@tom Yes, the QDL is successful.
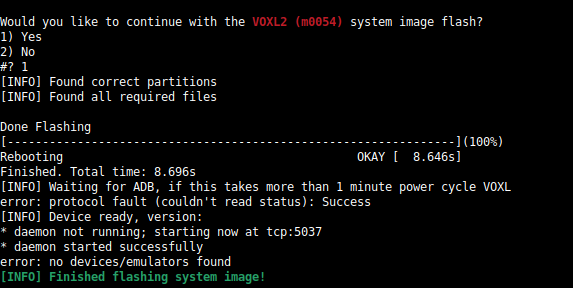
And installing the SDK is also successful but it just wait for adb interface to be up, which the usb is still in fastboot mode after power cycle.

@tom Yes, the QDL is successful.
And installing the SDK is also successful but it just wait for adb interface to be up, which the usb is still in fastboot mode after power cycle.
@tom What will be the likely cause for the drone not getting out of fastboot mode?
@tom Pls see the image below. The Google Inc.... (fastboot) is the drone usb.

@tom Hi Tom,
The OS is ubuntu 22.04 and not on virtual machine.
It seems like it cannot come out of fastboot mode and waiting for adb connection.
@tom Hi, I've completed the flashing of latest SDK release. But I'm not able to adb shell into the drone.
The condition remains the same even after I did a power cycle, adb kill-server and adb start-server. Pls help.
@tom After I've flashed the drone, I'm not able to adb.
The usb connection shows as fastboot (see image below) instead of
Bus 001 Device 022: ID 05c6:901d Qualcomm, Inc. KONA-QRD _SN:21217FEB

