@Vinny Hi, any inputs on this topic would be appreciated,
Thanks
@Vinny Hi, any inputs on this topic would be appreciated,
Thanks
Hi,
I was using ESC correctly for a while but after a small crash it is not working correctly. Next time I armed the drone, two motors burned (Motors 0 and 3 that matches the weird output bellow). I'm looking at the esc-tools and motors spin correctly when they are separately but when all 4 are working RPM, current, power are very badly.
What could I check to solve it?
Thanks
Bellow there's a short section of output for python voxl-esc-spin.py --id 255 --rpm 4500 --timeout 1
[2] RPM: 4473, PWR: 16, VBAT: 10.45V, TEMPERATURE: 36.30C, CURRENT: -0.49A
[3] RPM: 1418, PWR: 54, VBAT: 10.44V, TEMPERATURE: 35.21C, CURRENT: 24.40A
[0] RPM: 1659, PWR: 54, VBAT: 10.45V, TEMPERATURE: 35.99C, CURRENT: 21.18A
[1] RPM: 4482, PWR: 16, VBAT: 10.46V, TEMPERATURE: 35.41C, CURRENT: 0.04A
[2] RPM: 4473, PWR: 16, VBAT: 10.45V, TEMPERATURE: 36.30C, CURRENT: -0.49A
[3] RPM: 1418, PWR: 54, VBAT: 10.44V, TEMPERATURE: 35.21C, CURRENT: 24.40A
[0] RPM: 1659, PWR: 54, VBAT: 10.45V, TEMPERATURE: 35.99C, CURRENT: 21.18A
[1] RPM: 4496, PWR: 15, VBAT: 10.57V, TEMPERATURE: 35.55C, CURRENT: 0.18A
[2] RPM: 4473, PWR: 16, VBAT: 10.45V, TEMPERATURE: 36.30C, CURRENT: -0.49A
[3] RPM: 1418, PWR: 54, VBAT: 10.44V, TEMPERATURE: 35.21C, CURRENT: 24.40A
[0] RPM: 1659, PWR: 54, VBAT: 10.45V, TEMPERATURE: 35.99C, CURRENT: 21.18A
[1] RPM: 4496, PWR: 15, VBAT: 10.57V, TEMPERATURE: 35.55C, CURRENT: 0.18A
[2] RPM: 4586, PWR: 13, VBAT: 11.40V, TEMPERATURE: 36.14C, CURRENT: -0.16A
[3] RPM: 1418, PWR: 54, VBAT: 10.44V, TEMPERATURE: 35.21C, CURRENT: 24.40A
[0] RPM: 1659, PWR: 54, VBAT: 10.45V, TEMPERATURE: 35.99C, CURRENT: 21.18A
[1] RPM: 4496, PWR: 15, VBAT: 10.57V, TEMPERATURE: 35.55C, CURRENT: 0.18A
[2] RPM: 4586, PWR: 13, VBAT: 11.40V, TEMPERATURE: 36.14C, CURRENT: -0.16A
[3] RPM: 1553, PWR: 54, VBAT: 10.84V, TEMPERATURE: 35.27C, CURRENT: 24.09A
[0] RPM: 1366, PWR: 54, VBAT: 10.57V, TEMPERATURE: 36.34C, CURRENT: 20.84A
[1] RPM: 4496, PWR: 15, VBAT: 10.57V, TEMPERATURE: 35.55C, CURRENT: 0.18A
[2] RPM: 4586, PWR: 13, VBAT: 11.40V, TEMPERATURE: 36.14C, CURRENT: -0.16A
[3] RPM: 1553, PWR: 54, VBAT: 10.84V, TEMPERATURE: 35.27C, CURRENT: 24.09A
[0] RPM: 1366, PWR: 54, VBAT: 10.57V, TEMPERATURE: 36.34C, CURRENT: 20.84A
[1] RPM: 4499, PWR: 15, VBAT: 10.53V, TEMPERATURE: 35.42C, CURRENT: 0.18A
[2] RPM: 4586, PWR: 13, VBAT: 11.40V, TEMPERATURE: 36.14C, CURRENT: -0.16A
[3] RPM: 1553, PWR: 54, VBAT: 10.84V, TEMPERATURE: 35.27C, CURRENT: 24.09A
Hi @Vinny
Sounds good. I have order number 3143. We have the Voxl1 version ready to return.
I'll be here for further instructions
Thanks
Andres
Hi @modaltb
Thanks for your information. Yes that's the point. The non-funtional board of the picture just have the J3 board to board connector
We bought it separately with the following link which states carrier board only for VOXL2 https://www.modalai.com/products/mdk-m0090?variant=40594936463411
I believe I could test /dev/ttyHS1 connecting to J12 USB2? Otherwise, could we start a process to return this board and get the VOXL2 based board
Thanks
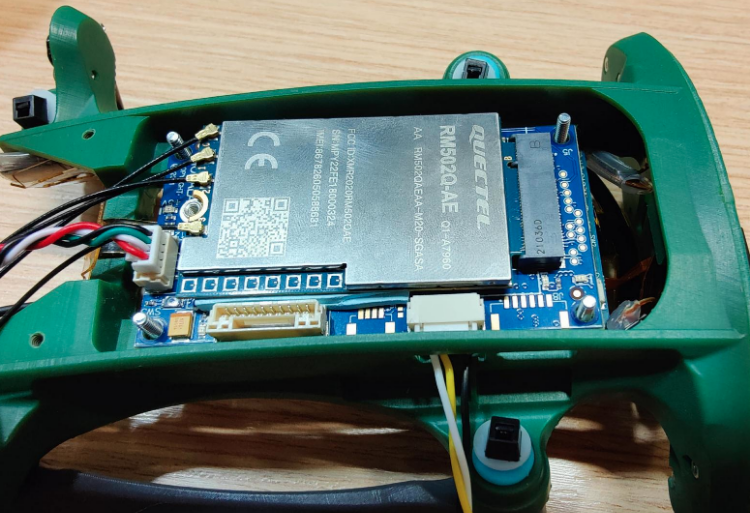
Hi @Vinny and @modaltb
The picture below shows the board that can not get serial in /dev/ttyHS2. I'm using J9 with pins 2/3 and 6. The cable and serial connection works in a different M0090 board
I mentioned the missing J8 as a difference from the working board and this one. 5G module and the wifi dongle on the USB works though
Thanks
Hi @Adrian-Hidalgo, I have the IMX214
I tried to move the small plastic ring around the lens and see some good focus on ground but when flying it appear to go out of focus.
