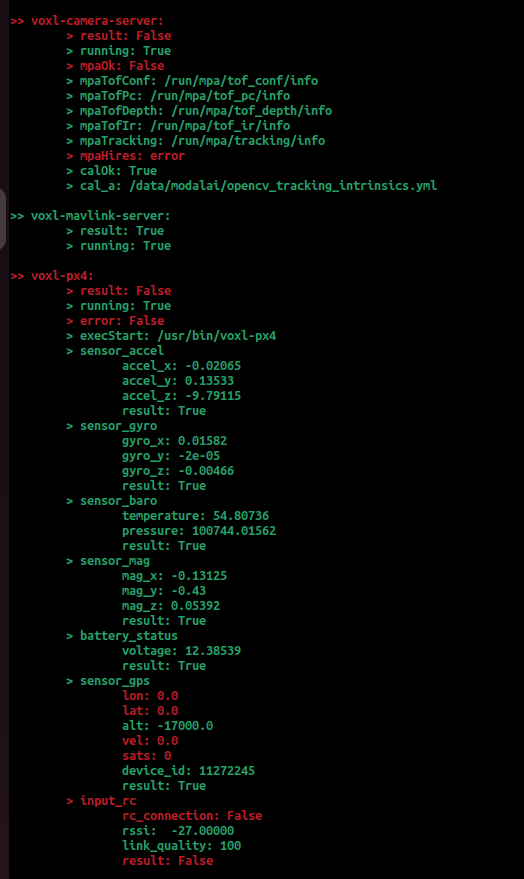
@Eric-Katzfey The RC is bind with the drone and it is able to control the drone. However, the check shows that there is no connection. Is the RC not bind correctly? Furthermore, when I perform takeoff and landing using the mavsdk program, there is an error on Visual Failure. Is the error in voxl-camera-server causes this error? [image: 1694482026732-offboard-takeoff-3.png]