Can you advise how to fix this?
@CJ said in Unbrick Voxl2:
@wilkinsaf Yes, I've download from snap store. Thanks for your tips. I'll try to download using git clone.
The git clone version works but still unable to adb to the drone after successfully flashed.
@wilkinsaf Yes, I've download from snap store. Thanks for your tips. I'll try to download using git clone.
@tom I've tried with different usb cables. But the same error message appears.
Hi ModalAI team,
Any help?
Hi,
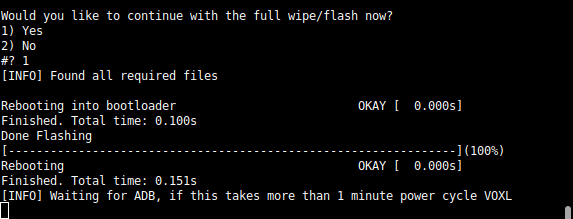
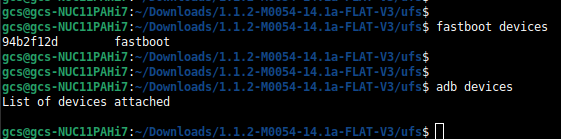
I'm unable to adb shell into the drone (Voxl2 Starling). So I've tried to flash the drone using fastboot. The flashing is successful but it cannot adb into the drone after restart the drone. The error is no devices/emulators found.
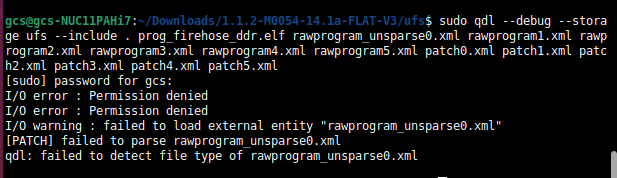
Then, I try the qdl method and the following error is shown. Pls advise how to unbrick the drone.
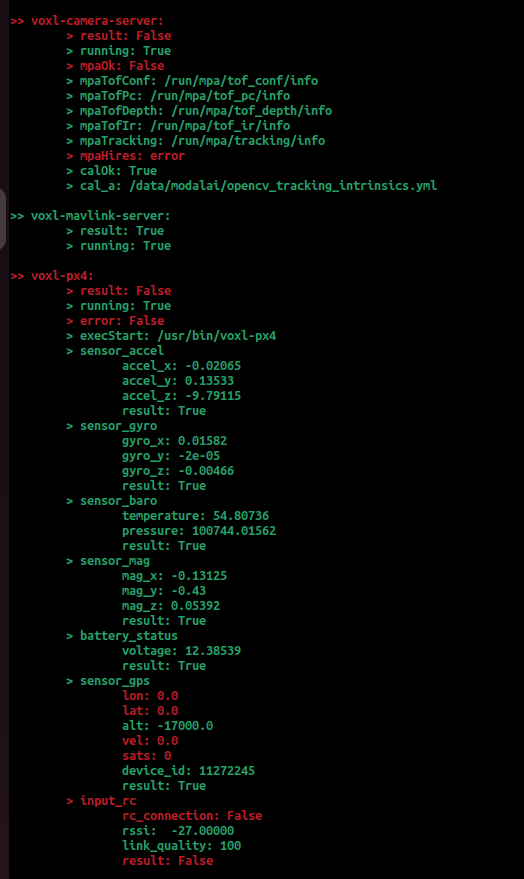
@Eric-Katzfey The RC is bind with the drone and it is able to control the drone. However, the check shows that there is no connection. Is the RC not bind correctly? Furthermore, when I perform takeoff and landing using the mavsdk program, there is an error on Visual Failure. Is the error in voxl-camera-server causes this error? 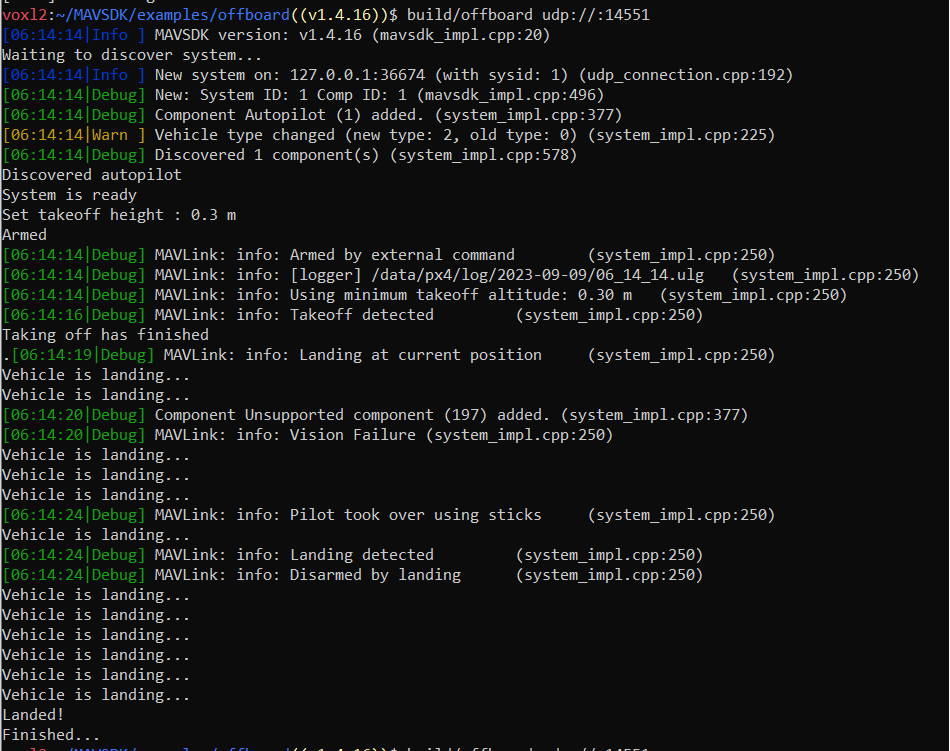
I'm working on Voxl 2 Starling drone and I'm not able to perform arm on manual mode. So, I did voxl-health-check on the drone indoor and I got error as shown below.
Can you advise how to fix this?