Can this happen sometimes?
Re: [Using M.2 5G Modem Addon Board (M0090) on voxl2]
Hi
My question is quite similar to this previous topic. I'm trying to conect an external autopilot with the Addon Board (M0090) in J9 pin. The device /dev/ttyHS2 is available but can not get serial data using mavros (voxl-mavlink-service is disabled).
I launch in a different voxl2 kit and I am able to get the serial comunication running with the external autopilot.
The differences are:
voxl-suite: 0.9.5 and M0090 board with J8 solderedvoxl-suite: 0.9.4 and M0090 board with 5G module and mising J8 (we noticed it was shipped without this J8 pin), could it be a hardware issue?Thanks
Hello,
How can I correctly see the High resolution camera focused? I try moving the internal small circle but somehow it doesn't focus. Is there a way to lock it after its focused?
Thanks
Hello,
I'm trying to run a ToF sensor instead of the HIRes camera on HW Sensor ID:3 in this configuration but camera server is not recognizing the device sometimes. When I run voxl-camera-server -l sometimes the camera shows on the device list but other times it does not.
I believe in System Image 1.4.1, ToF has support on all 6 camera interfaces?
Thanks
@Eric-Katzfey I updated to release 0.9 and that solved the topic.
Thanks!
I was looking at how px4 service is initialized voxl-px4.service and I don't have a config file /etc/modalai/voxl-px4.config. Instead the voxl-px4 bash script points to /etc/modalai/voxl.config and that config file has the px4io detect or start under "M0052" platform
Then I found the system image in this Voxl2 is 1.2.1-M0054-14.1a-perf
This is how we received it at the end of November, would this be the issue?
Below the section of the voxl.config file
# On M0052 the GPS and RC drivers run on the apps processor
if [ $PLATFORM = "M0052" ]; then
# Pixhawk 4 GPS module
gps start -d /dev/ttyHS2
# RC input may be coming via either an external M0065 (aka px4io) module
# or a directly attached Spektrum receiver. First see if the M0065 is detected.
# This is only applicable for M0052. M0065 is not yet supported on M0054.
px4io detect
PX4IO_STATUS=$?
/bin/echo "PX4IO detect returned value $PX4IO_STATUS"
if [ $PX4IO_STATUS -eq 0 ]; then
/bin/echo "Found M0065, starting px4io"
px4io start
else
/bin/echo "M0065 not detected, starting Spektrum RC driver"
spektrum_rc start -d /dev/ttyHS1
fi
# On M0054 the GPS and RC drivers run on SLPI DSP
else
# Pixhawk 4 GPS module
# Only the newer Holybro unit is supported on M0054
qshell gps start -d 7 -b 115200
# Spektrum RC receiver
qshell spektrum_rc start -d 8
fi
Hi Eric,
The IO board is connected to J19 as shown here Host Connection
Then the px4io detect also shows open failed (notice below I'm running it without qshell)
pxh> qshell px4io detect
INFO [qshell] Send cmd: 'px4io detect'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: px4io detect
ERROR [muorb] SLPI: Command px4io not found
ERROR [muorb] SLPI: Failed to execute command: px4io detect
INFO [muorb] SLPI: Sending qshell retval with timestamp 87951625, current timestamp 87951627
INFO [qshell] cmd returned with: 1
INFO [qshell] qshell return value timestamp: 87951625, local time: 87956506
ERROR [qshell] Command failed
Command 'qshell' failed, returned -1.
pxh> px4io detect
ERROR [arch_px4io_serial] Open failed in init
ERROR [px4io] interface init failed
ERROR [px4] px4_task_exit: self task not found!
Thanks
Hi,
I am using a Voxl 2 IO Board to get a FrSky transmiter SBUS signal but the px4io can not start when the IO board is connected to Voxl2. When running the px4io status in shell like here How to Access the PX4 Shell. I get
pxh> qshell px4io status
INFO [qshell] Send cmd: 'px4io status'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: px4io status
ERROR [muorb] SLPI: Command px4io not found
ERROR [muorb] SLPI: Failed to execute command: px4io status
INFO [muorb] SLPI: Sending qshell retval with timestamp 191821788, current timestamp 191821790
INFO [qshell] cmd returned with: 1
INFO [qshell] qshell return value timestamp: 191821788, local time: 191824369
ERROR [qshell] Command failed
Command 'qshell' failed, returned -1.
Then I used the command without qshell but it still can't start
pxh> px4io status
ERROR [px4io] not started
ERROR [px4] px4_task_exit: self task not found!
I attempted to command start but it appears to not have the serial port enabled
pxh> px4io start
INFO [arch_px4io_serial] Open failed in init
ERROR [px4io] interface init failed
ERROR [px4] px4_task_exit: self task not found!
The status of the Voxl IO board is Running in waiting mode
Note: I tested the same VoxI IO board in a separated Voxl2 Flight Deck and seems to be working as I get RC commands in px4-listener input_rc and the status is Running in standar mode
Am I missing something?
Thanks