Surprise Halloween-themed SSH banner just made my day ") Thanks Devs!
Thanks Devs!
Surprise Halloween-themed SSH banner just made my day Thanks Devs!
@Alex-Gardner Is there any way to get the tag X.Y.Z coords in ROS?
yessss 6x9 and a white background both improved detection rate, not just latency. Thanks for your help!
@Alex-Gardner oops silly me!! The latency has been awful on this latest calibration, on the order of 2s, so that is probably a major contributor! Thanks I'll try with white tape an 6x9
Haha ok ^_^
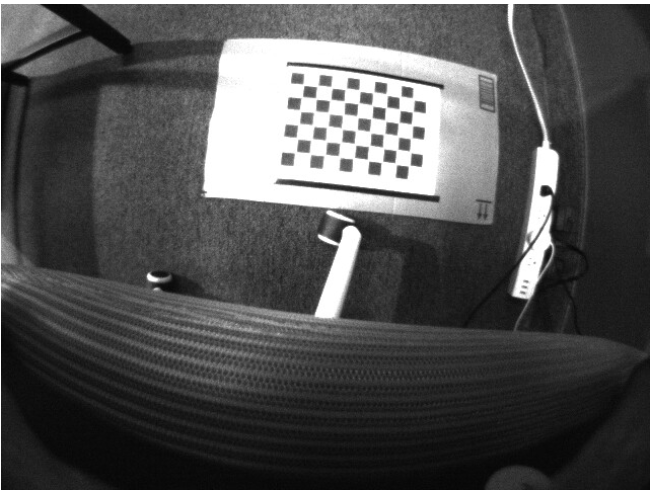
We moved out of the office to an overcast day outside. The image of the checkerboard looks good, how come it can't detect it?

Yes my image is MUCH noisier than that even when it's not over/underexposed. Lighting is bright though...
On another topic, should I be using --fisheye for the standard tracking cam?
Oh I see. Ok it's on standard printer paper, I'll try to get some more diffuse lighting...
The dynamic range is a little wide, but the normal tracking camera image looks quite fine
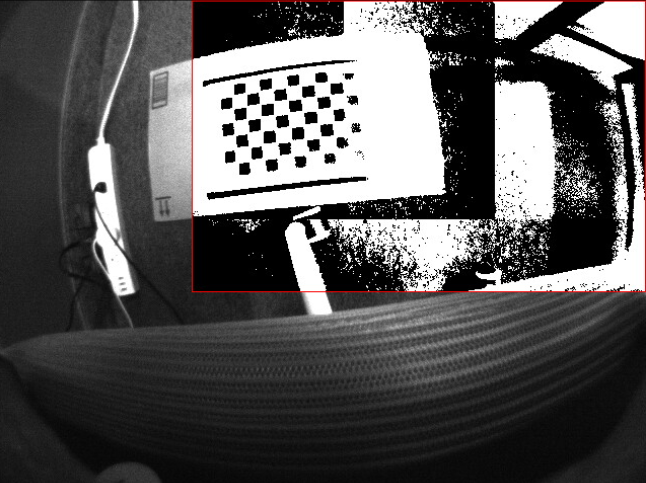
I should mention that it's not always overexposed like that. Obviously it wouldn't be able to identify the checkerboard with the edges blown out like that, but even when exposure is good, it doesn't work.
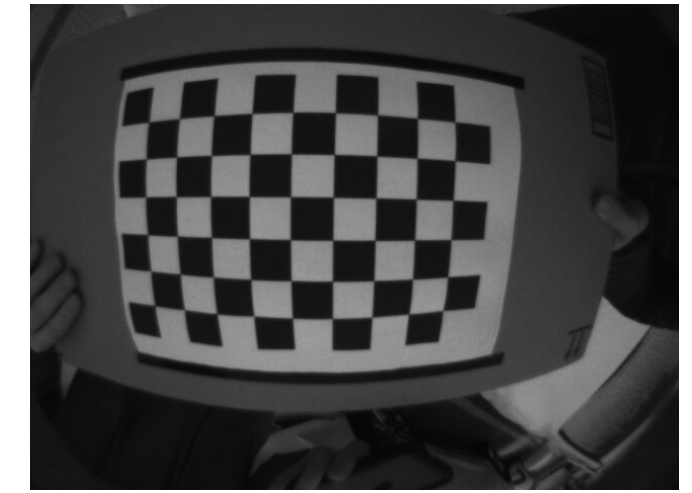
Why is it so overexposed?
Is this normal? The video tutorial doesn't look like this at all, with the weird 2-bit colour over-saturated look.
It's extremely hard to get it to detect the corners and draw those rainbow lines. I might try for like 2 or 3 minutes, holding different angles and positions, then it will flash the rainbow lines for and instant and I lose them again.
@modaltb Sorry for not replying. Is there an option to set up email notifications?
Yep I was talking to the ESC with voxl-esc python tools. And I believe it was indeed at 2Mbaud.
We've decided to use the FlightCore V2 as the flight controller going forward, with VOXL2 acting only as companion computer. We may revisit this sometime in the future as a weight-reduction exercise, but not any time soon
@Chad-Sweet @xav04 I have had a chance to get our new ModalAI x T-motor F55A ESCs out of the box and plug them in. I can communicate with them over FTDI converter on my laptop, but the VOXL2 doesn't recognise them.
There's not much troubleshooting I can do as the tutorial just says to plug it in and set the correct PX parameters. Do I remember correctly that I read somewhere the MAVLink console doesn't work on VOXL2? It certainly doesn't work on mine.
The motors don't spin when I arm, and I'm not getting any telemetry info from them.
I followed the tutorial for VOXL EXC V2. IS there anything special I need for the F55A?