.5-1 arm64 [installed,automatic]
voxl-portal/unknown,now 0.2.8 arm64 [installed]
voxl-px4/unknown,now 1.4.16 arm64 [installed,automatic]
voxl-px4-imu-server/unknown,now 0.1.2 arm64 [installed,automatic]
voxl-qvio-server/unknown,now 0.7.1 arm64 [installed,automatic]
voxl-streamer/unknown,now 0.3.6 arm64 [installed,automatic]
voxl-suite/unknown,now 0.8.1 arm64 [installed]
voxl-tag-detector/unknown,now 0.0.4 arm64 [installed,automatic]
voxl-tflite-server/unknown,now 0.2.7 arm64 [installed,automatic]
voxl-utils/unknown,now 1.1.4 arm64 [installed,automatic]
voxl-uvc-server/unknown,now 0.1.1 arm64 [installed,automatic]
voxl-vision-px4/unknown,now 1.2.0 arm64 [installed,automatic]
voxl-voxblox/unknown,now 1.0.4 arm64 [installed,automatic]
voxl2-system-image/now 1.3.1-r0 arm64 [installed,local]
voxl2-wlan/now 1.0-r0 arm64 [installed,local]
We don't see any error messages from voxl-mapper.
ERROR fetching tf from tf ringbuffer
there wasn't sufficient data in the buffer
This message shows up intermittently, but doesn't seems to effect in mapping function. Message below is the message after using Plan to a point feature.
Client requested slice level update
Client requested slice level update
Client requested slice level update
Client requested slice level update
Client requested plan to location
Using start pose of: x: -0.08, y: 0.04, z: 0.02
using goal pose of: x: -1.04, y: 3.00, z: 0.02
Map Bounds:
Lower-> x: -6.40, y: -3.20, z: -3.20
Upper-> x: 6.40, y: 6.40, z: 3.20
Switching to 3D checks
------------------------------------------
TIMING STATS
------------------------------------------
Solve time -> 1000.01ms
Total time -> 1000.04ms
Random node grab time -> Average: 0.00ms, TOT: 48.90ms
Nearest node time -> Average: 0.01ms, TOT: 508.83ms
Check motion time -> Average: 0.00ms, TOT: 354.81ms
Neighborhood grab time -> Average: 0.00ms, TOT: 6.05ms
Children update time -> Average: nanms, TOT: 0.00ms
------------------------------------------
GENERAL STATS
------------------------------------------
PATH LENGTH: 3.11
ATTEMPTS: 42415
QNEAREST FAILS: 59
RANDOM TO NEAREST FAILS: 39915
PARTIAL SEGMENTS ADDED: 2441
TREE REWIRES: 0
------------------------------------------
RRTSTAR FAILED: Exceeded max iterations. Outputting closest path
Simplifying Path took: 0.07ms
Removed 0 nodes
Collisions along base path-> no
No free constraints set in the vertices. Polynomial can not be optimized. Outputting fully constrained polynomial.
Loco Smooth took: 467.29ms
Success-> yes
However, we found this error in voxl-portal. Would it be the reason of this problem? If so, how can we solve it?
voxl2:/$ voxl-portal
exising instance of voxl-portal found, attempting to stop it
voxl-portal started up
Server providing: battery connected
Server providing: flight_info connected
Server providing: gps connected
Server providing: gps connected
Server providing: flight_info connected
Server providing: battery connected
Server not available
Failed to open pipe: /run/mpa/plan_msgs/
Server providing pose connected
Server providing: costmap connected
Server providing: mesh connected
Server providing: plan connected
Server providing: aligned ptcloud connected
Thanks.
Hi,
I am using Sentinel Drone with voxl-portal and voxl-mapper.
We've changed voxl-mapper.conf to work with stereo camera.
However, plan to a point is not working. When we give a point, it generates trajectory, but Sentinel doesn't move at all.
We've changed offboard to trajectory. Is there any solution to it?
Thanks.
@Arjun-Jain Thanks. Is it possible in real-time processing?
Hi,
I'm working on integrating other service based on voxblox map on voxl-mapper. Is there any ways to export map made from voxl-mapper like ROS advertising?
Thanks.